КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Таймеры счетчики
|
|
|
|
Таймеры-счетчики предназначаются для формирования временных интервалов и подсчета событий, что позволяет (при использовании соответствующего программного обеспечения) реализовывать на их основе любые функции времени, в том числе управление в реальном времени (т. е. во временном масштабе объекта).
Обобщенная структура таймера-счетчика показана на рис.3.
Таймер-счетчик базируется на синхронном двоичном реверсивном счетчике с возможностью параллельной загрузки и чтения информации. Так как разрядность счетчика МК, как правило, превышает разрядность процессора, используется адресный обмен информацией между ядром МК и частью регистра данных счетчика.
В указанной структуре при одновременной активизации сигналов RD и CS на внутреннюю шину МК коммутируется выходная шина таймера-счетчика, в противном случае внутренняя шина МК коммутируется к входам параллельной загрузки. Собственно загрузка данных в таймер-счетчик Произойдет при одновременной активизации сигналов WR и CS.
Система управления позволяет определить источник задания направления счета (программно-доступный бит управления или внешний сигнал), а также источник тактирования (опорная частота ядра или внешние импульсы) и коэффициент деления тактовых импульсов. Полный диапазон счета— от 0 до 2n. Для задания временных интервалов, отличных от номинального (являющегося максимальным), используется предварительная программная загрузка счетчика (величиной N = Т/Ткваита при счете на убывание или Nmax - N при счете на возрастание). При достижении кода 0 (при счете на убывание) или Nmax (при счете на возрастание) генерируется сигнал переполнения OV (Overflow), доступный как для программных средств (при чтении регистра состояния системы управления таймером-счетчиком), так и для внешней аппаратуры, в частности для объекта.
Следует отметить, что решение задачи выдержки временных интервалов возможно применением чисто программных средств: зная время t выполнения некоторой инструкции, несложно организовать ее N-кратное выполнение в цикле, тем самым обеспечив задержку длительностью Т = Nt, однако в этом случае невозможно выполнение иных программных действий (например, сбора информации, обмена данными с оператором и пр.); кроме того, значение кванта t может оказаться неудовлетворительно большим.
Для расширения возможностей реализации функций времени, достигаемых с применением таймеров-счетчиков, в состав периферийных устройств некоторых моделей МК введены блоки аппаратной обработки временных событий, связанных с таймерами-счетчиками. Название таких блоков в МК различных фирм может отличаться (часто применяемые названия: ЕРА (Event Processors Array — массив процессоров событий), HSIO (High Speed Input/Output unit — блок быстрого ввода-вывода), РСА (Programmable Counters Array— массив программируемых счетчиков) и др.).
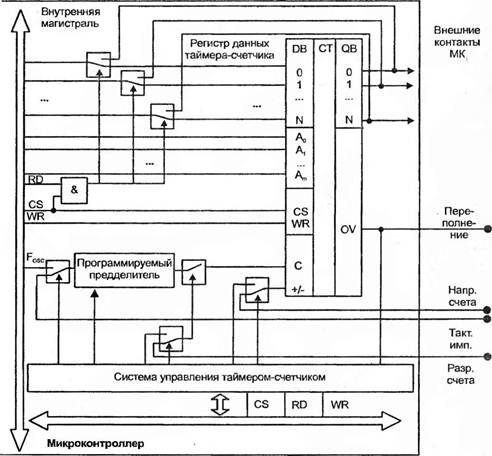
Рис. 3. Структура таймера-счетчика
Таймеры-счетчики реализованы практически во всех моделях МК.
Основными задачами таких блоков являются:
определение момента наступления события заданного вида (захват события). Принципиальной трудностью программной реализации захвата является невозможность точного чтения показаний регистра данных таймера без его останова (т. к. разрядность таймера превышает разрядность внутренней шины, и процедура последовательного чтения фрагментов регистра неизбежно будет проведена с искажениями);
генерация события заданного вида в заданный момент времени (привязка события ко времени). Принципиальной трудностью программной реализации привязки является существование временной задержки между моментом обнаружения заданного момента времени (например, по переполнению регистра данных таймера) и моментом исполнения команды генерации заданного логического события;
поддержка многоканальных указанных видов на общей временной базе. Принципиальной трудностью программной реализации многоканальных является сложность и неэффективность наблюдения за показаниями таймера со стороны нескольких программных модулей.
