КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Управление шаговыми двигателями
|
|
|
|
Особенностью систем на основе шаговых двигателей является дискретная форма представления управляющих сигналов. При подаче на обмотки двига- теля кодовой комбинации напряжений вал двигателя смещается на шаг, определенный конструкцией привода. Это позволяет применять такие приводы в системах позиционирования, т. к. до выдачи новой кодовой комбинации угол поворота ротора не меняется (при воздействии на вал нагрузок в допустимом диапазоне значений). При управлении шаговым двигателем по скорости необходимо переключать кодовые комбинации с частотой, зависящей от требуемой частоты вращения вала, а при управлении по положению — переключать комбинации на заданное количество шагов. Кодовые комбинации должны меняться в строго определенной последовательности для обеспечения правильного изменения электромагнитного поля, при этом между их сменами должен выдерживаться интервал, определяемый механической и электромагнитной инерционностью двигателя.
Схема аппаратуры системы управления шаговым двигателем (ШД) показана на рис..
Двоичные коды, определяющие коммутируемые обмотки, по которым будет поотекать ток, поступают с четырех (по числу фазных обмоток) старших разрядов порта Р1 на схему сопряжения, состоящую из интегрального усилителя КР1128КТ4, обеспечивающего усиление мощности выходных сигналов порога до уровня, способного уверенно управлять транзисторными ключами КТ827А. Код логической " 1" обеспечивает протекание тока через обмотку двигателя, код логического "О" блокирует протекание тока. Для быстрого гашения переходных процессов, возникающих в силу индуктивности обмотки при выключении транзисторного ключа, в схему введены демпфирующие диоды.
Наиболее распространенным способом переключения обмоток является гак называемая парная коммутация, при использовании которой в каждый момент времени ток протекает через две фазные обмотки. Разрешенными ком бинациями парных обмоток являются две соседние по номеру обмотки: 1 я и 2-я, 2-я и 3-я, 3-я и 4-я, 4-я и 1-я. Переключение между ними должно происходить строго последовательно, от комбинации к комбинации; этим доспи а- егся необходимое для вращения двигателя вращение электромагнитного поля. Таким образом, для вращения в одном направлении на обмотки должны поступать последовательности кодов: "0011, 0110, 1100, 1001, 0011" и т. д., а для вращения в противоположном направлении комбинациями должны быть "0011, 1001, 1100, 0110, 0011" ит. д Алгоритмически это означает выполнение операции "циклический сдвиг влево" или "циклический сдвиг вправо" над тетрадой с исходным значением "0011" (рис.

Схема программы частотного управления ШД с таблично программируемыми изменениями частоты вращения показана на рис., а ее текст— в листинге
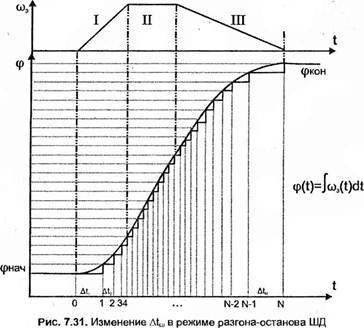
Для придания примеру достаточной общности положим, что управление ШД должно происходить таким образом, чтобы во времени развертывалась некоторая заранее заданная траектория изменения частоты (рис.).
При большой нагрузкой с целью предотвращения выпадения из синхронизма, вполне возможного при скачкообразных изменениях частоты).
Очевидно, что мгновенное значение угла поворота ротора определяется интегрированием W3 по времени; при этом, т. к. ШД отрабатывает поворот ротора на определенный конструкцией двигателя квант (ступенчатый график на рис.), то интервал времени, выдерживаемый между шагами, будет меняться нелинейным образом: на участке I интервал времени сокращается (шаги ускоряются); интервал, достигнутый в конце участка I, выдерживается на участке II (движение с постоянной скоростью); наконец, на участке III интервал времени между шагами увеличивается (шаги замедляются). В данном примере ускорения разгона и торможения различны.
