КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Геодезические работы при монтаже оборудования 2 страница
|
|
|
|
Влияние первых трех погрешностей можно рассчитать по формулам:
 ;
;  ;
;  ,
,
где  — цена деления уровня; s — расстояние до рейки; (s2 — s1) — разность расстояний до задней и передней реек; vy, vн— увеличение оптической системы контактного уровня и зрительной трубы нивелира; I — угол непараллельности визирной оси и оси уровня.
— цена деления уровня; s — расстояние до рейки; (s2 — s1) — разность расстояний до задней и передней реек; vy, vн— увеличение оптической системы контактного уровня и зрительной трубы нивелира; I — угол непараллельности визирной оси и оси уровня.
Погрешности то и тр принимаются равными 0,05 и 0,1 мм.
Общую погрешность взгляда и превышения рассчитывают по формулам
 .
.
Последняя формула учитывает погрешности взглядов на две рейки и измерение превышений дважды (по основной и дополнительной шкалам).
Следует подчеркнуть, что точность прецизионного нивелирования в большой мере зависит от условий выполнения измерений. Для монтажной площадки характерно большое скопление металлических конструкций, подвергающихся летом сильному солнечному нагреву, а зимой большому охлаждению (температура металла, как правило, на 4—6 °С выше летом и ниже зимой, чем температура воздуха) и являющихся источником рефракционных искажений. П.В. Павлив разработал метод механического учета рефракции в турбулентной атмосфере путем наведения углового биссектора сетки на нижнее изображение колеблющегося штриха, а не на ось симметрии колебания этого штриха (середина между нижним и верхним изображением), как это принято в настоящее время. Способ позволяет не только повысить точность нивелирования в турбулентной атмосфере, но, главное, производить работы в течение всего дня.
При монтажных работах для выведения контролируемых точек на заданный проектный уровень используют подкладки, винтовые домкраты, гидравлические подъемники. Контроль высоты подъема производят нивелиром по рейке или при помощи индикаторной подставки, включающей опорную плиту, стойку, консоль и индикатор часового типа. Для укрепления на конструкции оборудования опорная плита подставки снабжена магнитным основанием. Для нивелирования направляющих машин, особенно в процессе эксплуатации, применяют различные конструкции гидростатических профилографов. В Японии для нивелирования конструкций небольшой протяженности применяют профилограф, схема действия которого состоит в следующем. Параллельно с исследуемой поверхностью устанавливается лоток с жидкостью, создающей искусственный горизонт — поверхность относимости. По направляющей перемещается каретка, снабженная шпинделем с измерительным наконечником, контактируемым с исследуемой поверхностью. Вертикальные перемещения измерительного наконечника передаются через изоляционные пластины и колонки на диск, являющийся одной из обкладок конденсатора. Другой обкладкой конденсатора служит поверхность жидкости. Разность уровней определяется по разности измеренных емкостей. Высокая чувствительность емкостных преобразователей обеспечивает высокую точность измерения малых превышений.
1.4.4.5. Выверка вертикальности
В строительно-монтажном производстве и при наблюдениях за деформацией сооружений и оборудования выверка вертикальности конструкций является наиболее распространенным процессом. Ее выполняют следующими основными методами: механической вертикали- (струнный отвес, монтажная линейка с накладным уровнем или оптическим квадрантом, рейка-уровень, рейка-отвес), оптической вертикали (прибор вертикального визирования, теодолит, оптический центрир), вертикальной референтной плоскости (коллимационной плоскости теодолита, лазерного планосканера и др.).
При выверке вертикальности конструкций струну отвеса укрепляют при помощи кронштейна в ее верхней части, а внизу к струне прикрепляют груз, погружаемый в демпфирующую жидкость (трансформаторное или автомобильное масло).
Измерения отклонений конструкций от вертикали осуществляют, как правило, при помощи нутромера. Для исключения погрешности контактирования со струной в нутромере применяют электроконтактную микрометрическую головку. Основание нутромера для большего контакта с выверяемой конструкцией и удобства выполнения измерений выполнено с мап+итным прихватом. Система электрического контакта нутромера, состоящая из миллиамперметра, наушников телефонного типа, регулировочных сопротивлений и источника 'Питания (батареи), обеспечивает нулевое измерительное усилие контактирования нутромера со струной. Одну клемму батареи присоединяют к нутрометру, а вторую — к подвешенной струне, изолированной специальной втулкой на кронштейне от выверяемой конструкции. Точность способа зависит главным образом от шероховатости конструкции и точности измерений микрометрической головкой нутромера.
При большой, высоте конструкций или повышенных требованиях к установке используют метод оптической или лазерной вертикали. Методика работ этими методами показана ниже на примере установки колонн и ионизационных каналов АЭС.

