КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Темы рефератов 2 страница
|
|
|
|
Наиболее широкое распространение получили регуляторы непрерывного действия, использующие линейные законы регулирования
 ,
,
где x вых.р - выходная величина регулятора;
xвх.р - его входная величина;
C1, C2, C3 - коэффициенты пропорциональности, называемые параметрами настройки регулятора;
t - время.
Сумма трех составляющих образует ПИД-закон регулирования. При отсутствии отдельных составляющих будут образовываться П-, И-, ПИ-, ПД-законы регулирования. В соответствии с реализуемыми законами регулирования регуляторы непрерывного действия делятся на различные типы.
1. Пропорциональные регуляторы, у которых выходная величина xвых.р связана с входной величиной xвх.р соотношением
xвых.р = kрxвх.р,
где kр - коэффициент передачи регулятора.
Передаточная функция П-регулятора имеет вид
Wп(p) = kр.
2. Интегральные регуляторы, у которых изменение выходной величины пропорционально интегралу изменения входной
 ,
,
где kр1 - коэффициент передачи И-регулятора, характеризующий скорость исполнительного механизма при отклонении входной величины.
Передаточная функция И-регулятора
Wи(p) = kр1/p.
3. Пропорционально-интегральные регуляторы, у которых изменение выходной величины пропорционально как изменению входной величины, так и интегралу ее изменения
 ,
,
где Tи - время изодрома.
Передаточная функция такого ПИ-регулятора
 .
.
4. Пропорционально-дифференциальные регуляторы, которые оказывают суммарное воздействие на регулирующий орган, пропорциональное как отклонению регулируемой величины, так и скорости ее отклонения
 ,
,
где Tп - время предварения.
Передаточная функция регулятора имеет вид
Wпд(p)=kр(1+Tпp).
5. Пропорционально-интегрально-дифференциальные регуляторы, у которых изменение выходной величины пропорционально отклонению регулируемой величины, интегралу этого изменения и скорости изменения этой величины
 .
.
Передаточная функция ПИД-регулятора
В соответствии с законами регулирования настройками этих регуляторов являются:
для П-регулятора - коэффициент передачи kp, % хода регулирующего органа/единица измерения регулируемой величины;
для И-регулятора - коэффициент передачи kр1, % хода регулирующего органа/с×единица измерения регулируемой величины;
для ПИ-регулятора - коэффициент передачи kp, % хода регулирующего органа/единица измерения регулируемой величины; время изодрома Tи, с;
для ПИД-регулятора - коэффициент передачи kp; время изодрома Tи, с; время предварения Tп, с.
Настройки непрерывных регуляторов П-, И-, ПИ-, и ПИД-действия позволяют получить любой из трех типовых оптимальных процессов регулирования: апериодический процесс с минимальным временем регулирования, с 20%-ным перерегулированием или процесс с минимальной квадратичной площадью отклонения с min òx2dt.
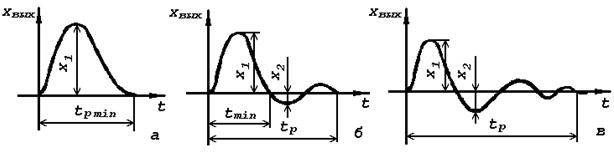
Рис. 1.13. Типовые переходные процессы регулирования
Апериодический процесс (граничный) с минимальным временем регулирования, кроме минимальной величины общего времени регулирования tр, характеризуется отсутствием перерегулирования и минимальным регулирующим воздействием. Применяют тогда, когда требуется минимальное время регулирования, перерегулирование не допускается, а динамическое отклонение x1 может быть сравнительно большим (рис. 1.13, а).
Процесс с 20%-ным перерегулированием и минимальным временем первого полупериода колебаний рекомендуется применять в тех случаях, когда допускают определенную величину перерегулирования, но предъявляют более жесткие, чем в предыдущем случае, требования к величине максимального динамического отклонения регулируемой величины (рис. 1.13, б).
Процесс с min òx2dt - процесс с минимальной квадратичной площадью отклонения характеризуется наибольшим перерегулированием (40 - 45%) и временем регулирования, а также наибольшим регулирующим воздействием, но и наименьшей величиной динамического отклонения (рис. 1.13, в).
Регулятор выбирается по известным характеристикам объекта регулирования и возмущения и при заданных требованиях, предъявляемых к качеству переходных процессов. Сначала следует выбрать тип регулятора, затем закон регулирования и соответствующие параметры его настроек.
