КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Параметры и характеристики датчиков
|
|
|
|
Датчик является ключевым элементом СРВ и должен воспроизводить физическую величину максимально быстро и точно. При оценке и сравнении измерительных преобразователей необходимо учитывать следующие их основные свойства:
1. Воспроизводимость функции преобразования. Возможность изготовлять преобразователи с заранее предусмотренными характеристиками является необходимым условием выпуска взаимозаменяемых преобразователей.
2. Постоянство во времени функции преобразования. При изменении с течением времени функции преобразования приходится повторять градуировку, что крайне нежелательно, а в некоторых случаях невозможно (преобразователь работает в недоступном месте).
3. Для облегчения унификации выходного сигнала преобразователей с целью использования их с цифровыми измерительными приборами, измерительными информационными системами и вычислительными машинами наиболее желательна функция преобразования y=f(х) линейного вида.
4. Важными характеристиками преобразователя являются его погрешности и чувствительность. Основная погрешность преобразователя может быть обусловлена принципом действия, несовершенством конструкции и технологии изготовления и проявляется она при номинальных значениях внешних факторов.
5. Обратное воздействие преобразователя на измеряемую величину. Преобразователи оказывают обратное влияние на измеряемую величину, искажают ее, вызывая изменение выходного сигнала.
6. Динамические свойства преобразователя. При изменении входной величины в преобразователе возникает переходный процесс, характер которого зависит от наличия в преобразователе элементов, запасающих энергию (двигающиеся детали, электрические конденсаторы, катушки индуктивности, детали, обладающие теплоемкостью и т. д.). Переходный процесс проявляется в виде инерции – запаздывания реакции преобразователя на изменение входной величины.
При измерении быстро изменяющихся величин преобразователь работает в нестационарном режиме, а поэтому при оценке качества преобразователей необходимо учитывать их динамические характеристики, которые в значительной мере определяют точность измерения. Динамические свойства преобразователя в соответствии с ГОСТ 8.256 – 77 могут быть охарактеризованы полными и частными динамическими характеристиками. Обычно от преобразователя требуется, чтобы он вносил минимальное запаздывание в процесс преобразования. Кроме рассмотренных свойств, при оценке преобразователей учитываются также и другие показатели качества их работы; влияние внешних факторов (температуры, давления, вибрации и т. д.), взрывобезопасность, устойчивость к механическим, тепловым, электрическим и другим перегрузкам, удобство монтажа и обслуживания, габариты, масса, удобство градуировки, стоимость изготовления и эксплуатации, надежность и т. д.
Большая часть характеристик датчика, которые приводятся в техническом описании – статические параметры:
1. Чувствительность измерительного прибора – отношение изменения сигнала на выходе измерительного прибора к вызывающему его изменению измеряемой величины.
2. Разрешение – наименьшее изменение измеряемой величины, которая может быть зафиксирована и точно показана датчиком.
3. Линейность – не описывается аналитически, а определяется, исходя из градуировочной кривой датчика. Близость этой кривой к прямой линии определяет степень линейности.
4. Рабочий диапазон – определяется верхним и нижним пределами значения входной величины.
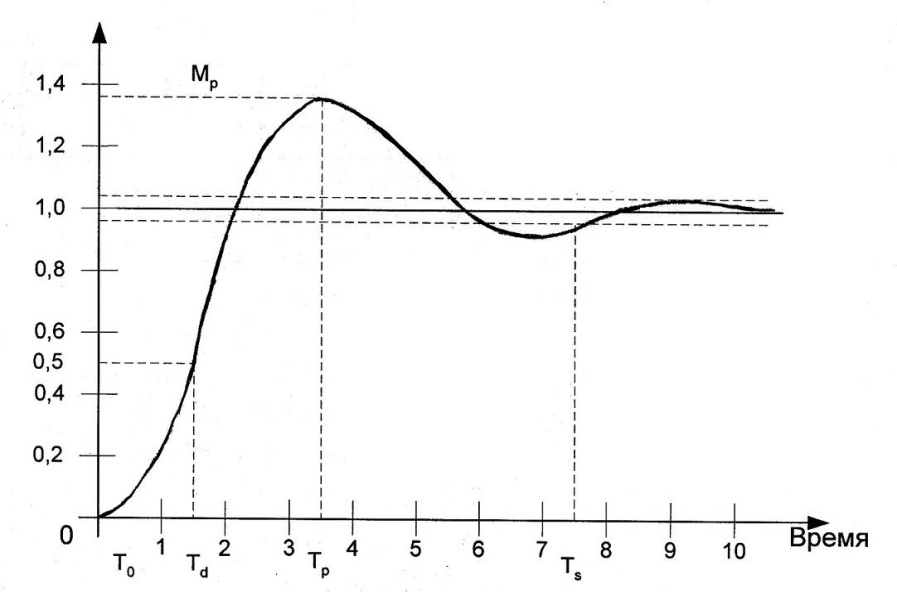
Динамические (параметры) характеристики датчика (рис. 5.9) :
– время прохождения зоны нечувствительности – время между началом изменения физической величины и моментом реакции датчика;
– запаздывание – время, через которое показание датчика первый раз достигнет 50 % установившегося значения;
– время нарастания –время, за которое выходной сигнал увеличивается от 10 % до 90% установившегося значения;
– время переходного процесса (время установления) – время, начиная с которого отклонения выхода датчика от установившегося значения становится меньше заданной величины, например, ± 5 %.