Таким образом, траектория движения будет однозначно определена заданием начального положения ротора, количества шагов и набора значений для всех шагов траектории. Расчет интервала следующего шага может осуществляться как после выполнения предшествующего шага, так и заранее. В последнем случае в памяти управляющего, контроллера можно хранить совокупность (возможно, пополняемую) таблиц длительностей и по мере надобности переключаться между различными траекториями (типами) движения.
В приведенном программном примере имеется одна таблица, расположенная в памяти с адреса метки step freq, описывающая траекторию, состоящую из 128 шагов. В таблице хранятся коды длительностей интервалов, отмеряемых таймером Т1. Вопрос согласования необходимого диапазона выдерживаемых интервалов между шагами (иными словами, диапазона частот wM|N... wMAx) с квантом счета таймера Т1 решается следующим образом. Потребная частота коммутации обмоток ШД лежит в диапазоне от десятков герц до долей герца, а интервалы, отмеряемые таймером, лежат в диапазоне от десятков микросекунд до десятков миллисекунд. В связи с этим необходимо увеличивать интервалы, генерируемые таймером, в некоторое количество раз (в данном примере коэффициент "растяжки", исходя из заданного диапазона частот, равен 3): Такой прием сокращает размер таблицы, т. к. уменьшается длина кодового слова, задающего интервал выдержки времени.
Необходимое направление вращения задается старшим битом кода управления. В байте step phase хранится код коммутации обмоток.
Флаг позволяет программе верхнего уровня "включать" и "выключать" ШД. Генерируемый программой управления ШД признак информирует программу верхнего уровня о достижении конца траектории. Для корректной работы таймер Т1 должен быть настроен в режим 16-битного счета н разрешена обработка запросов прерываний от него, передающая управление на адрес метки.
Использование таблично заданных траекторий движения открывает широкие возможности для управления двигателями любых типов. Так, например, для случая управления ДПТ по частоте, в таблице будут храниться коды ШИМ (определяющие частоту вращения двигателя), извлекаемые из нее через равные интервалы времени, задающие квант скорости изменения частоты вращения. В более сложных случаях в таблице можно хранить и код ШИМ, и код интервала времени действия этого кода.
Разработка Типовых регуляторов
В реальных технических системах отработка объектом выдаваемых на него управляющих воздействий выполняется принципиально неидеально вследствие действия ряда возмущающих факторов. В электромеханических системах к таким факторам относятся непостоянство нагрузки (момента сопротивления) во времени, искажения управляющих сигналов под воздействием электромагнитных помех и др. В связи с этим обеспечение качественного выполнения системой заданных эволюций возможно лишь при наблюдении за состоянием объекта и определении степени отклонения значений наблюдаемых параметров от заданных значений (уставок) с целью коррекции подаваемых на объект управляющих воздействий для обеспечения требуемого качества отработки заданной траектории. Решение задач таксго рода возлагается на регуляторы.
Типовой вариант организации программных компонентов встраиваемой системы управления с применением программных регуляторов показан на рис..
Цель функционирования
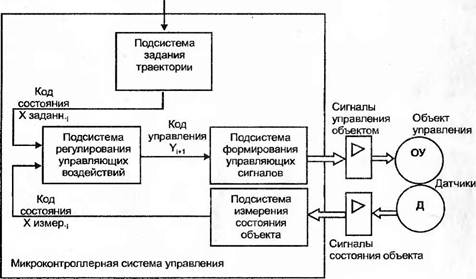
Рис. Использование программных регуляторов в МК-системе
В данной схеме подсистема задания траекторни, в соответствии со сформированной извне (на более высоком иерархическом уровне управления) целью функционирования системы в целом, через каждый очередной квант времени генерирует требуемый вектор состояния объекта ХЗАДН (в виде соответствующей кодовой комбинации). Подсистема измерения выделяет из физических сигналов, поступающих с датчиков, информацию о векторе состояния объекта ХИЗМЕР (также в виде кодовой комбинации). Задачей регулятора является вычисление такого управления Y (в виде кодового слова, преобразуемого далее формирователем в физические управляющие сигналы U), которое бы переводило объект в новое состояние X с наперед заданной степенью близости к ХЗАДЛНН. Следует отметить, что это управляющее воздействие объект также отработает неидеально. Таким образом, функционирование такой системы управления заключается в постоянном слежении за состоянием объекта в целях минимизации отклонения от заданной траектории.
