КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пропорционально-дифференциальный регулятор
|
|
|
|
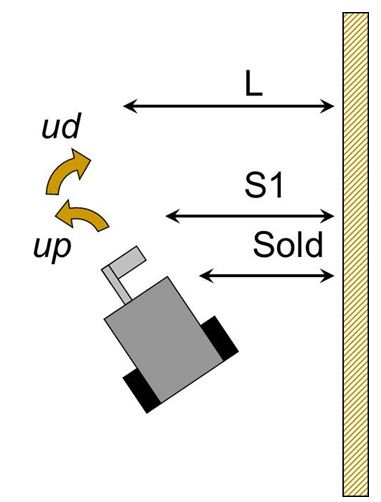
Рис. 5.7.
В некоторых ситуациях П-регулятор может вывести систему из устойчивого состояния. Например, если робот направлен от стенки, но находится к ней ближе заданного расстояния, на моторы поступит команда еще сильнее повернуть от стенки, в результате чего с ней может быть утерян контакт (напоминаем, что датчик расстояния получает отраженный сигнал практически только от перпендикулярной поверхности).
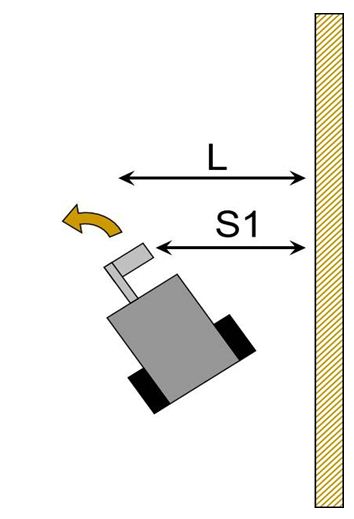
Рис. 5.8.
Для защиты от подобных ситуаций добавим в регулятор дифференциальную составляющую, которая будет следить за направлением движения робота. Иными словами, вектор скорости будет влиять на управляющее воздействие. Известно, что скорость находится как  , где
, где  - это изменение расстояния за промежуток времени
- это изменение расстояния за промежуток времени  . Определим дифференциальный регулятор через скорость отклонения робота от заданного положения:
. Определим дифференциальный регулятор через скорость отклонения робота от заданного положения:

где  - текущее расстояние до стенки,
- текущее расстояние до стенки,  - расстояние на предыдущем шаге.
- расстояние на предыдущем шаге.
Поскольку замеры производятся через равные промежутки времени, то можно принять за константу.

Таким образом, ПД-регулятор описывается формулой из двух слагаемых

Можно показать, что для устойчивого достижения цели коэффициент  при дифференциальной составляющей должен превышать
при дифференциальной составляющей должен превышать  (см. ниже статью "Элементы теории автоматического управления в школе").
(см. ниже статью "Элементы теории автоматического управления в школе").
Алгоритм движения вдоль стенки на ПД-регуляторе в целом будет выглядеть так:
Sold=L=S1; while(true) { upd= k1*(S1-L) + k2*(S1-Sold); Motor[MotorB]=50+upd; Motor[MotorC]=50-upd; Sold=S1; wait1msec(1); }Для объезда предметов потребуется ввести контроль показаний датчика расстояния: при резком изменении робот должен делать вывод о возможном повороте, который надо будет производить с другими коэффициентами.
|
|
|
|
|
Дата добавления: 2014-11-26; Просмотров: 488; Нарушение авторских прав?; Мы поможем в написании вашей работы!