|
| Рис. 5.9. Динамическая реакция датчика (реакция на скачок), где Т 0 – время прохождения зоны нечувствительности; Тd – запаздывание; Тр – время достижения первого максимума; Тs – время установления; Мр – перерегулирование |
Характеристики измерительных преобразователей неэлектрических величин. Зависимость выходной величины измерительного преобразователя у от входной х выражается уравнением преобразования у = f (х) Уравнение преобразования (функцию преобразования) обычно приходится находить экспериментально, т. е. прибегать к градуировке преобразователей. Результаты градуировки выражаются в виде таблиц, графиков или аналитически.
Часто у преобразователей выходной сигнал у зависит не только от входной измеряемой величины х, но и от внешнего фактора Z, т. е. функция преобразования в общем виде y=f (х, Z). В этом случае при градуировке определяется ряд функций преобразования при разных значениях Z. Знание функций преобразования при разных значениях влияющего фактора позволяет тем или иным способом (введением поправки, автоматической коррекцией) учесть влияние внешнего фактора. Чувствительность S всего измерительного устройства прямого преобразования, состоящего из последовательного ряда измерительных преобразователей, определяется по формуле
S = S 1 S 2 S 3… Sn,
где S 1, S 2, S 3... Sn – чувствительности преобразователей, образующих канал передачи информации.
Каждый преобразователь имеет свою погрешность, и, очевидно, максимальная погрешность всего измерительного устройства, построенного по методу прямого преобразования, окажется равной сумме погрешностей отдельных преобразователей. Поэтому, несмотря на простоту и быстродействие приборов, построенных по методу прямого преобразования, для точных измерений неэлектрических величин применяют метод уравновешивания. При этом чувствительность измерительного устройства определяется формулой
S = K /(1+ K β),
где К – коэффициент передачи цепи прямого преобразования; β – коэффициент передачи цепи обратного преобразования.
При выполнении условия К β >> 1 погрешность измерительного устройства будет определяться только погрешностью цепи обратного преобразования. Значения выходных величин большинства первичных преобразователей – термопар, терморезисторов, ионизационных преобразователей, газоанализаторов и других – незначительны и находятся обычно в диапазоне 10–6–10–2 В и 10–10–10–5 А. Без предварительного усиления малые напряжения и токи невозможно ни измерить, ни передать по линиям связи без существенных погрешностей. В связи с развитием операционных интегральных усилителей для параметрических преобразователей широко применяют мостовые цепи с автоматическим уравновешиванием.
Схема моста следящего уравновешивания со статической характеристикой приведена на рис. 5.10. Здесь R 1 – медный терморезистор, предназначенный для измерения температуры, а остальные плечи моста образованы резисторами R 2 R 4 и R 3 +R M.
| ||||||||||||
| Рис.5.10. Схема моста со статическим следящим уравновешиванием |
Пусть при измеряемой температуре сопротивление R 1= R 3+ R M и R 2= R 4, тогда напряжение на диагонали U аб, подаваемое на вход усилителя, также равно нулю и ток указателя I ук=0. При возрастании сопротивления R 1 усилитель будет давать на выходе такой ток I yк, чтобы падение напряжения на резисторе R М уравновешивало прирост напряжения на резисторе R 1. Таким образом, мост будет оставаться в равновесии и шкала прибора будет линейна при приращениях Δ R 1, а сопротивление R М определит масштаб соотношения между Δ R 1 и I yк.