Итак, регулятор вычисляет некоторую функцию Y(X3AД, ХИЗМЕР, t,...), где, помимо информации, описывающей текущую ситуацию (это аргументы ХЗЛЛЛИН и ХИЗМЕР), в качестве дополнительных параметров могут присутствовать аргументы, описывающие поведение системы на некотором отрезке времени — это либо значение системного времени t, либо производные и/или интегралы мгновенных значений ХЗАДАИН, ХИЗМЕР и соотношений между ними.
Определение критериев качества управления производится при подаче в виде уставок определенных тестовых значений. Зачастую рассматривается реакция системы на ступенчатое входное воздействие и оцениваются ее статические (установившаяся ошибка рассогласования) и динамические (время переходного процесса, колебательность) параметры (рис.).

Множество функций Р(ХЗАДАШ, Хизмер, t,...), определяющих принцип действия регуляторов, довольно разнообразно: от простейших пропорциональных регуляторов ("П-регуляторов") до так называемых "неаналитических", например, нечетких регуляторов.
Рассмотрим программную реализацию широко применяемого в классической теорий управления обобщенного пропорционально-интегрально-дифференциального регулятора (ПИД регулятора) описываемой зависимостью вида:
Преобразуем приведенную зависимость в разностное уравнение, учитывая необходимость реализации указанной функции на вычислительной системе, обладающей дискретностью по времени с периодом квантования т, так что время в системе отсчитывлется величинами n, 2n, Зn... nт,... (в записи удобнее пользоваться номером n кванта).
п
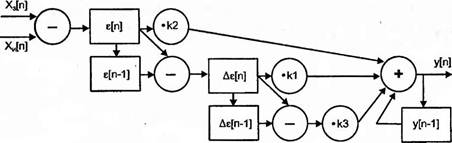
Рис. Граф организации вычислений в подпрограмме регулятора
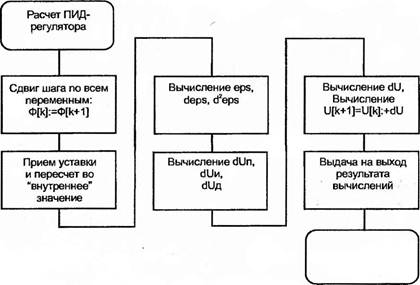
Рис. Схема подпрограммы регулятора
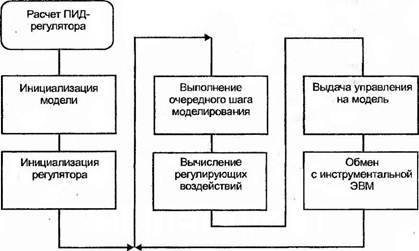
Рис. Схема программы ' Регулятор — модель объекта"
На рис. показаны результаты испытаний системы.
Из графиков хорошо видно, что разомкнутая (без регулятора) система не в состоянии обеспечить требуемую реакцию на управление. Попытка добиться совпадения уставки и выхода объекта (модели) путем использования лишь П-составляющей не устраняет установившуюся ошибку; дальнейшее увеличение Кп переводит управляющие воздействия в состояние насыщения с последующим неадекватным поведением регулятора. В то же время, при использовании И-составляющей возможно обеспечение практически нулевой установившейся ошибки, а применение Д-составляющей позволит обеспечить форсированное стремление выхода объекта к уставке при ее резких изменениях.
В случае использования реального объекта, для обеспечения шага счета регулятора, согласованного с собственными постоянными времени объекта, применяется таймер, выставляющий в обработчике запроса прерывания по переполнению флаг, означающий наступление очередного момента расчета. Обмен данными с инструментальной ЭВМ также ведется по запросам на прерывание.
|
|
|
|
|
Дата добавления: 2014-12-10; Просмотров: 1076; Нарушение авторских прав?; Мы поможем в написании вашей работы!