КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Блок-схеми автоматичного керування
|
|
|
|
План
Пояснити процес регулювання руху машини за допомогою маховика.
5. Що називається регулятором швидкості? Принцип його дії.
Лекція “№40
Тема: “Промислові роботи та маніпулятори”
1. Промислові роботи та маніпулятори. Загальна схема рóбота.
2. Класифікація маніпуляторів.
3. Блок-схеми автоматичного керування.
1. Промислові роботи та маніпулятори. Загальна схема рóбота
Досягненням сучасних технологічних систем є промислові роботи – автономні машини-автомати, які мають універсальні виконавчі органи у вигляді механічних “рук”, рухами яких автоматично керують універсальні пристрої. У цих машинах гармонічно поєднуються високі показники точності, швидкодії, потужності, надійності, компактності з інтелектуальними достоїнствами, обумовленими сучасним рівнем техніки автоматичного керування. Сюди відносяться великий обсяг пам’яті, що забезпечує велику кількість можливих програм дій; зручність зміни програми; здатність контролювати правильність своїх дій; адаптивність; здатність реагувати на зміни зовнішнього середовища; здатність до самоосвіти й до оптимальних дій.
Маніпулятором називають технічний пристрій, призначений для відтворення робочих функцій рук людини.
Роботами називають маніпулятори, які мають органи переміщення і системи автоматичного керування.
 Загальна схема промислового робота, оснащеного автоматичною системою цифрового програмного керування або керованого універсальною ЕОМ, показана на рис.1. Промисловий робот зазвичай наділений 4-6 ступенями вільності, тобто забезпечує переміщення робочого органу по 4-6 координатах. На схемі зображений промисловий робот, корпус 1 якого переміщається по колії. Вертикальна колона 2, яка несе на собі “руку” 3, може повертатися в горизонталь-ній площині на кут 2b. “Рука” 3 може повертатися у вертикальній площині на кут 2α1 і навколо осі Х на кут g, переміщатися вниз-вгору на відстань Н і висовуватись вперед-назад на відстань L. Схоплювач 4 може повертатись на кут 2α2 і здійснювати замикання-розмикання губок.
Загальна схема промислового робота, оснащеного автоматичною системою цифрового програмного керування або керованого універсальною ЕОМ, показана на рис.1. Промисловий робот зазвичай наділений 4-6 ступенями вільності, тобто забезпечує переміщення робочого органу по 4-6 координатах. На схемі зображений промисловий робот, корпус 1 якого переміщається по колії. Вертикальна колона 2, яка несе на собі “руку” 3, може повертатися в горизонталь-ній площині на кут 2b. “Рука” 3 може повертатися у вертикальній площині на кут 2α1 і навколо осі Х на кут g, переміщатися вниз-вгору на відстань Н і висовуватись вперед-назад на відстань L. Схоплювач 4 може повертатись на кут 2α2 і здійснювати замикання-розмикання губок.
Промислові роботи зазвичай мають автономну систему керування або керування за схемою прямого керування ЕОМ–ЧПУ.
2. Класифікація маніпуляторів
Серед широкого спектру маніпуляторів слід виділити маніпулятори, керовані біострумами, ідея яких покладена в основу конструкції активного протезу руки, розробленого групою вчених та інженерів під керівництвом О.Є. Кобринського.
На рис.2 зображений електрогідравлічний біострумний маніпулятор. Від струмознімача 1 (накладних електродів, розміщених у браслеті в області м’язів) біоелектричний сигнал через посилювач 2 (який має автономні блоки живлення 10) поступає в електрогідравлічні золотники 3, наділені голками 8, які забезпечують подачу масла в гідроциліндр 6 від гідромотора 5, що приводиться в рух електродвигуном 4, або злив масла в резервуар 9. Залежно від того, в яку порожнину гідроциліндра 6 поступає рідина, пальці кисті 7 замикаються або розпрямляються.
 |
У протезах з біоелектричним керуванням за привід руху великого пальця і блоку решти чотирьох пальців використовується мініатюрний електродвигун, керований двома незалежними біоелектричними сигналами: один для керування схопленням, інший – для керуванням розкриттям.
Широке розповсюдження, особливо при маніпулюванні різними шкідливими для людини речовинами, отримали копіювальні маніпулятори (рис.3).