Первичные преобразователи с помощью соединительных проводов могут быть удалены от ИЦ на некоторое расстояние. В этом случае на результат измерения могут оказывать влияние вариация значений сопротивлений соединительных проводов при изменении температуры окружающей среды и паразитные ЭДС, возникающие от действия внешних электромагнитных полей.
Погрешность, вносимая соединительной линией (каналом связи), рассматривается как составляющая методической погрешности, входящей в суммарную погрешность измерений неэлектрической величины. Точность результата такого измерения может быть оценена приближенной максимальной погрешностью по формуле
|δmax|=|δпп|+|δиц|+|δ еr |+|δм|,
где δmax – предел допускаемой относительной погрешности измерения неэлектрической величины; δпп – максимальное значение относительной погрешности первичного преобразователя; δиц – относительная погрешность измерительной цепи; δ еr– относительная погрешность измерения выходного показывающего прибора; δм– методическая погрешность.
Анализ мостовой схемы. Сопротивления плеч моста могут быть как активными, так и реактивными, а источник питания U и нагрузка R н могут меняться местами, при этом чувствительность моста также изменяется. Мосты проектируют так, что напряжение на измерительной диагонали отсутствует, если на дифференциальный преобразователь не воздействует входная величина. Так, когда якорь дифференциального индуктивного преобразователя включенного в мостовую схему находится в среднем положении, сопротивления его плеч Z 1и Z 2 равны между собой, их значения принимаем за Z 0.
Для упрощения анализа можно считать, что дифференциальный преобразователь состоит из двух простых преобразователей. При перемещении якоря сопротивление одной секции становится равным Z 1 =Z 0 + D Z 1, сопротивление другой Z 2 =Z 0 – D Z 2. Изменения сопротивлений D Z 1 =Z 1 –Z 0 и D Z 2 =Z 0 –Z 2, соответствующие некоторому перемещению якоря относительно его среднего положения, в общем случае не равны между собой в силу нелинейности функции преобразования. Однако, если перемещение мало, то их различия незначительны. Положим, что при малых перемещениях якоря относительно его среднего положения изменение сопротивлений линейно зависит от перемещения якоря х. Так, в индуктивных преобразователях при перемещении якоря сопротивление первичной обмотки Z 1одного простого преобразователя возрастает, а другого Z 2 – примерно на столько же уменьшается. При этом
D Z 1=D Z 2=D Z.
Если сопротивление нагрузки R н достаточно велико (режим холостого хода), то выходное напряжение моста равно
U выx=  –
–  =
=  ,
,
где U – напряжение питания. В качестве Z 1 и Z 2 включаются одинаковые резисторы.
При отсутствии входного воздействия сопротивления Z 1= Z 2= Z 0. Кроме того, обычно выбирают Z 3 =Z 4. В этом случае, когда деформация тензорезистора отсутствует (e= 0), Ux= 0.
При входном воздействии, выходное напряжение моста пропорционально разности сопротивлений тензорезисторов:
U выx=  .
.
Мостовая цепь является дифференциальной, следовательно, в ней компенсируются аддитивные погрешности. С применением мостовой цепи приборы строятся по дифференциальной схеме первого или второго типа.
При использовании дифференциальной схемы первого типа, т.е. при Z 1 =Z 0 + D Z и Z 2 =Z 0, выходное напряжение цепи равно
U выx=  .
.
Изменения сопротивлений преобразователей обычно невелики, и можно считать, что напряжение на измерительной диагонали моста изменяется пропорционально D Z/Z. В этом случае функция преобразования мостовой схемы в режиме холостого хода характеризуется чувствительностью:
S сх=  = U /4,
= U /4,
где Uх – напряжение на измерительной диагонали при изменении сопротивления преобразователя, равном D Z.
При использовании дифференциальной схемы второго типа, когда Z 1 =Z 0 + D Z и Z 2 =Z 0–D Z, выходное напряжение и чувствительность в режиме холостого хода увеличиваются вдвое:
U выx=  , а S сх=
, а S сх=  = U /2.
= U /2.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 4633; Нарушение авторских прав?; Мы поможем в написании вашей работы!