КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные теоретические положения. Работа 5. Исследование параметров релейной позиционной системы
|
|
|
|
Цель работы
Работа 5. Исследование параметров релейной позиционной системы
Задание на лабораторную работу
При заданных коэффициентах передаточной функции непрерывной части системы и заданном периоде квантования Т находят передаточную функцию замкнутой дискретной системы, и система проверяется на устойчивость.
Изучается влияние изменения коэффициента усиления системы K и периода квантования Т на характеристики системы.
Изменяют коэффициент усиления. В блоке W вводят коэффициенты передаточной функции W н (s), причем принимают K = А. Заданный период квантования Т устанавливается в блоке идеального импульсного элемента. Подбирается диапазон изменения коэффициента К шаг D K так, чтобы число точек на каждой ветви корневого годографа было бы в пределах 10 - 12, и примерно половина точек находилась в области устойчивости, остальные - вне этой области. (Ограничения программы: начальное значение К не должно равняться 0). Полученный график распечатывается на принтере или срисовывается с экрана монитора с помощью курсора.
Для двух коэффициентов усиления на ветвях годографа: один - для K в области устойчивости, другой - для K в области неустойчивости, нужно получить амплитудно-фазовые характеристики и перенести их в отчет.
Изменяют период квантования Т. Устанавливают значение коэффициента усиления из области устойчивости, а период квантования в блоке идеального импульсного элемента обозначают через параметр.
Целью работы является исследование влияния параметров релейной позиционной системы управления на характеристики отработки заданных перемещений и определение значений параметров, обеспечивающих оптимальный режим по быстродействию.
 Упрощенная принципиальная схема исследуемой компьютерной модели приведена на рис.1. Система содержит двигатель постоянного тока М, включенный в диагональ контактного моста, питаемого напряжением 30 В и образованного контактами силовых реле Р1 и Р2.
Упрощенная принципиальная схема исследуемой компьютерной модели приведена на рис.1. Система содержит двигатель постоянного тока М, включенный в диагональ контактного моста, питаемого напряжением 30 В и образованного контактами силовых реле Р1 и Р2.
|
На одном валу с двигателем находятся: маховик МАХ, редуктор РЕД, тахогенератор ТГ и вращающийся потенциометр R2, выполняющий роль датчика обратной связи по положению. Величина необходимого перемещения исполнительного органа задается с помощью движка потенциометра R1, включенного вместе с потенциометром R2 в мостовую схему, питаемую напряжением  . Тахогенератор ТГ является датчиком скорости вращения двигателя М. С помощью ТГ и потенциометра R3 образуется отрицательная обратная связь по скорости двигателя. Таким образом, исследуемая система является двухконтурной, содержащая контура скорости и положения.
. Тахогенератор ТГ является датчиком скорости вращения двигателя М. С помощью ТГ и потенциометра R3 образуется отрицательная обратная связь по скорости двигателя. Таким образом, исследуемая система является двухконтурной, содержащая контура скорости и положения.
При изменении положения движка потенциометра R1 в мостовой схеме появляется выходное напряжение, прикладываемое к катушке реле РП. Реле РП срабатывает и замыкает свой контакт в цепи реле Р1 и Р2. Напряжение, приложенное к катушке реле РП:

При достижении  двигатель переводится в режим противовключения и быстро тормозится. При выполнении
двигатель переводится в режим противовключения и быстро тормозится. При выполнении  двигатель отключается от источника напряжения.
двигатель отключается от источника напряжения.
1. Структурная схема системы управления
Структурная схема исследуемой системы управления (рис.2) включает в себя математические модели двигателя, редуктора, тахогенератора и релейной части системы.
Передаточная функция двигателя с редуктором и маховиком
где  механическая постоянная двигателя, учитывающая механическую инерцию маховика (
механическая постоянная двигателя, учитывающая механическую инерцию маховика ( );
); коэффициент усиления двигателя по скорости (
коэффициент усиления двигателя по скорости ( );
); коэффициент передачи редуктора (
коэффициент передачи редуктора ( );
);  угол поворота вращающегося потенциометра R2;
угол поворота вращающегося потенциометра R2;  напряжение питания двигателя (
напряжение питания двигателя ( );
);  скорость вращения двигателя.
скорость вращения двигателя.
Тахогенератор в структурной схеме представлен безинерционным звеном 
 , входящим в состав коэффициента
, входящим в состав коэффициента  , в котором дополнительно учтен коэффициент передачи потенциометра обратной связи по скорости R3.
, в котором дополнительно учтен коэффициент передачи потенциометра обратной связи по скорости R3.
 |
Релейная часть системы представлена в схеме моделью реле с гистерезисной характеристикой.
Компьютерная схема
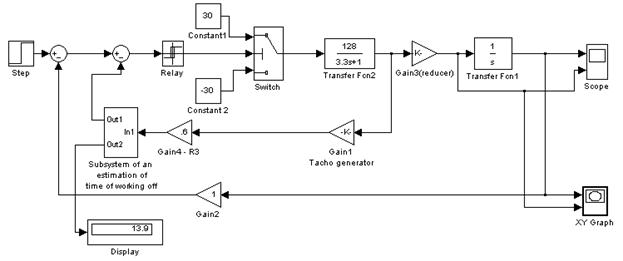
Рис.3
Компьютерная модель (рис. 3) полностью повторяет структурную схему рис.2 в части цифровых значений параметров системы. Отличия от структурной схемы следующие.
Совмещенный узел сравнения структурной схемы заменен двумя раздельными узлами. Коэффициент  представлен также двумя коэффициентами усиления: Gain1 моделирует коэффициент передачи тахогенератора, Gain4 эквивалентен потенциометру обратной связи по скорости R3. Переключатель Switch с двумя блоками Constant 1 и Constant 2 заменяет силовые реле Р1 и Р2.
представлен также двумя коэффициентами усиления: Gain1 моделирует коэффициент передачи тахогенератора, Gain4 эквивалентен потенциометру обратной связи по скорости R3. Переключатель Switch с двумя блоками Constant 1 и Constant 2 заменяет силовые реле Р1 и Р2.
Осциллограф Scope делает доступным наблюдение скорости и угла поворота выходного вала двигателя; осциллограф XY Graph строит фазовые траектории процессов отработки заданных перемещений.
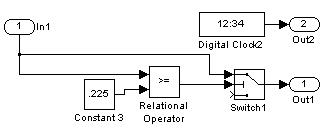
Рис. 4
Подсистема оценки времени отработки заданного рассогласования (Subsystem of an estimation of time of working off), представленная на рис.4, необходима для определения оптимальной по времени настройки исследуемой системы. Подсистема имеет один вход и два выхода. На вход подается сигнал с датчика скорости (с потенциометра R3). Выход Out1 подсоединен к узлу сравнения контура скорости, выход подсистемы оценки времени (Out2) подключен к цифровому дисплею, на экране которого выводится цифровое значение времени отработки в секундах.
Подсистема оценки времени содержит блок выполнения операций отношения (Relational Operator), настроенный на сравнение сигнала обратной связи по скорости с постоянным сигналом с Constant 3. Выходной сигнал блока операций отношения управляет
переключателем Switch 1, который пропускает, либо задерживает сигнал обратной связи. Кроме двух описанных блоков подсистема содержит также дискретный источник времени (Digital Clock), работающий совместно с цифровым дисплеем.
|
|
|
|
|
Дата добавления: 2014-10-31; Просмотров: 417; Нарушение авторских прав?; Мы поможем в написании вашей работы!