С приемлемой для практических целей точностью большинство объектов регулирования в черной металлургии можно аппроксимировать статическим объектом с запаздыванием:
или астатическим объектом с запаздыванием
 .
.
Исходными данными для выбора регулятора являются:
1. Статические и динамические параметры объекта регулирования, определяемые по кривой разгона: чистое запаздывание tоб; постоянная времени Тоб; их отношение tоб/Тоб; коэффициент передачи koá.
2. Максимально возможные значения возмущений по нагрузке xвх, % хода регулирующего органа, - пиковых, скачкообразных длительных и непрерывных монотонных (при непрерывных возмущениях должна быть известна также максимальная скорость возмущения х'вх, %/с).
3. Требуемые показатели качества регулирования объекта. При установке регулятора непрерывного действия должны обеспечиваться: максимальное динамическое отклонение x1доп (единицах измерения регулируемой величины); допустимое или желаемое перерегулирование x2доп/x1доп, %; допустимое остаточное отклонение (статическая ошибка) Dxстдоп (единицах измерения регулируемой величины); предельно допустимое время регулирования tрдоп, с.
При инженерных методах выбора и расчета регуляторов закон регулирования и значение настроек регулятора могут быть определены по следующей методике:
1. Определить тип регулятора по величине отношения tоб/Tоб.
| tоб/Tоб | < 0.2 | < 1.0 | > 1.0 |
| Тип регулятора | Релейный | Непрерывный | Импульсный или непрерывный |
2. Рассчитать величину допустимого динамического коэффициента регулирования
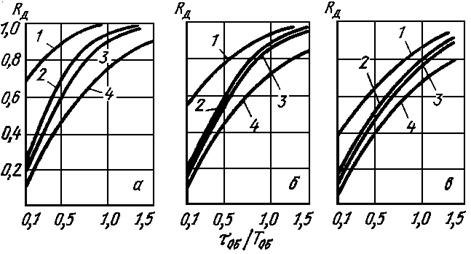
Рис. 1.14. Динамические коэффициенты регулирования на статических объектах при процессах: а - апериодическом; б - с 20%‑ным перерегулированием; в - с min òx2dt; 1 - И-регулятор; 2 - П-регулятор; 3 - ПИ-регулятор; 4 - ПИД-регулятор
3. По графикам Rд(tоб/Tоб), приведенным на рис. 1.14 для заданного типового оптимального процесса регулирования, выбрать простейший регулятор (закон регулирования), обеспечивающий при заданном значении tоб/Tоб значение динамического коэффициента регулирования Rд £ Rддоп.
4. По графикам, приведенным на рис. 1.15 для статических ОР, проверить, обеспечит ли выбранный регулятор допустимое время регулирования tр.

Рис. 1.15. Время регулирования на статических объектах:
а - апериодический процесс; б - процесс с 20%-ным перерегулированием; в - процесс с min òx2dt; 1 - 4 - соответственно И-, П-, ПИ, ПИД-регуляторы
5. Для П-регулятора, необходимо по рис. 1.16 найти величину статической ошибки, и если она больше допустимой, то вместо П-регулятора нужно установить более сложный регулятор.
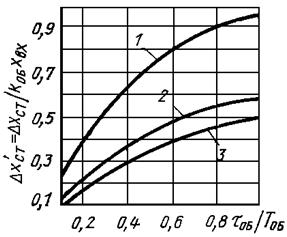
Рис. 1.16. Остаточное отклонение на статических объектах:
1 - апериодический процесс; 2 - процесс с 20%-ным перерегулированием; 3 - процесс с min òx2dt
6. Для выбранного регулятора подсчитать значения настроек по формулам, приведенным в табл. 1.10.
Табл. 1.10.
| Типовой переходной процесс | |||
| Регулятор | апериодический | с 20%-ным перерегулированием | с min òx2dt |
| И |  ; ;
|  ; ;
|  ; ;
|
| П |  ; ;
|  ; ;
|  ; ;
|
| ПИ |  ;
Ти = 0.6Тоб; ;
Ти = 0.6Тоб;
| ;
Ти = 0.7Тоб;
|  ;
Ти = Тоб; ;
Ти = Тоб;
|
| ПИД |  ;
Ти=2.4tоб; Тп=0.4tоб. ;
Ти=2.4tоб; Тп=0.4tоб.
|  ;
Ти=2.0tоб; Тп=0.4tоб. ;
Ти=2.0tоб; Тп=0.4tоб.
|  ;
Ти=1.3tоб; Тп=0.5tоб. ;
Ти=1.3tоб; Тп=0.5tоб.
|
При выполнении задания 2 необходимо разработать, рассчитать или сделать анализ функционирования отдельных технических средств АСУ ТП и АСР. Любую АСР можно разделить на отдельные элементы, выполняющие определенные функции. Расчет и анализ некоторых элементов и предлагается выполнить в заданиях этого раздела.
