КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Протокол №1 від 31.08.2010 року
|
|
|
|
Пример
В каждый момент времени для механической системы с идеальными удерживающими связями сумма работ всех активных сил и всех сил инерции на любом возможном перемещении системы равна нулю.
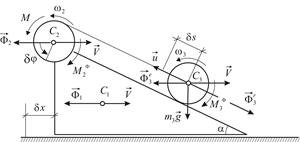
Призма массы  может скользить по идеально гладкой горизонтальной поверхности. В вершине призмы закреплена ось барабана лебедки. Конец троса прикреплен к оси катка, который катится без скольжения по боковой поверхности призмы. Барабан лебедки и каток — сплошные однородные цилиндры одинаковой массы
может скользить по идеально гладкой горизонтальной поверхности. В вершине призмы закреплена ось барабана лебедки. Конец троса прикреплен к оси катка, который катится без скольжения по боковой поверхности призмы. Барабан лебедки и каток — сплошные однородные цилиндры одинаковой массы  и одинакового радиуса
и одинакового радиуса  . К барабану лебедки приложен постоянный вращающий момент
. К барабану лебедки приложен постоянный вращающий момент  . Составить дифференциальные уравнения движения системы.
. Составить дифференциальные уравнения движения системы.
|
| Рис.8.3 |
Силовая и кинематическая схемы представлены на Рис.8.3. Общее уравнение динамики в рассматриваемом случае имеет вид:


Система имеет две степени свободы. В качестве независимых координат примем координату призмы  и относительную координату оси катка
и относительную координату оси катка  . Кинематические условия, налагаемые связями, имеют вид:
. Кинематические условия, налагаемые связями, имеют вид: 
Отсюда:  и
и 
Учитывая, что



получаем общее уравнение динамики в виде:


Поскольку возможные перемещения  и
и  могут принимать любые значения и не зависят друг от друга, общее уравнение динамики распадается на систему двух дифференциальных уравнений относительно координат и :
могут принимать любые значения и не зависят друг от друга, общее уравнение динамики распадается на систему двух дифференциальных уравнений относительно координат и :


Конспект лекцій розроблений на основі програми затвердженої головним управлінням кадрової політики і аграрної освіти Мінагропрому України від 13 травня 1998 року і у відповідності до навчального плану підготовки фахівців освітньо-кваліфікаційного рівня «бакалавр», з напряму підготовки 6.100102 «Процеси, машини та обладнання агропромислового виробництва»
Рецензенти: Гевко Б.М., д.т.н., професор,завідувач кафедри технології-машинобудування Тернопільського національного технічного університетуім. Івана Пулюя.;
Павліський В.М., д.т.н., професор кафедри енергетичних машин та технічного сервісу в АПК ВП НУБіП України «Бережанський агротехнічний інститут »
М.М. Нікітін, доцент, к.т.н. ВП НУБіП України «Бережанський агротехнічний інститут».
Розглянуто і схваленокафедрою енергетичних машин та технічного сервісу в АПК ВП НУБіП України «Бережанський агротехнічний інститут»
Протокол № 10 від 25.06. 2010р.
© Чвартацький І.І.
Чвартацький І.І.
Навчальне видання
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 417; Нарушение авторских прав?; Мы поможем в написании вашей работы!