Рис.36.Схема выверки вертикальности колонны навесными приборами
Контроль вертикальности колонн при помощи навесных приборов. В практике монтажа каркасов котлов, стеллажей и этажерок вертикальность колонн можно контролировать приборами, навешенными непосредственно на устанавливаемые конструкции. Навесной прибор (рис. 36) содержит датчик вертикали 10, зрительную трубу 2 и приемное устройство 5, размещенные на одинаковых кронштейнах 1, 4, обеспечивающих параллельность линии визирования и оси конструкции. Датчик вертикали обычно включают в оптическую схему зрительной трубы. Например, жидкостный стабилизатор вертикали, расположенный на половине фокусного расстояния объектива, выполняет одновременно роль фокусирующей системы трубы. Визирную марку с координатной палеткой устанавливают на кронштейне до подъема конструкции краном, а прибор вертикального визирования после приведения и временного закрепления колонны — примерно в отвесном положении. После закрепления прибора на кронштейне приводят его по широкопредельному круглому уровню в рабочее положение, когда вступает в действие датчик вертикали. Визируя зрительной трубой на марку, определяют двухкоординатные элементы крена и координируют положение колонны. После этого вторично измеряют элементы крена и при необходимости доводят ось колонны в отвесное положение. В лазерном исполнении тот же прибор вертикального визирования оборудуется насадкой, включающей источник лазерного излучения 9, отражатель (триппельпризма) 5, полупрозрачное зеркало 8, защитное стекло 7, фотодетектор 3. При необходимости фотодетектор снабжают усилителем и мультивибратором, подающим звуковой сигнал об отвесном положении конструкции.
Луч лазера сначала подается на светоделительную куб-призму -сетки нитей трубы, направляется на отклоняющую призму, жидкостный компенсатор, объектив трубы, полупрозрачное зеркало, защитную пластинку и отражатель. Затем он проходит защитную пластинку, падает на полупрозрачное зеркало и, отражаясь от него, входит в фотодетектор.
Работа с лазерным прибором осуществляется по аналогичной методике, но вместо координатной палетки на кронштейне устанавливают отражатель, причем его можно закреплять там постоянно или подавать наверх при помощи троса, вставленного в отверстие и блок консоли на земле перед подъемом колонны краном. После установки колонны примерно в отвесное положение, когда лазерный луч попадает в зону действия отражателя, обратный световой сигнал принимается фотодетектором, где также измеряются двухкоординатные элементы крена колонны.
Достоинством такого прибора является возможность двухсторонней стабилизации вертикали и работы в двух режимах (визуальном и лазерном).
Близка к описанной предложенная О.Л. Тыщуком методика выверки вертикальности оси ротора циркуляционного насоса при помощи нивелира N1007 (ГДР) с насаженной на прибор пентапризмой и установленной перед ней плоскопареллельной пластинкой оптического микрометра. Прибор устанавливают над верхним вкладышем подшипника, а в центре нижнего отверстия вкладыша размещают в суппорте визирную марку, соединенную с часовым индикатором. Погрешность измерения в этом случае оказалась равной 0,08 мм при допускаемой 0,1—0,15 мм (длина ротора 5 м).
Выверка вертикальности ионизационных каналов. Ионизационные каналы (ИК) АЭС предназначены для проверки радиоактивности вокруг реактора при помощи опускаемых в них ионизационных приборов.
Составные трубы И К должны быть расположены вертикально с погрешностью не более 1—2 мм на всю высоту (до 14 м).
В процессе монтажа вертикальность труб ИК контролируют обычными средствами: теодолитом или отвесом. Основная трудность состоит в исполнительной съемке труб до и после укладки бетона, так как в процессе бетонирования возможны нарушения в их положении. Так как съемку производят по отдельным сечениям, расположенным по вертикали через 1 м, то наиболее эффективным является редукционный способ. В основу этого способа положено использование самоцентрирующейся визирной марки (центроискателя) 4 (рис. 37) и прибора вертикального визирования типа PZL 7, установленного на редукционной подставке 9. Центроискатель состоит из цилиндрического корпуса, в нижней и верхней части которого установлено по три подпружиненных шарика 5, обеспечивающих совмещение и фиксацию оси корпуса центроискателя с осью ИК. В нижней части корпуса закреплена визирная цель 3, подсвечиваемая электролампочкой 8 от батареи 7. В ионизационном канале 2 Центроискатель подвешивают на заданной высоте при помощи рулетки 6, которая одновременно используется для фиксации отметки измеряемого сечения. Прибор типа PZL устанавливают на редукционную подставку 9, которая позволяет перемещать его в двух взаимно перпендикулярных направлениях, отсчитывая величины перемещений а =х — хo и b=у — уo на координатных шкалах подставки, где xo, х и yo, у — отсчеты на шкалах подставки, соответствующие исходному положению прибора (основанию трубы ИК) и положению прибора при съемке текущей точки сечения.
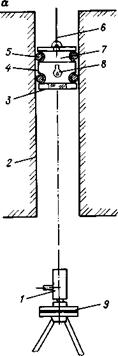