Прежде чем приступить к его выполнению, необходимо ознакомиться с разделом "Технические средства АСУ ТП " изучаемого предмета, освоить соответствующие разделы в рекомендуемой литературе, проанализировать примеры решения задач, имеющиеся в данных методических указаниях.
Варианты 2.01...2.10. Вывести формулу и построить график зависимости выходного напряжения потенциометрического преобразователя в функции положения его движка x. Рассчитать зависимость выходного напряжения Uн от перемещения x (Uвых=f(x)) при различных нагрузках Rн1, Rн2. Сделать вывод о влиянии нагрузки на характеристику измерительного преобразователя и оценить относительную погрешность. Схемы приведены на рис., а варианты задания в табл. 2.1.
Литература: /4/, с.14-16.
а) б)
Рис.2.1. Схемы потенциометрических преобразователей
Таблица 2.1.
| Вариант | рис. | З н а ч е н и е п а р а м а т р о в | ||||
| l, мм | R, Ом | Rн1, Ом | Rн2, Ом | Uп , В | ||
| 2.01 | а | |||||
| 2.02 | б | |||||
| 2.03 | а | |||||
| 2.04 | б | |||||
| 2.05 | а | |||||
| 2.06 | б | |||||
| 2.07 | а | |||||
| 2.08 | б | |||||
| 2.09 | а | |||||
| 2.10 | б |
Краткие сведения из теории
Измерительные преобразователи (датчики) - это устройства, реагирующие на изменение какой-либо физической величины и преобразующие ее в сигнал, удобный для дальнейшего использования.
Простейшим датчиком линейных перемещений является потенциометрический датчик, относящийся к датчикам активного сопротивления. Его основными достоинствами являются простота конструкции и возможность работы без последующего усиления сигнала. Основные недостатки - наличие скользящего электрического контакта, относительно большие перемещения движка и значительные усилия для осуществления перемещения.
Часто также применяются схемы делителя напряжения со средней точкой (рис.2.1,б). У такого делителя напряжение нагрузки меняет знак при переходе через ноль.
Статической характеристикой потенциометрического преобразователя называется зависимость напряжения Uн на сопротивлении нагрузки Rн от положения движка потенциометра x. При равномерной намотке потенциометра величина сопротивления R1 пропорциональна x. В том случае, когда Rн>>R статическая характеристика практически линейна. Если Rн сравнимо по величине с R, то характеристика окажется существенно нелинейной и в этом случае необходимо оценить максимальную относительную погрешность.
Пример 2.1. Вывести формулу и построить график зависимости выходного напряжения потенциометрического преобразователя в функции положения движка, оценить относительную погрешность преобразования, если R =400 Ом; Uп =50 В; l =80 мм; Rн1 = ¥ Ом; Rн2 = 80 Ом; Rн3 = 4 кОм(схема приведена на рис.2.1,а).
Решение. Из схемы очевидно, что i=i1+i2. Введем величину относительного перемещения a =x/l. (При перемещении движка из нижнего крайнего положения в верхнее a будет изменяться в пределах от 0 до 1).
Обозначим, Rн/R= s.
Применив законы электротехники и выполнив преобразования, получим (эту формулу предлагается вывести самостоятельно):
 (2.1)
(2.1)
Исходя из заданных значений параметров, получим для различных нагрузок
s 1 = ¥; s 2 = 80/400 = 0,2; s 3 = 4000/400 = 10.
Для s 1 >>1 из (2.1). Uн1=Uп a.
В соответствии с (2.1) для различных нагрузок получим:
для Rн1 = ¥ Uн1=50 a;
для Rн2=80 Ом 
для Rн3=4 кОм 
Задаваясь значениями a в диапазоне от 0 до 1 (при этом x= a l), рассчитываем зависимости Uн1=f( a ), Uн2=f( a ) и Uн3=f( a ).