Особенно существенно отмеченные трудности проявляются при малых интервалах времени между событиями, программная обработка которых вносит вычислительные погрешности в генерируемые интервалы
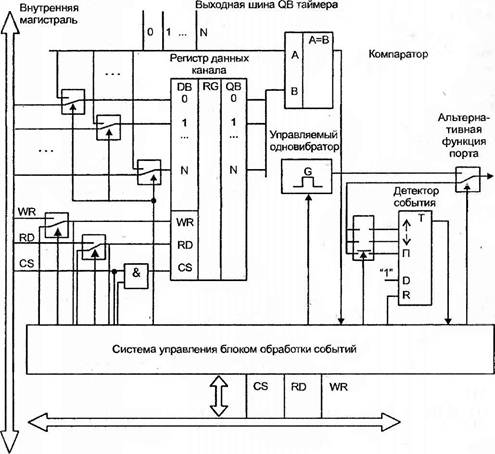
Рис. 4 Структура канала блока обработки событий
Структура канала блока обработки событий показана на рис. В качестве общей временной базы блока обработки выбран один из таймеров-счетчиков МК, шина QB которого, отражающая показания времени, поступает на все каналы модуля. Источник/приемник обрабатываемых/генерируемых событий является альтернативной функцией порта ввода-вывода МК.
В случае реализации захвата путем записи в регистр системы управления определяется тип обнаруживаемого входного события — фронта среза или перепада Сигнала, что приводит к коммуищии входного сигнала на один из входов синхронизации триггера детектора событий. Кроме того, в режиме захвата система управления модулем скоммутирует на разряды входной шины регистра канала одноименные разряды выходной шины таймера. При обнаружении события заданного типа система управления сформирует сигналы CS и WR регистра данных канала, что приведет к аппаратной фиксации показаний таймера в регистре данных канрла. Таким образом, в регистр данных канала аппаратно (т. е. с минимальными временными задержками) будут занесены и доступны прикладной программе показания таймера базы в момент появления заданного сигнала на входе микросхемы МК.
В случае реализации привязки путем записи в регистр системы управления определяется тип выходного события, что приводит к соответствующей настройке управляемого одновибратора. Кроме тою, в режиме захвата система управления модулем скоммутирует на разряды входной шины регистра канала одноименные разряды внутренней шины МК. После записи со стороны прикладной программы значений в регистр данных канала начнется ожидание требуемого момента времени. При совпадении Показаний'таймера базы и содержимого регистра данных канала компаратор сформирует сигнал, сигнализирующий системе управления о необходимости перезапуска одновибратора. Таким образом, при достижении заданного момента времени аппаратно (т. е. с минимальными временными задержками) на выходе микросхемы МК будет сгенерирован сигнал заданною вида.
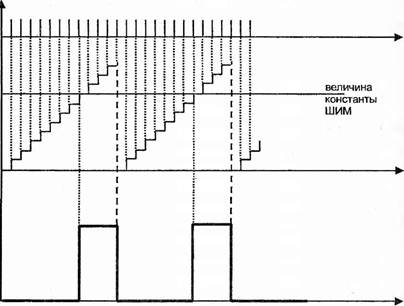
Следует отметить, что средствами блока обработки событий могут быть реализованы и дополнительные режимы: например, перезагрузка регистра данных таймера базы по достижении им заданного кода, чтение показаний регистра данных таймера базы без останова таймера (т. е. захват не внешнего, а программного события), а также генерация широтно-импулъсно-модули- ривинных (ШИМ) сигналов. Рассмотрим более подробно последний режим. ШИМ-сигнал представляет собой периодический двоичный сигнал с фиксированным периодом Тис управляемой длительностью импульса. Канал, настроенный на данный режим, при совпадении показаний регистра данных таймера базы и регистра данных канала (хранящего значение константы ШИМ), формирует начало импульса, а по достижении счетчиком максимального значения завершает импульс и начинает новый период ШИМ (рис.).