Рис. 37. Схема выверки вертикальности ионизационного канала: а — схема наблюдений; б — составляющие крена
По измеренным смещениям а и b можно вычислить общее смещение с центра сечения ИК в текущей точке относительно основания ИК и его условный азимут e:

Измерение крена способом прямой угловой засечки. В основу способа положен метод построения вертикальной референтной плоскости при помощи теодолита.
Для определения крена требуются наблюдения в двух плоскостях, составляющих между собой, в общем случае, двугранный угол у. Для контроля измерений наблюдения обычно выполняют в трех и более плоскостях. Каждая коллимационная плоскость проходит через точку О основания (нижнюю часть) конструкции или сооружения и является референтной для измерения величины нестворности (неплоскостности) q верхней точки О. Если точка О размещена справа от референтной, то величине q присваивают знак "плюс", а если слева — знак "минус" (наблюдатель находится у теодолита). Величины qi,- (i = = 1,2,..., n) могут быть получены способом бокового нивелирования или способом измерения малых углов Dbi.
Измерение крена производят следующим образом. Выбрав места удобной установки теодолитов, например пункты А и В, для наблюдений нижнего, верхнего и промежуточных сечений объекта, и пункты стабильного ориентирования исходных направлений А и В, визируют теодолитом на края (образующие) конструкции (слева и справа), по среднему отсчету находят направления  и
и  (i = 1,2) соответственно для центров нижнего Он и верхнего Ов сечений (рис. 38). Наблюдения производят при двух положениях круга несколькими приемами (обычно не менее двух). По разности одноименных направлений находят разностные углы:
(i = 1,2) соответственно для центров нижнего Он и верхнего Ов сечений (рис. 38). Наблюдения производят при двух положениях круга несколькими приемами (обычно не менее двух). По разности одноименных направлений находят разностные углы:
 ;
;  ,
,
которые при вертикальном положении конструкции равны нулю.
Знак и величина угла  характеризуют направление и степень отклонения конструкции от вертикали: при положительном значении угла верх отклонен вправо от низа, а при отрицательном влево.
характеризуют направление и степень отклонения конструкции от вертикали: при положительном значении угла верх отклонен вправо от низа, а при отрицательном влево.
Для определения отклонения в линейной мере (крена) необходимо измерить расстояния S1 и S2 от теодолитов до центра конструкции. Тогда крены будут следующими:
 ;
;  .
.
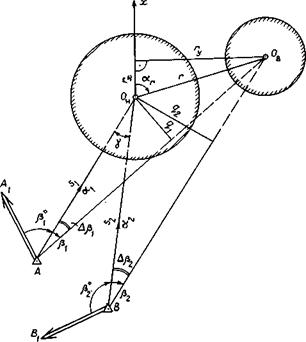
Рис. 38. Схема определения крена способом прямой угловой засечки
Если линии визирования теодолитов взаимно перпендикулярны, то общий крен r и его азимут ar определяют по формулам 
 , а если они составляют угол
, а если они составляют угол  , то находят проекции общего крена на оси координат, общий крен и его ориентировку (азимут по формулам):
, то находят проекции общего крена на оси координат, общий крен и его ориентировку (азимут по формулам):
 ;
;
 ;
;