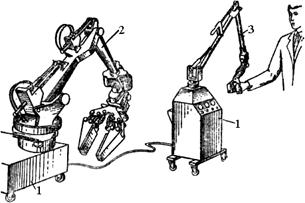
Рис.3
Переміщення каретки маніпулятора здійснюється за допомогою керувальних імпульсів з кнопкового пульту станції керування 1. Всі рухи “рукою” 2 маніпулятора здійснюються за допомогою керуючої “руки” 3, яка встановлена на станції керування. Рухи керуючої “руки” 3, виконувані людиною, за допомогою спостережної системи відтворюються “рукою” 2 маніпулятора. При цьому зусилля, що розвиває маніпулятор, можуть значно перевищувати зусилля людини.
Маніпулятори, як стаціонарні, так і ті, що можуть переміщатись по суші, у воді, в повітрі або в безповітряному просторі мають широкі перспективи використання у процесі освоєння морських глибин, космосу, при маніпулюванні громіздкими об’єктами (деревами, крупногабаритними елементами машинобудівельних і будівельних конструкцій тощо).
Залежно від типу зв’язку між керуючими і виконавчими механізмами копіювальні маніпулятори можуть бути поділені на такі групи.
Маніпулятори з механічним (кінематичним) зв’язком. Механічні копіювальні маніпулятори були пристроями, які почали використовуватись у шкідливих для життєдіяльності людини зонах. У цих маніпуляторах керуючий і виконавчий механізми зв’язані механічними передачами: зубчатими, тросово-стрічковими та іншими. Механічні передачі є реверсивними і мають високий к.к.д., у результаті чого на задаючій “руці” досить точно відображаються зусилля, які прикладаються до виконавчої.
Маніпулятори з магнітним приводом. Маніпулятори такого типу широко застосовуються особливо в тих випадках, коли необхідно забезпечити абсолютну герметизацію об’єму камер (роботи в зонах великого тиску, глибокого вакууму тощо). Як приводи в них використовуються муфти на магнітах, які дозволяють передавати рухи через “глуху” стінку, без отворів під передаточні механізми.
Сервоманіпулятори. Це назва закріпилась за копіювальними маніпуляторами, в яких керуючий і виконавчий механізми, розміщені дистанційно, зв’язані системами керування особливого виду – оборотними спостережними системами (ОСС). ОСС забезпечують однозначну відповідність по положенню між органами, які задають рух, та виконавчими органами. Кількість ОСС дорівнює кількості ступенів вільності маніпулятора.
Маніпулятори з кнопковим керуванням. Вони складаються, по суті, з виконавчого органу, який оснащений силовими приводами (електричними, гідравлічними або пневматичними) і зв’язаний з пультом керування електрокабелем. Кількість ступенів вільності цих маніпуляторів досягає 9-10.
Маніпулятори з автоматичним керуванням. Ці маніпулятори поділяються на два типи:
1. Маніпулятори з жорсткою програмою дій, які відтворюють певну сукупність рухів, передбачених програмою.
2. Маніпулятори, в яких операції рухів визначаються ЕОМ на основі інформації про зовнішнє середовище.
Перспективи розвитку промислових роботів і маніпуляторів пов’язані з наданням їх здатності відчувати, чути, бачити, оцінювати дистанцію, вміти розпізнати образи, реагувати на теплові та електромагнітні випромінювання широкого діапазону.
Роботи і маніпулятори можуть мати як ручне, так і автоматичне керування. У випадку ручного керування маніпулятором необхідно, щоб між силами, прикладеними до ланок маніпулятора, і силами, які діють на рухи оператора, була б відповідність.
На рис.4 показана одна із можливих систем керування. Це оборотна спостережна система. У ній обернений зв’язок не тільки інформує оператора про величину сил, що діють на виконавчий орган, а й відповідним чином змінює положення механізмів, що задають рух. Ця система називається двобічною, оскільки її спостережний привід виконаний так, що в ньому можна змінювати вхід і вихід.

Рис.4
Оператор прикладає момент сил М1 (рис.4). Пристрій “відчуття” вимірює момент М2 на виході приводу і діє на вхідний пристрій керуючого механізму моментом  . Виконавчий механізм діє на об’єкт моментом
. Виконавчий механізм діє на об’єкт моментом  . У цій системі момент впливає на положення ланок, що задають рух, прирівнюючи різницю між переміщенням х на вході і переміщенням у на виході, і залежить не тільки від дії оператора, але й від навантажень, що діють на допоміжний механізм.