Так как инерционность объекта существенно превышает инерционность системы управления объектом, генератор высокочастотного ШИМ воспринимается объектом как генератор, выдающий мощность, пропорциональную длительности импульсов ШИМ.
Блоки обработки событии реализованы в МК Infineon, Intel, Motorola и др.
Цифро-аналоговые преобразователи (ЦАП) служат для перевода кодового представления выводимой из цифровой вычислительной системы информации в эквивалентный этому коду аналоговый сигнал (выходное напряжение). Максимальная величина аналогового сигнала равна опорному напряжению. А цифровой код пропорционален выходному напряжению.
Конфигурируя блок ЦАП посредством записи настроечных команд в регистр системы управления, пользователь может выбрать источник опорных напряжений.
На выходе ЦАП имеется усилитель-повторитель, решающий вопросы согласования с объектом управления. Выходные разряды регистра данных ЦАП управляют ключами, осуществляющими выбор слагаемого для данного разряда:. макс при единичном значении разряда, мин — при нулевом.
Аналоговые компараторы
Аналоговые компараторы (АК) служат для сравнения значений двух входным напряжений: U1 и U2. Результатом сравнения является битовый результат у = (U1 > U2), истинный при U1 > U2 и ложный в противном случае.
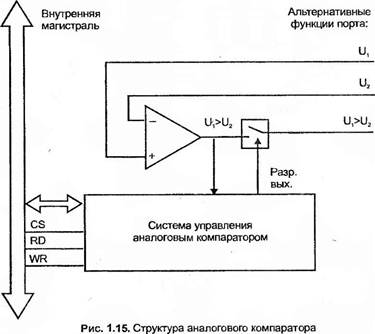
Принцип работы АК основан на использовании дифференциального усилителя без обратной связи в ключевом режиме. Данное периферийное устройство использует внешние линии МК для ввода/вывода данных, как правило, задействуй для этого разряды некоторого порта в режиме альтернативных функций.
Результат сравнения доступен в виде флага признака в регистре данных системы управления и, кроме того, может быть скоммутирован на выходную линию МК для непосредственной передачи на объект результата сразнения сигналов.
Помимо собственно задачи сравнения двух аналоговых величин, АК можно использовать в качестве простейших АЦП с ограниченными возможностями, если в качестве одного из UBX использовать генератор с известной характеристикой (например, генератор линейно нарастающего напряжения, реализованный на внешнем счетчике, тактированием которого управляет МК, или RC-цепь с известной постоянной времени, заряжаемом/разряжаемой до уровня лог. "1"). Аналого цифровые преобразователи (АЦП) служат для ввода информации, представленной аналоговым сигналом, в цифровую двоичную систему.
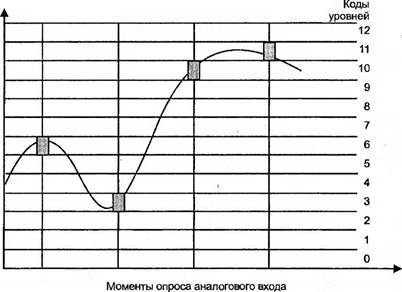
Рис. Принцип аналого-цифрового образования
Принцип аналого-цифрового преобразования заключается в разбиении полного диапазона значений аналогового сигнала на N поддиапазонов и сопоставлении входному сигналу кода уровня, покрывающего собой этот сигнал (рис.). При построении АЦП могут быть использованы различные методы. В МК подавляющее большинство АЦП строится на основе метода последовательного приближения с применением ЦАП и взвешивающего регистра сдвигов (рис.).