где  ,
,  — азимуты направлений визирования (засечки).
— азимуты направлений визирования (засечки).
Последний способ чаще применяют при эксплуатации сооружений и оборудования. Для контроля измерений наблюдения крена производят с 3—4 станций.
1.4.4.6. Выверка наклона
Наклон конструкции и элементов оборудования проверяют различными способами: нивелированием, при помощи теодолита, при помощи оптического квадранта.
При выверке наклонности методом нивелирования (геометрического или гидростатического) определяют превышение точек и расстояние между ними. Тогда искомый уклон и угол наклона находят по формулам

где h,L — превышение и расстояние между нивелируемыми точками; I — уклон; v — угол наклона.
Погрешности определяемых величин определяют по формулам
 ;
;
 ,
,
где mh,mL — погрешности измерения превышения и расстояния (горизонтального приложения) между выверяемыми точками.
Для выверки наклона конструкции теодолитом используют вертикальный круг и измеряют углы наклона v1 и v2 при визировании на визирные марки, установленные в выверяемых точках (рис. 39, а). Тогда отметки Н1 и Н2 искомых точек, превышение между ними и уклон будут
 ;
;  ;
;


При выверке наклонности рольгангов и других подобных элементов оборудования сначала задают плановое положение точек, а затем проверяют положение этих точек по высоте. В практике многих работ высоты марок одинаковы и поэтому разность v2 — v1 равна нулю. Более того, при фиксированном плановом положении точек оборудования коэффициенты tgv будут постоянными.
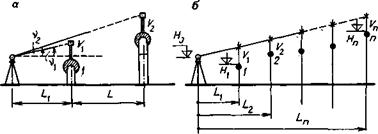
Рис. 39. Способы нивелирования наклонных конструкций: а — тригонометрический; б — наклонным створом
Первую (исходную) точку оборудования обычно задают отметкой и выводят ее на заданный уровень при помощи нивелира. Поэтому, измерив на эту точку угол наклона  , проектное значение угла наклона
, проектное значение угла наклона  на вторую точку оборудования найдем по формуле
на вторую точку оборудования найдем по формуле

где I — проектный уклон. Сопоставив вычисленный угол v2 с его измеренным значением  , т.е., зная разность
, т.е., зная разность  , можно вывести зрительную трубу теодолита на заданный наклон, установив на круге угол
, можно вывести зрительную трубу теодолита на заданный наклон, установив на круге угол  . При этом наклоне закрепляют трубу и конструкцию поднимают или опускают до тех пор, пока визирная марка высотой v2 не окажется в точке пересечения сетки нитей.
. При этом наклоне закрепляют трубу и конструкцию поднимают или опускают до тех пор, пока визирная марка высотой v2 не окажется в точке пересечения сетки нитей.
При затруднениях в контроле перемещения конструкции по результатам измерений углов наклона монтажникам выдают величину смещения (рихтовки) по высоте, определяемую по формуле
Этот метод чаще всего можно использовать при исполнительной съемке оборудования, например криволинейных конвейеров УНРС, наклонных транспортеров и т.п.
При выверке наклона протяженных линий, когда погрешности измерения углов наклона теодолитом могут оказать доминирующее влияние на точность способа тригонометрического нивелирования, применяют способ наклонного створа. Для этого геометрическим нивелированием определяют отметки  и
и  начальной и конечной точек створа (оборудования). Затем на некотором неизвестном расстоянии от начальной точки оборудования устанавливают теодолит, ориентируют зрительную трубу по оси оборудования и под углом наклона, близким к проектному наклону технологической линии, и так, чтобы с одной стоянки прибора были видны все точки створа (рис. 39, б). В этом случае, при постоянном наклоне визирной оси трубы к горизонту, производят отсчеты
начальной и конечной точек створа (оборудования). Затем на некотором неизвестном расстоянии от начальной точки оборудования устанавливают теодолит, ориентируют зрительную трубу по оси оборудования и под углом наклона, близким к проектному наклону технологической линии, и так, чтобы с одной стоянки прибора были видны все точки створа (рис. 39, б). В этом случае, при постоянном наклоне визирной оси трубы к горизонту, производят отсчеты  no рейке (или марке с микрометрической головкой), последовательно устанавливаемой на начальной, всех промежуточных и конечной точках наклонного створа. Измерив затем горизонтальные проложения
no рейке (или марке с микрометрической головкой), последовательно устанавливаемой на начальной, всех промежуточных и конечной точках наклонного створа. Измерив затем горизонтальные проложения  или соответствующие им наклонные расстояния
или соответствующие им наклонные расстояния  между точками оборудования, определяют угол наклона линии визирования к горизонту по формулам
между точками оборудования, определяют угол наклона линии визирования к горизонту по формулам