Результаты расчета рекомендуется свести в таблицу, а затем построить статические характеристики. Для рассматриваемого примера они приведены на рис.2.2.
Из рис.2.2 следует, что при Rн>>R зависимость Uн3=f( a ) практически не отличается от зависимости Uн1=f( a ), т.е. когда Rн= ¥. Это следует и из формулы (2.1).
Относительная погрешность
 (2.2)
(2.2)
Подставив в (2.2) выражение для Uн, получим
 (2.3)
(2.3)
Если s 1>> 1 (что имеет место в реальных схемах), то
 (2.4)
(2.4)
Максимальное значение погрешности находим из условия

Рис.2.2. Зависимости для различных сопротивлений нагрузки:
1 - Rн= ¥; 2 - Rн=80 Ом; 3 - Rн=4 кОм
Получим a =2/3 и
 (2.5)
(2.5)
В рассматриваемом примере Uн1= a Uп=(2/3)•50=33,33В, в то время как Uн2=15,79В и 
По формуле (2.3) получим такой же результат.
Uн3=32,61В 
По формуле (2.5)  .
.
Варианты 2.11...2.20. Провести синтез комбинационного логического устройства по заданному таблицей истинности варианту, использовав набор логических элементов И-НЕ. (X1, X2, X3 - входные переменные; Y1,Y2 - выходные переменные).
Литература:/5/,с.39-45;67-71.
Таблица 2.2
| Значение входных | Варианты значений выходных переменных | |||||||||||||||||||||
| перемен-ных | 2.11 | 2.12 | 2.13 | 2.14 | 2.15 | 2.16 | 2.17 | 2.18 | 2.19 | 2.20 | ||||||||||||
| X1 | X2 | X3 | Y1 | Y2 | Y1 | Y2 | Y1 | Y2 | Y1 | Y2 | Y1 | Y2 | Y1 | Y2 | Y1 | Y2 | Y1 | Y2 | Y1 | Y2 | Y1 | Y2 |
Краткие сведения из теории
Работа комбинационной схемы полностью описывается таблицей истинности, поскольку состояние выходов зависит только от комбинации входных сигналов в данный момент времени и не зависит от того, в какой последовательности поступали входные сигналы.
Синтез такой схемы можно выполнить в следующем порядке:
1) по таблице истинности записать структурные формулы для выходных переменных;
2) минимизировать, если возможно, полученные выражения;
3) преобразовать выражение к виду, позволяющему реализовать схему, используя заданный набор логических элементов.
Для преобразования выражений следует воспользоваться законами алгебры логики (см. приложение 1).
Пример 2.2. По таблице истинности (табл.2.3) синтезировать логическую схему, использовав набор элементов И-НЕ.
Решение.
Из таблицы истинности получаем следующие структурные формулы (по условию срабатывания)

Таблица 2.3
| Значения входных переменных | Значения выходных переменных | |||
| X1 | X2 | X3 | Y1 | Y2 |
Схему можно упростить, если воспользоваться тем обстоятельством, что Y2 есть инверсия Y1, т.е.  . Поэтому для получения сигнала Y2 достаточно проинвертировать Y1.
. Поэтому для получения сигнала Y2 достаточно проинвертировать Y1.
Преобразуем выражение для Y1 к виду, позволяющему реализовать схему на элементах И-НЕ. Для этого надо взять двойную инверсию, что допустимо в соответствии с законом двойной инверсии, а затем раскрыть одну инверсию по закону де Моргана:


Схема, реализующая заданные функции, приведена на рис.2.3.
Рис.2.3. Схема, реализующая заданную логическую функцию
Прежде чем приступить к составлению схемы по заданной структурной формуле, необходимо минимизировать логическую функцию путем непосредственного применения законов алгебры логики (см. приложение 1). Следует иметь ввиду, что для эффективного применения этого метода необходимо хорошее знание законов алгебры логики и достаточный навык в их использовании.
Варианты 2.21...2.30. По таблице истинности (табл.2.4) получить с помощью карт Карно минимальное выражение логической функции и провести синтез комбинационного логического устройства, использовав набор логических элементов И-НЕ.
Таблица 2.4
| X1 | X2 | X3 | X4 | Y1 | Y2 | Y3 | Y4 | Y5 | Y6 | Y7 | Y8 | Y9 | Y10 |
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 584; Нарушение авторских прав?; Мы поможем в написании вашей работы!