Функционирование такого АЦП осуществляется следующим образом: запуск предваряется инициализацией (путем подачи импульса "Reset"), по окончании которой во всех Т-триггерах и взвешивающем сдвиговом регистре находятся нули. Сразу по окончании инициализации подается сигнал "Пуск", заносящий уровень логической "1" в триггер старшего разряда. С приходом импульса опорной последовательности FTAKT в старший разряд сдвигового регистра также поступит уровень логической "1", после чего сигнал "Пуск" снимается. На ЦАП поступает цифровой код Nmax/2, приводящий к установке Uon = (Uonмакс-Uon мин)/2. Полученный уровень сравнивается аналого- иым компаратором с входной измеряемой величиной; в случае сравнения на выходе компаратора устанавливаегся уровень логической "I"
В этом случае вентиль "И" будет открыт, что приведет к сбросу триггера старшего разряда. Далее будет установлен следующий триггер и произведена проверка наличия следующего слагаемого. Если условие не выполняется на выходе аналогового компаратора устанавливается уровень логического "О", соответствующий вентиль "И" после сдвига в регистре не откроется, и указанный разряд сохранится в выходном коде. Процесс повторяется до момента перехода бегущей единицы в младший разряд сдвигового регистра, после чего генерируется сигнал "Конец преобразования", сдвигивзвешивающем регистре прекращаются, а на выходах "Код уровня" будет находиться цифровой двоичный код aN...a0, соответствующий измеряемой величине. Время преобразования АЦП постоянно и определяется числом разрядов и частотой сдвигов; погрешность определяется погрешностью ЦАП и чувствительностью компаратора.
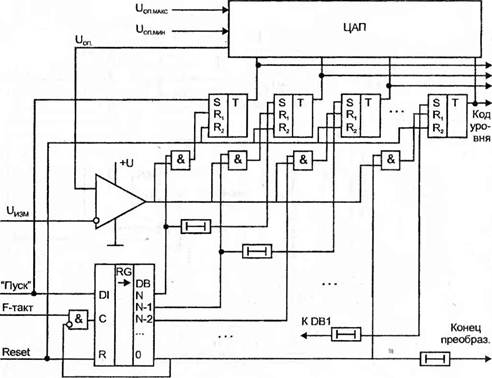
Рис. Структура блоке АЦП последовательного приближения
Настройки системы управления блоком АЦП позволяют осуществить выбор канала аналогового входа (являющегося альтернативной функцией входа некоторого порта), задать диапазон измеряемых величин и определить момент начала преобразования. После активизации флага готовности прикладная программа может осуществить чтение регистра данных АЦП.
Средства поддержки межпроцессорного обмена
Средства поддержки межпроцессорного обмена применяются для построения распределенных систем. В связи с тем, что практически всегда для построения таких систем используется последовательная передача данных, средства поддержки межпроцессорного обмена часто именуются последовательными портами ввода-вывода. К причинам выбора последовательного метода передачи данных относятся следующие: необходимость обеспечения надежной передачи данных при существенной территориальной протяженности канала передачи, необходимость снижения затрат на кабельное хозяйство с учетом относительно невысокой интенсивнисти обмена, а также необходимость обеспечения передачи данных по различным протоколам на основе единой аппаратной реализации.