и отметки всех промежуточных точек наклонного створа
где  — горизонт теодолита.
— горизонт теодолита.
Погрешность определения отметки какой-либо точки выражается зависимостями 
По малости величины  в погрешность превышения
в погрешность превышения  практически входит погрешность нивелирной связи двух точек оборудования, зависящая от точности нивелирования (класса). Если начальная и конечная точки наклонного створа находятся на разных уровнях, то для определения разности их отметок производят передачу высоты при помощи рулетки и двух нивелиров.
практически входит погрешность нивелирной связи двух точек оборудования, зависящая от точности нивелирования (класса). Если начальная и конечная точки наклонного створа находятся на разных уровнях, то для определения разности их отметок производят передачу высоты при помощи рулетки и двух нивелиров.
Для измерения углов наклона плоских и цилиндрических конструкций оборудования, а также установки их под заданным углом к горизонту применяют оптический квадрант КО-1М, КО-10М и др. Основными частями квадранта, например КО-ЮМ (рис. 40), являются: магнитное основание 8, корпус 5 с неподвижно закрепленным в нем стеклянным лимбом, поворотный круг — алидада с отсчетным микроскопом 2, цилиндрическим уровнем 1. На корпусе имеются закрепительный и наводящий (коаксиальные) винты 6 и 7 поворотного круга, связанного с уровнями, винт оптического микрометра 4 и зеркало подсветки круга 3.
В процессе измерений прибор устанавливают на плоскость (поверхность) конструкции, ослабляют зажимной винт и вращают рукой алидаду с уровнем до тех пор, пока пузырек продольного уровня не окажется в середине ампулы (цена деления уровня 10'). Затем при закрепленном зажимном винте вращением наводящего винта пузырек продольного уровня приводят точно в нуль-пункт и после совмешения микрометром изображений диаметрально противоположных частей лимба (рис. 41) производят отсчет угла по шкале микроскопа (цена деления шкалы 10"). На рис. 41 этот отсчет равен 2°12'44". Аналогичное измерение производят при перестановке прибора на 180°.
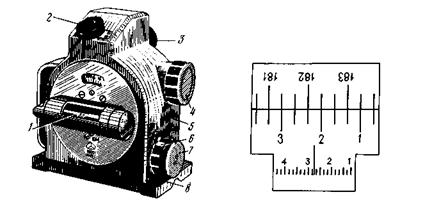
Рис.40. Оптический квадрант КО-10м Рис.41.Поле зрения отсчетного микроскопа
оптического квадранта КО-10м
При установке прибора на выверяемой поверхности необходимо исключать его поперечный наклон, наблюдая за положением пузырька поперечного уровня.
Для установки конструкции под заданным уклоном необходимый угол наклона устанавливают на лимбе, помещают прибор на поверхность этой конструкции и наклоняют ее до тех пор, пока пузырек продольного уровня не окажется в нуль-пункте. Магнитное основание обеспечивает надежный контакт прибора с поверхностью конструкции. Если требуется проверить наклон двух смежных роликов (или секции рольганга), на них устанавливают сначала контрольную линейку, а на линейку — прибор.
При измерении углов наклона необходимо учитывать место нуля, которое определяют путем установки прибора на одной и той же поверхности при перестановке его на 180°. Место нуля определяют по формуле

