КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Движение с одним датчиком освещенности
|
|
|
|
Релейный регулятор
Релейным двухпозиционным регулятором называется регулятор, у которого регулирующий орган под действием сигнала от датчика может принимать одно из двух крайних положений: "открыт" - "закрыт". При этом приток энергии к регулируемому объекту может быть только максимальным или минимальным.
Рассмотрим пример трехколесной (одно колесо пассивное) роботизированной тележки с одним датчиком освещенности, который должен двигаться по плоской поверхности вдоль границы черного и белого.

Рис. 5.1.
Регулирующим органом объекта в данном случае будут два колеса, подключенные к сервоприводам. Регулируемая величина - положение датчика освещенности, привязанное к конкретному значению уровня освещенности. Нагрузка на объект (возмущающее воздействие) - это движение робота вперед вдоль линии границы. Поскольку линия может быть кривой, а также вследствие других факторов при отсутствии регулирующего воздействия робот непременно съедет с линии.
Подключим левый мотор на порт В, правый - на порт С (такой выбор портов - традиция для наборов Mindstorms NXT). Стартовая позиция робота - датчик на белом. Построим программный регулятор, который обеспечит движение по дуге в сторону черного, пока робот на белом, и движение по дуге в сторону белого, пока робот на черном. Для этого выключается или резко понижается мощность одного из моторов. Вот реализация на RobotC.
Здесь SensorValue[S1] обозначает получения результатов измерения датчика подключенного к порту S1, в данном случае подразумевается, что это датчик освещённости. Команда Motor[MotorC]=100 устанавливает скорость вращения мотора C на 100% вперёд, диапазон при этом от -100 до 100. Команда wait1msec(1) устанавливает задержку в одну миллисекунду, необходимую для того, что бы устройство успело выполнить подаваемую команду.
Значение "серого" (grey) может быть константой для данной системы или вырабатываться в результате предварительной калибровки как среднее арифметическое черного и белого.
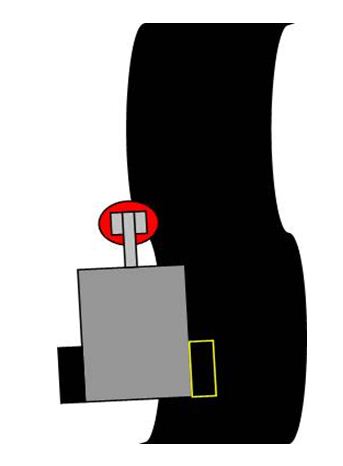
Рис. 5.2.
Под управлением такого регулятора робот движется вдоль линии границы по ломаной кривой, периодически наезжая то на черное, то на белое. Скорость его невысока, стабильность тоже, а траектория движения оставляет желать лучшего. Все это издержки использования двухпозиционного релейного регулятора.
|
|
|
|
|
Дата добавления: 2014-11-26; Просмотров: 565; Нарушение авторских прав?; Мы поможем в написании вашей работы!