КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Движение вдоль стенки
|
|
|
|
Решим такую задачу. Робот должен двигаться вдоль стенки на заданном расстоянии L. Предположим, что левое колесо робота управляется мотором В, правое - мотором С, а датчик расстояния, подключенный к порту 1, закреплен несколько впереди корпуса тележки (это важно!) и направлен на стенку справа по ходу движения.
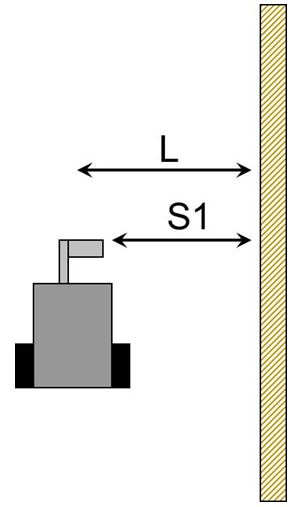
Рис. 5.6.
Расстояние до стенки в настоящий момент времени, которое показывает датчик, обозначим  .
.
Моторы двигаются со средней скоростью 50, но при отклонении от заданного курса на них осуществляется управляющее воздействие up. Снова обозначим это следующим образом.
Motor[MotorB]=50+up; Motor[MotorC]=50-up;Осталось определить, чему будет равно управляющее воздействие. Это нетрудно:

Таким образом, при  робот не меняет курса и едет прямо. В случае отклонения его курс корректируется. Здесь
робот не меняет курса и едет прямо. В случае отклонения его курс корректируется. Здесь  - это некоторый усиливающий коэффициент, определяющий воздействие регулятора на систему. Для робота NXT средних размеров коэффициент k может колебаться от 1 до 10 в зависимости от многих факторов. Предлагаем подобрать его самостоятельно.
- это некоторый усиливающий коэффициент, определяющий воздействие регулятора на систему. Для робота NXT средних размеров коэффициент k может колебаться от 1 до 10 в зависимости от многих факторов. Предлагаем подобрать его самостоятельно.
В данном случае регулятор будет эффективно работать только при малых углах отклонения. Кроме того, движение практически всегда будет происходить по волнообразной траектории. Сделать регулирование более точным позволит введение новых принципов, учитывающих отклонение робота от курса.
|
|
|
|
|
Дата добавления: 2014-11-26; Просмотров: 710; Нарушение авторских прав?; Мы поможем в написании вашей работы!