К основным причинам использования распределенных систем относятся:
территориальная распределенность объекта управления (в этом случае эффективным является решение построения управляющей вычислительной сети из нескольких МК, решающих задачи локального управления и обмениьающихся информацией о характере этого управления для сохранения единства целей);
иерархичность системы управления (в случае использования человеко- машинных систем управления необходимо осуществлять передачу информации об установках оператора от операторской станции к МК (или к сети МК), а в обратном направлении — о показаниях датчиков, параметрах управления в МК и др.);
потребность в отладке системы на базе МК с применением инструментальных средств (в оснозном, инструментальных ЭВМ) в ходе реализации целевой функции МК (в этом случае необходимо реализовать возможность доступа к ресурсам МК, не блокируя штатные средства ввода- вывода МК, занятые для реализации процесса взаимодействия с объектом)
Номенклатура средств межпроцессорного обмена достаточно широка. К универсальным средствам относятся интерфейсы UART (Universal Asynchronous Receiver and Transmitter— универсальный асинхронный приемопередатчик), SSI (Synchro nous Serial Interface — синхронный последовательный интерфейс) и его разновидность SP (Serial Peiipherial Interface— последовательный периферийный интерфейс). К средствам по вдержки обмена в управляющих вычислительных сетях относятся IC (Inter-Integrated Circuit— межсхемный интерфейс) и CAN (Contollers Area Network— сеть контроллеров). К средствам поддержки отладки относятся интерфейсы J А (lest Access). Блок содержит сдвиговые регистры передатчика и приемника, позволяющие преобразовывать данные из последовательного представления в параллельное. Оба регистра имеют входы сброса R (Reset) и разрешения работы Е (Enable), а регистр передатчика— вход разрешения параллельной загрузки. I(ходы синхронизации С (Clock) сдвиговых регистров являются независимыми и могут принимать такты сдвига как от внешнего синхросигнала, так и от внутреннего источника, использующего счетчик/делитель частоты Fosc с программируемым коэффициентом деления (в ряде случаев в качестве такого счетчика может использоваться таймер общего назначения). Синхросигналы в общем случае поступают на внешнее устройство.
И передатчик, и приемник связаны с буфером, доступным для записи и чтения программой МК. При записи в буфер его содержимое дополнительно копируется в передатчик, после чего побитно выводится через выходную линию. Окончание накопления (флаг ovf) регистрируется в системе управления и может быть обнаружено программно. При попытке чтения буфера в него копируется содержимое приемника, после чего становится доступным на внутренней шине. (Следует отметить, что для достоверного чтения посылки прежде необходимо проконтролировать наличие флага ovf от приемника.) Начало посылки обнаруживается триггером.
Функционирование любой вычислительной системы (в том числе на базе МК), как правило, предполагает обслуживание некоторого ряда событий. Место и причина их возникновения могут быть достаточно разнообразными, однако эти события обладают одним общим свойством — момент их возникновения заранее неизвестен. В связи с этим, в вычислительной системе необходимо предусмотреть средства обнаружения этих событий с тем, чтобы по факту их обнаружения предпринять некоторые действия по их обслуживанию. При обслуживании события следует отложить ("прервать") выполнявшуюся программу и выполнить обслуживающую программу, поэтому такие события называются прерывающими событиями.
Наиболее простым способом обнаружения прерывающих событий является периодическая проверка факта их возникновения программным способом, что имеет два существенных недостатка: снижение производительности вычислительной системы (некоторая часть программы будет отведена под перебор признаков возникновения событий); наличие задержки между моментом возникновения события и моментом его обнаружения (в ряде случаев, например в системах реального времени, принципиально недопустимая).
Исключение указанных недостатков возможно лишь в случае аппаратного обнаружения заданных прерывающих событий, что реализуется посредством системы обслуживания прерывающих событий (кратко — "система прерываний"). Помимо обнаружения прерывающих событий, на систему прерываний возложен арбитраж событий для определения наиболее приоритетного из них.
Прерывающие события имеют и программную, и аппаратную природу:
к программным причинам возникновения прерывающих событий относятся: попытка выполнения несуществующих команд (т. е. таких, чей КОП отсутствует в системе команд данного МК) или выполнение команд с недопустимыми данными (например, в случае деления на ноль);
к аппаратным причинам возникновения прерывающих событий относятся: готовность периферийных модулей (например, окончание преобразования в АЦП, переполнение таймера, прием посылки по последовательному порту и т. п.) и активизация сигналов, поступающих на МК извне от объекта управления (например, двоичный сигнал от датчика срабатывания исполнительного механизма).
