КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Движение по линии
|
|
|
|
Взять азимут
Если читателю удалось обзавестись компасом от компании Hitechnic, стоит попробовать и его использовать вместе с П- регулятором.
Задачка проста. Взять азимут и ехать в заданном направлении, никуда не сворачивая. Пусть alpha - азимут, т.е. угол, полученный с компаса на момент старта, a s1 - показания датчика компаса в каждый момент времени.
alpha=s1; while (true) { preg=k*(A-s1); Motor[MotorB]=50+preg; Motor[MotorC]=50-preg; }Напомним, что для надежности работы компас должен быть отодвинут от моторов и контроллера не менее, чем на 15 см. Кроме того, желательно, чтобы поблизости не было сильных магнитных полей.
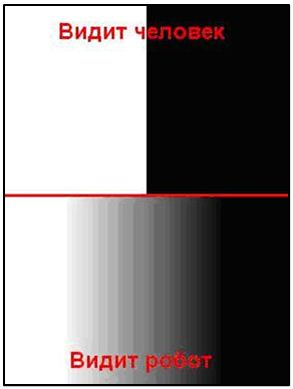
Рис. 5.5.
Поначалу это может показаться странным, но движение по границе черного и белого тоже можно построить на П-регуляторе. Хотя внешне задача представляется решаемой только с помощью релейного регулятора, поскольку в системе присутствует всего два видимых человеческому глазу состояния: черное и белое. Но робот все видит иначе, для него отсутствует резкая граница между этими цветами.
Можно сказать, он близорук и видит градиентный переход оттенков серого. Вот это нам и поможет построить П-регулятор.
Так же как и в релейном регуляторе, необходимо определить среднее значение между черным и белым, обозначим его grey. Это будет то состояние датчика освещенности s1, к которому должна стремиться система.
while(true) { up=k*(s1-grey); motor[MotorB]=50+up; motor[MotorC]=50-up; wait1msec(1); }Коэффициент  может быть достаточно мал (от 1 до 3) для маневренного устройства.
может быть достаточно мал (от 1 до 3) для маневренного устройства.
Такой регулятор эффективно работает только для малых углов отклонения, поэтому устройство надо ставить в направлении движения так, чтобы датчик оказался по левую сторону от черной линии. Если датчик заедет на черную линию, регулятор станет отрицательным и левый мотор будет ехать медленнее правого, что выровняет робота. Нетрудно заметить, что движение по линии на П-регуляторе отличается плавностью и на некоторых участках робот движется практически прямолинейно, или точно повторяя изгибы линии.
|
|
|
|
|
Дата добавления: 2014-11-26; Просмотров: 499; Нарушение авторских прав?; Мы поможем в написании вашей работы!