КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Качество регулирования (точность процесса управления)
|
|
|
|
Пример определения запаса устойчивости САУ с помощью критерия Найквиста
Необходимо определить запас устойчивости САУ на основе следующих данных объекта управления и И – регулятора:
kо = 0,26, Tо = 0,1 с, ξ = 0,45, kи = 20
Решение:
Передаточная функция разомкнутой системы будет выглядеть следующим образом:

Подставим в формулу (2.62.) р = jω и получим:

Подставив числовые значения, получим:

С помощью полученного выражения строим годограф Wр (jω), вид которого представлен на рисунке 81.
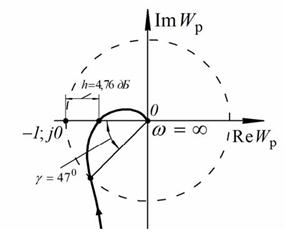
Рис.81. Годограф Wр (jω)
На основании анализа годографа можно заметить, что он не охватывает точку с координатами (−1; j0), пересекая действительную отрицательную ось в точке (0,58; j0). Полученные данные позволяют сделать вывод, что система устойчива и запас устойчивости по модулю составляет h = 4,76 дБ, а запас устойчивости по фазе γ = 470.
При расчете САУ необходимо учитывать не только устойчивость системы, т.к. и в устойчивой системе могут возникать переходные процессы, влияющие на точность управления и на время перехода из одного установившегося состояния в другое установившееся состояние. Поэтому САУ должна обладать необходимым качеством регулирования, которое определяется величиной ошибки управления δ (t), являющейся разностью между заданным yз(t) и фактическим y(t) значениями управляемого параметра:
δ (t) = yз (t) − y(t) (2.65.)
Для получения необходимой точности процесса управления выделяют две функции САУ, характеризующиеся:
а) воспроизведением управляющего воздействия,
б) подавлением или компенсацией возмущения.
Звенья систем обладают некоторой инерционностью, которая увеличивает инерционность системы в целом, поэтому указанные функции всегда имеют некоторую погрешность, а значит, δ (t) ≠ 0, т.е. ошибка существует. Значение ошибки не может быть определено теоретическим путем, т.к. в процессе функционирования САУ совокупность задающих и возмущающих воздействий может изменяться стохастически. Для удобства расчетов качества регулирования используют критерии качества, которые количественно могут охарактеризовать точность процесса управления раздельно, как в установившихся, так и в переходных процессах.
|
|
|
|
|
Дата добавления: 2014-11-16; Просмотров: 396; Нарушение авторских прав?; Мы поможем в написании вашей работы!