КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Управление двигателями постоянного тока
|
|
|
|
Одним из наиболее применяемых в автоматике типов электродвигателей является двигатель постоянного тока (ДПТ), характеризующийся простотой управления, удобством аналитической модели, линейностью характеристик в широком диапазоне условий эксплуатации. Рассмотрим реализацию управления ДПТ, обеспечивающую управление частотой вращения двигателя с возможностью смены направления вращения (реверсом).
Достаточно высокая по сравнению с быстродействием управляющего микроконтроллера инерционность электродвигателей, в основном определяемая механическими и конструктивными особенностями и составляющая, как правило, десятки (и более) миллисекунд, позволяет использовать для управления не аналоговый сигнал, от амплитуды которого линейно зависит желаемая частота вращения, а широтно-импульсно-модулированный сигнал, в котором для изменения со соответствующим образом изменяется соотношение Тимпульса/Тпаузы. В сущности, изменение этого соотношения (соответственно и мощности, передаваемой на двигатель за период действия ШИМ-сигнала) эквивалентно изменению уровня аналогового напряжения управления (рис.). Сглаживание импульсов ШИМ происходит за счет инерционности объекта управления.
Схемотехническая реализация устройства сопряжения микроконтроллера с ДПТ показана на рис..
ШИМ-сигнал необходимой скважности снимаемся с контакта Р1.1, представляющего собой выход канала блока быстрого ввода-вывода, обсспсчивающего при соответствующей программной настройке формирование ШИМ. Знак, определяющий направление протекания тока через обмотку ДПТ, задается контактом Р3.5 микроконтроллера MCU. На вентилях "НЕ" и "2И" реализован узел, обеспечивающий наложение знака на ШИМ-сигнал, а микросхема КР1128КТЗА предназначена для усиления мощности управляющих сигналов. Временные диаграммы работы узла показаны на рис.
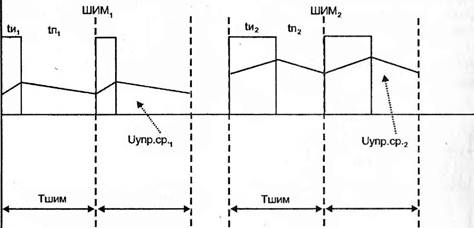
Рис Сигналы ШИМ-управления
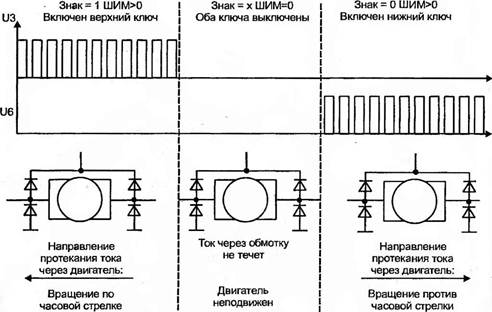
Рис. Временные диаграммы работы устройства сопряжения с ДТП
Микросхема КР1128КТЗА идентична по цоколевке и параметрам микросхеме КР1128КТ4, но, в отличие от нее, коммутирует большие токи (до 1 А постоянного тока на фазу) и требует при подключении индуктивной нагрузки применения внешних диодов, что и выполнено в примере.
Отметим, что возможен вариант аппаратной реализации, в котором для управления используются не один, а два канала ШИМ, при этом операции наложения знака на ШИМ-сигнал выполняются программно: на одном канале осуществляется генерация ШИМ, на другом такая генерация блокируется (формируется логический ноль). Такая организация позволяет исключить из схемы вентили "НЕ" и "2И", однако расходует важный ресурс МК— каналы ШИМ. Степень оптимальности вариантов решений должна определяться в каждом случае применения индивидуально.
Положим, что переменная управления, формируемая извне (например, подпрограммой-регулятором), определена в следующем формате: младшие 7 бит переменной управления кодируют интенсивность ШИМ-сигнала, а старший - его знак.
Поскольку ограничение сверху на частоту ШИМ-сигнала не накладывается (имеется лишь ограничение снизу: важно, чтобы она была на порядок выше собственный частоты объекта управления), выберем частоту максимальной из удобных. Для этого проинициализируем регистр перезагрузки таймера кодом FF80h. Таким образом, для корректной отработки ШИМ-сигналов регистр данных канала должен содержать значения в диапазоне FF80h—FFFFh, т. е., управление скважностью производится значениями младшими семью битами младшего байта регистра данных (и только ими). Удобство реализации очевидно — отделив из кода управления знаковый разряд и передав его на разряд Р3.5, оставшиеся 7 бит (кодируют диапазон 00-—7Fh) необходимо добавить к коду 80h (минимальное значение младшего байта регистра каната) и занести результирующее значение в младший байт регистра данных канала.
Управление вентильными двигателя
Вентильные двигатели (ВД)— иное название "бесконтактные" — принципиально отличаются от последних отсутствием механического устройства распределения токов по частям обмоток ротора (коллектора): ее роль выполняют транзисторные ключи соотвегстующей мощности, пере ключающиеся по командам устройства управления, определяющего текущее положение ротора. Достоинства данного решения очевидны: увеличиваются надежность и долговечность работы двигателя за счет уменьшения количества трущихся деталей, снижаются взрыво- и пожароопасность за счет отсутствия искрения при коммутации (в ДПТ больших мощностей искрение на щетках весьма велико, что исключает их применение в атмосфере, насыщенной кислородом, водородом и другими взрывоопасными газами и парами без громоздких приспособлений, снижающих риск взрыва).
Рассмотрим вариант построения системы управления ВД с ротором в виде восьмиполюсного постоянного магнита, оборудованного фотоэлектрическим датчиком положения (рис). Обмотки А, В, С расположены на статоре со сдвигом на 30°. Выходной код, считываемый с датчика положения ротора, однозначно определяет для внешнего наблюдателя номер текущей фазы — положения ротора ВД.
Для формирования магнитного поля, обеспечивающего вращение ВД, сигналы датчиков k, l, m в парафазном виде поступают на коммутатор, состоящий из шести транзисторных ключей. Каждый цикл работы коммутатора обеспечивает поворот ротора на 90° и состоит из шести фаз, в каждую из которых включены два параллельных и один последовательный ключ. Временные диаграммы работы ключей и результирующие фазные напряжения обмоток показаны на рис..
Крыльчатка датчика положения ротора
| Фаза | k I m | |
| б | ||
Прототип схемотехнической реализации устройства сопряжения с ВД показан на рис.. В качестве усилителя используется аналог коммутатора микросхема L298N, обладающая более высокими порогами переключения по входным сигналам, что позволяет использовать сигналы, непосредственно сформированные выходами оптопар фотоэлектрического датчика.
Коммутация производится так, чтобы угол между потоками якоря и возбуждения составлял 15°. В результате взаимодействия этих потоков создается вращающим момент, стремящийся развернуть ротор в согласованное положение, но при повороте ротора коммутатор по сигналам с фотоэлементов выполняет переключение обмоток, и поток якоря поворачивается на следующий шаг Изменением амплитуды питания обеспечивается различная скорость движения ротора к очередному согласованному положению. Таким образом, используя широтную модуляцию, можно управлять частотой вращения двигателя. Схема программы-драйвера и ее текст аналогичны рассмотренным для двигателя постоянного тока; отличие заключается лишь в отсутствии задания и анализа направления вращения, т. к. этот параметр системы в данной схеме задан аппаратно и не изменяется.
|
|
|
|
|
Дата добавления: 2014-12-10; Просмотров: 1068; Нарушение авторских прав?; Мы поможем в написании вашей работы!