где  — отсчеты по кругу при двух положениях прибора. Юстировку МО производят исправительными винтами уровня при установке на приборе значения угла наклона рабочей поверхности
— отсчеты по кругу при двух положениях прибора. Юстировку МО производят исправительными винтами уровня при установке на приборе значения угла наклона рабочей поверхности 
Точность измерений оптическим квадрантом зависит главным образом от чистоты рабочей поверхности выверяемых конструкций. Опыт работы с прибором показывает, что при использовании контрольной линейки погрешность задания наклонной поверхности составляет 0,3— 0,5 мм/1 м.
Оптический квадрант можно использовать для выверки, как наклонности, так и горизонтальности и вертикальности конструкций (корпусов и плит оборудования, каркасов котлов, направляющих подъемников и т.п.), особенно при их первоначальной установке (до выверки геодезическими приборами).
При последовательной передаче уклона с секции на секцию погрешность измеренного смещения (превышения или отклонения от вертикали) рассчитывают по формуле  , где
, где  — погрешность превышения при одной установке прибора; К, L — длины контрольной линейки и выверяемой конструкции.
— погрешность превышения при одной установке прибора; К, L — длины контрольной линейки и выверяемой конструкции.
При  , что свидетельствует о достаточно высокой точности работ (чистота поверхности конструкции не учитывается).
, что свидетельствует о достаточно высокой точности работ (чистота поверхности конструкции не учитывается).
1.4.4.7. Выверка параллельности
Параллельность конструкций оборудования (направляющих, базовых плоскостей и т.п.) имеет большое значение для повышения долговечности оборудования.
При проверке параллельности используют способы, основанные на измерении расстояния между точками конструкции, расположенными в одном поперечном сечении.
Обычно выверка параллельности является задачей, сопутствующей выверке прямолинейности. Поэтому сначала одним из известных способов производят выверку прямолинейности одной (базовой) направляющей, а затем относительно нее выставляют параллельно вторую.
Наибольшее распространение в практике получили способы: с применением нутромера с микрометрической головкой (часовым индикатором); с применением рулетки; съемки каждой направляющих относительно двух Суворов.
Нутромер с микрометрической головкой или индикатором часового типа используют главным образом для выверки параллельности близко расположенных друг от друга направляющих (обычно 1—3 м).
Измерение расстояний между выверяемыми точками конструкции при помощи рулетки является наиболее распространенным способом при выверке металлоконструкций направляющих подъемно-транспортного оборудования. Измерение производят на весу или по предварительно подготовленной (выровненной) поверхности. При этом создают постоянное натяжение рулетки и учитывают поправки за компарирование, температуру, наклон и иногда провес (если осуществляется на весу, а компарирование — на выровненной поверхности).
Вместо рулетки для измерения изменений ширины колеи подкранового пути, например при измерениях деформаций, а по существу — расстояний между рельсами пути в каждом пролете, можно использовать способ провеса струны, предложенный Д.Н. Ковунцом и Н.А. Володиным. Струну длиной l протягивают между двумя симметрирующими устройствами, определяющими положение осей рельсов при известном расстоянии L1 между ними (рис. 42). При подвешенном грузе струна будет иметь некоторую стрелу изгиба  так что
так что

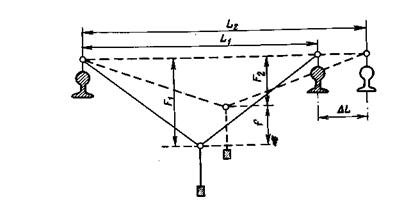
Рис.42.Схема измерений ширины колеи подвесной струной
Если систему переместить в другой пролет, где ширина пути равна  , что стрела изгиба струны F2 будет меньше . При неизменной длине струны запишем
, что стрела изгиба струны F2 будет меньше . При неизменной длине струны запишем

Приняв  , где f - изменение стрелы изгиба струны, приращение ширины в пролете получим
, где f - изменение стрелы изгиба струны, приращение ширины в пролете получим
 L =
L = 
Таким образом, измерив, изменение стрелки изгиба струны в текущем пролете относительно стрелы в начальном пролете, можно легко определить изменение ширины колеи. Погрешность составит
 ,
,
где тF — погрешность измерения изменения стрелы прогиба.
Из этой формулы следует, что для высокой точности измерений стрелу Fl следует делать небольшой. Следует подчеркнуть, что стрелу можно измерять с крана, присоединив к грузу струну с индексом и фиксируя его смещение относительно неподвижной шкалы, закрепленной на мосту крана в кабине крановщика.
Если при перемещении крана изменяется и высотное положение рельсов, то из измерений разности стрел изгиба F необходимо вычесть половину превышения h между головками рельсов в пролете h =Н2—Н1, т.е. в расчете использовать приведенную к горизонту разность стрел F =F-h/2.
|
|
|
|
|
Дата добавления: 2014-11-16; Просмотров: 1192; Нарушение авторских прав?; Мы поможем в написании вашей работы!