КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Динамика вращательного движения твердого тела. Вращательное действие силы характеризуется моментом силы относительно точки (рис
|
|
|
|
Вращательное действие силы характеризуется моментом силы относительно точки (рис. 5а) и относительно оси (рис. 5б).
Для того чтобы определить момент силы  относительно точки О, проведем из точки О радиус-вектор
относительно точки О, проведем из точки О радиус-вектор  в точку приложения силы (рис. 5а). Моментом силы относительно точки О называется векторная физическая величина, равная векторному произведению радиуса-вектора на силу :
в точку приложения силы (рис. 5а). Моментом силы относительно точки О называется векторная физическая величина, равная векторному произведению радиуса-вектора на силу :

Модуль момента силы M = r×F×sina = F×d, где d = r×sina – плечо силы.
Для того чтобы определить момент силы относительно оси Z, выберем на оси Z произвольную точку, найдем момент силы относительно этой точки, а затем спроецируем на ось Z момент силы относительно точки. Таким образом, момент силы относительно оси – величина скалярная.
Разложим силу на три составляющие (рис. 5б):
 – осевая, параллельная оси вращения,
– осевая, параллельная оси вращения,
 – радиальная, перпендикулярная оси вращения,
– радиальная, перпендикулярная оси вращения,
 – касательная, перпендикулярная
– касательная, перпендикулярная  и оси вращения.
и оси вращения.
Составляющую можно определить как проекцию силы на направление вектора  , направленного по касательной к окружности радиусом R, проведенной через точку приложения силы перпендикулярно оси вращения. Направление вектора образует с осью Z правовинтовую систему.
, направленного по касательной к окружности радиусом R, проведенной через точку приложения силы перпендикулярно оси вращения. Направление вектора образует с осью Z правовинтовую систему.
Составляющие и вращения тела относительно оси Z не вызывают. Вращающее действие силы обусловлено составляющей . Можно показать, что момент силы относительно оси Z

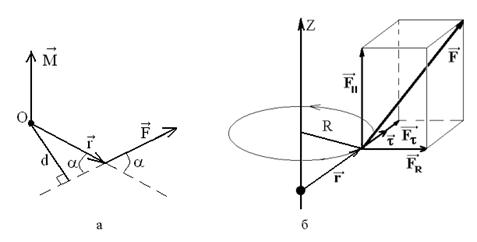
Рис. 5
Инертные свойства тела при вращательном движении характеризует м омент инерции. Он зависит от распределения массы тела относительно оси вращения. Момент инерции материальной точки массой m, находящейся на расстоянии r от оси:  .
.
 – момент инерции системы материальных точек;
– момент инерции системы материальных точек;
 – момент инерции тела, где
– момент инерции тела, где  – плотность тела.
– плотность тела.
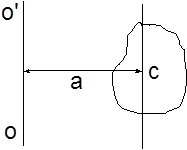
Рис. 6
Момент инерции тела относительно произвольной оси может быть рассчитан по теореме Штейнера: моментинерции тела относительно оси O'O равен сумме момента инерции тела относительно оси, проходящей через центр инерции и параллельной O'O, и произведения массы тела на квадрат расстояния между осями (рис. 6):
 .
.
Моментом импульса материальной точки относительно некоторой точки называется векторная величина, равная векторному произведению радиуса-вектора на импульс материальной точки (рис. 7а):
 .
.
Моментом импульса системы материальных точек называется геометрическая сумма моментов импульсов точек, составляющих систему:
 .
.
Моментом импульса материальной точки относительно оси Z называется скалярная величина, равная проекции момента импульса относительно произвольной точки, лежащей на оси Z, на эту ось. Аналогично моменту силы относительно оси, момент импульса относительно оси Z

где pt – проекция импульса на направление вектора , направленного по касательной к окружности радиусом, проведенной через материальную точку перпендикулярно оси вращения (рис. 7б). Направление вектора образует с осью Z правовинтовую систему.
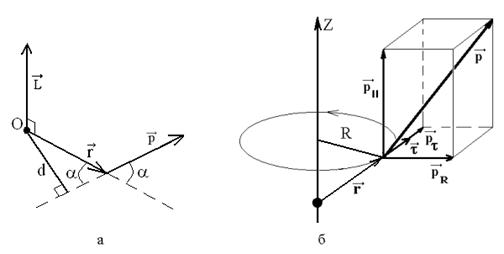
Рис. 7
Момент импульса тела относительно оси вращения
LZ = IZ×wZ,
где IZ – момент инерции тела относительно оси Z, wZ – проекция угловой скорости тела на ось Z. Для однородного тела, вращающегося относительно оси симметрии:
 .
.
Основной закон динамики вращательного движения:
Скорость изменения момента импульса тела относительно оси равна результирующему моменту внешних сил относительно этой же оси (проекция углового ускорения на ось пропорциональна результирующему моменту внешних сил относительно оси и обратно пропорциональна моменту инерции тела относительно этой же оси):
Из законов динамики поступательного и вращательного движений следует условие равновесия тел:
|
|
|
|
|
Дата добавления: 2014-11-25; Просмотров: 911; Нарушение авторских прав?; Мы поможем в написании вашей работы!