Количество прерывающих событий ограничено (так, количество внешних прерывающих событий не может превышать числа линий ввода-вывода МК), поэтому все они могут быть индивидуально обнаружены аппаратными средствами. Напротив, действия по их обслуживанию определяются целевой функцией МК и могут быть достаточно разнообразными, в связи с чем прерывающие события, как правило, обслуживаются программными средствами. Исключение составляют ситуации, связанные с пересылками данных (например, помещение очередного результата аналого-цифрового преобразования в заданную ячейку массива данных), выполняемые по заранее заданной схеме действий аппаратно в режиме прямого доступа к памяти (ПДП) (модули обслуживания такого типа называются PTS— Peripheral Transaction Servers — периферийные серверы транзакций).
Суть обработки прерывающего события сводится к следующим действиям:
обнаружение факта прерывающего события; установление необходимости реакции на него (т. к. не все из потенциально возможных прерывающих событий необходимы для реализации данной целевой функции МК, например, может не потребоваться обработка запроса прерывания от АЦП, работа с которым осуществляется путем выдержки паузы);
выполнение арбитража событий (в случае возникновения нового прерывающего события в момент обслуживания предыдущего прерывающего события, в зависимости от степени важности в них событий следует либо продолжить начатое обслуживание, либо прервать его, переключившись на обслуживание нового);
выполнение переключения программного контекста (сохранение состояния прерываемой программы и переключение на программу обслуживания, адрес которой заранее однозначно сопоставлен типу прерывающего события (так называемый "вектор прерывания" или "точка входа в обработчик");
выполнение восстановления программного контекста (восстановление состояния прерванной программы и обратное переключение на нее).
Обобщенная схема системы прерываний показана на рис.
Обработка прерывающих событий от любого источника может быть индивидуально запрещена ("замаскирована") записью лог. "0" в регистры масок (за исключением особо важных, так называемых "немаскируемых событий", для которых в регистре масок всегда занесена лог. " 1"). Кроме того, каждому источнику может быть сопоставлен один из К уровней приоритетов записью соответствующего кода в регистры приоритетов, управляющих коммутаторами входов приоритетного шифратора. (Так как количество прерывающих событий может превышать разрядность МК, то для индивидуального маскирования и кодирования приоритетов может требоваться несколько регистров; на рисунке показано по одному регистру масок и приоритетов.) Каждое прерывающее событие запоминается в фиксаторе события своего типа. В случае наличия нескольких зафиксированных событий благодаря использованию приоритетного шифратора на вход памяти таблицы векторов будет подан код самого старшего прерывающего события, а на выходах таблицы будет находиться адрес точки входа в обработчик прерывающего события данного типа.
Перед занесением данного адреса в указатель команд процессора ядра МК необходимо выполнить микропрограмму сохранения контекста прерываемой программы. Для этого в модуле обработки прерывающих событий имеются регистр-указатель адреса ПДП (адресует ячейку области памяти данных), регистр данных ПДП (хранит содержимое адресуемой ячейки) и ОЗУ команд ПДП (хранит последовательность действий сохранения контекста). С их помощью аппаратно считывается содержимое регистров контекста и сохраняется в специальной области памяти данных МК. Для того чтобы по окончании обработки прерывающего события вернуться к прерванному контексту, как минимум, необходимо сохранить указатель команд (остальные ресурсы могут быть сохранены программно в обработчике события). Как правило, для удобства сохранения и восстановления контекста используется стек.
По окончании обработки события (завершающегося, как правило, специальной командой, при выполнении которой процессор ядра посылает в систему управления обслуживания прерывающих событий специальный сигнал) в случаях однозначной и несложной обработки события (типа пересылки данных из ячейки в ячейку), такие действия могут быть выполнены полностью аппаратно, в простом режиме. При подготовке этих действий и ипициализации обслуживания прерывающих событий в ОЗУ команд ПДП основном программой записывается управляющий блок, описывающий будущую процедуру аппаратных пересылок. Приблизительный формат управляющего блока таков: "начальный адрес источника данных", "начальный адрес приемника данных", "количество повторений пересылок", "признак необходимости изменения адреса источника", "направление изменения адреса источника", "величина изменения адреса источника", "признак необходимости изменения адреса приемника", "направление изменения адреса приемника", "величина изменения адреса приемника". Используя эти поля, можно организовать одиночную и групповую пересылку данных по разным направлениям адресов в памяти и с различным шагом этих адресов.