. У цій системі момент впливає на положення ланок, що задають рух, прирівнюючи різницю між переміщенням х на вході і переміщенням у на виході, і залежить не тільки від дії оператора, але й від навантажень, що діють на допоміжний механізм.
Питання для самоконтролю
1.Що називається маніпулятором?
2.Дати означення роботу?
3.Перелічити переваги роботів і маніпуляторів.
4.Пояснити загальну схему промислового робота.
5.Як класифікуються маніпулятори? Сфера їх використання. Коротка характеристика.
6.Описати блок-схему оборотної спостережної системи керування.
ЛІТЕРАТУРА
1. Артоболевский И.И. Теория механизмов и машин. – М.: Высшая школа, 1988. – 640с.
2. Вербовский Г.Г. Теория механизмов и машин. – Харьков: изд-во Харьковского университета, 1968. – 274с.
3. Добронравов В.В. и др. Курс теоретической механики. – М.: Высшая школа, 1974. – 528с.
4. Завдання та методичні рекомендації до виконання комплексної розрахунково-графічної роботи з розділів “Кінематика” та “Динаміка” курсу “Технічна механіка” (для студентів спеціальності 7.010103 “Педагогіка та методика середньої освіти. Трудове навчання”) / В.П.Курок. – Глухів: ГДПУ, 2005. – 32с.
5. Кіницький Я.Т. Теорія механізмів і машин: підручник. – К.: Наукова думка, 2002. – 660 с.
6. Крайнёв А.Ф. Словарь-справочник по механизмам. – М.: Машиностроение, 1987. – 560с.
7. Лабораторні роботи з курсу “Технічна механіка” (розділ 3 “Кінематика” та розділ 4 “Динаміка”)/В.П.Курок. – Глухів: РВВ ГДПУ, 2005. – 54с.
8. Левитская О.М., Левитский Н.И. Курс теории механизмов и машин. – М.: Высшая школа, 1985. – 279с.
9. Машков А.А. Теория механизмов и машин. – Минск: Вышэйшая школа, 1971. – 471с.
10. Мещерский И.В. Сборник задач по теоретической механике. – М.: Наука, 1986. – 448с.
11. Никитин Е.М. Краткий курс теоретической механики для вузов. – М: Наука, 1983 (1971). – 400 с.
12. Павловский М.А., Путята Т.В. Теоретическая механика. – К.: Высшая школа, 1985.-328 с.
13. Попов М.В. Теоретическая механика. Краткий курс. – М.: Наука, 1986. – 336с.
14. Тарг С. М. Краткий курс теоретической механики. – М.: Высшая школа.,1986. (1974) – 416с.
15. Технічна механіка. Розділ: Кінематика: навч. посібник / Автор і укладач: Курок В.П. – К., 2004. – 90 с.
16. Фролов К.В. и др. Теория механизмов и машин. – М.: Высшая школа, 1987. – 496с.
17. Цасюк В.В. Теоретична механіка: Навчальний посібник. – Київ: Центр навчальної літератури, 2004. – 402 с.
 Навчальний посібник
Навчальний посібник
Автор і укладач:
Курок Віра Панасівна
Технічна механіка. Курс лекцій
Комп’ютерна верстка та технічне редагування
В. Галай
Підп. до друку ____.Формат 60×84/16. Гарнітура Таймс.
Папір офсетний. Умов. друк. арк. ____. Умов. фарб.-відб. ____.
Облік.-вид арк. ____.Тираж 500 прим. Вид. № ____.
Віддруковано на різографі.
Редакційно-видавничий відділ
Глухівського державного педагогічного університету.
41400, м. Глухів, Сумська обл., вул. Києво-Московська, 24,
тел/факс (05444) 2-33-06.
Свідоцтво про внесення суб’єкта видавничої справи до державного реєстру видавців, виготівників і розповсюджувачів видавничої продукції (серія ДК №678) від 19.11.2001 р.
ISBN ББК
[*] Тут і надалі у позначенні суми від 1 до n будемо опускати.
|
|
|
|
|
Дата добавления: 2014-10-23; Просмотров: 694; Нарушение авторских прав?; Мы поможем в написании вашей работы!