Проектирование микроконтроллерных систем для специализированного технологического оборудования использующего источник концентрированных потоков энергии
Проектирование — комплекс мероприятий, обеспечивающих поиск технических решений, удовлетворяющих заданным требованиям, их оптимизацию и реализацию в виде комплекта конструкторских документов и опытного образца (образцов), подвергаемого циклу испытаний на соответствие требованиям технического задания.
Процесс разработки любого изделия состоит из трех основных этапов: научно-исследовательской работы (НИР), опытно-конструкторской работы (ОКР); производства.
Все эти этапы входят в жизненный цикл изделия (рис.).
Этап НИР предназначен длг определения принципиальной возможности и целесообразности разработки системы; по окончании этапа либо осуществляется постановка технического задания Т3 на ОКР, либо дается мотивированное обоснование ее невозможности или нецелесообразности. Основными критериями оценки являются: величина ожидаемой прибыли, степень риска производителя, длительность жизненного цикла продукции, доступность необходимых трудовых и материальных ресурсов, возможность производства по конкурентоспособным ценам и др.
Процесс выполнения НИР и ее основные стадии показаны на рис.
ТЗ описывает основное назначение, технические характеристики, показатели качества и технико-экономические требования, предъявляемые к системе.
После завершения НИР при условии положительных результатов анализа предложения на разработку проводятся опытно-конструкторские работы

Конструкторская документация, опытные образцы
Рис.. Жизненный цикл изделия
(ОКР). Основная задача ОКР — создание комплекта конструкторской документации для серийного производства изделия.
Процесс выполнения ОКР и ее основные стадии показаны на рис.
Обеспечение производства включает в себя три составляющие:
конструкторское обеспечение (адаптация конструкторской документации ОКР к условиям конкретного серийного производства предприятия- изготовителя. Производится в соответствии с правилами "Единой системы конструкторской документации" (ЕСКД));
технологическое обеспечение (обеспечение технологической готовности предприятия к производству; разработка технологических маршрутов и процессов; сопровождение изготовления. Производится в соответствии с правилами "Единой системы технологической подготовки производства" (ЕСТПП));
организационное обеспечение (расчеты хода производства, загрузки оборудования, движения материальных потоков; обеспечение кадрами, оборудованием оборудованием, материалами, полуфабрикатами, финансовыми средствами; проектирование участков и цехов, планировка расположения оборудования).
Вопросы сбыта продукции находятся в компетенции отделов рекламы и сбыта предприятия, изучаются в разделе "менеджмент" экономических дисциплин и в настоящем пособии не рассматриваются.
Описание проекта, идем
| подготовительная | |
| Г | |
| теоретическая | |
| Г | |
| экспериментальная | |
| аналитическая | |
| Г |
Специфика проектирования встраиваемых приложений
Обобщенная встраиваемая система управления на базе микроконтроллера, структура которой показана на рис., включает в себя:
объект управления, содержащий исполнительные устройства, собственно объект или процесс, и систему датчиков, предоставляющих информацию об объекте управления;
микроконтроллерную систему управления, реализующую процесс управления объектом, заключающийся в сообщении объекту воздействий в соответствии с алгоритмом решаемой задачи и информацией, поступающей с датчиков контролируемых величин и с пульта управления системой;
блок сопряжения с объектом управления, заключающий в себе унифицированный набор элементов, реализующих функции согласования сигналов (как управляющих, так и информационных) стандартов микроконтроллерной системы и объекта управления;
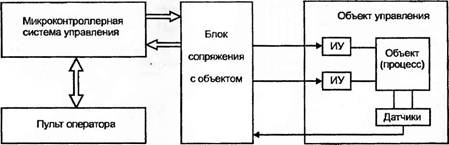
Рис. Структура системы управления на базе микроконтроллера
|
|
|
|
|
Дата добавления: 2014-12-10; Просмотров: 3570; Нарушение авторских прав?; Мы поможем в написании вашей работы!