КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Емкостные преобразователи
|
|
|
|
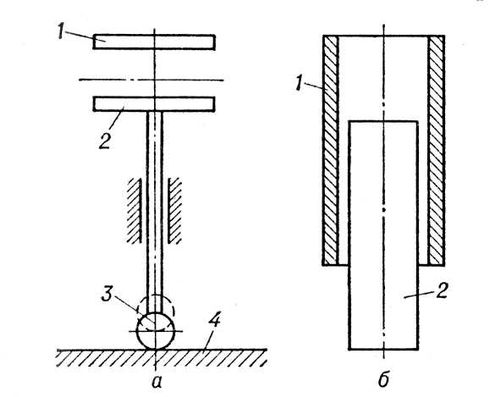
Принцип действия и типы емкостных датчиков. Работа емкостных датчиков заключается в преобразовании измеряемой величины в емкостное сопротивление. Поэтому емкостные датчики относятся к параметрическим. Принцип действия емкостных датчиков основан на зависимости электрической емкости конденсатора от размеров обкладок, расстояния между ними, диэлектрической проницаемости среды между обкладками. Наибольшее распространение получили емкостные датчики, измеряющие линейные перемещения. На рис. 5.25, а, б показаны схема емкостного датчика линейного перемещения и зависимость емкости датчика от входного сигнала – перемещения х.

|
|
| Рис. 5.25. Емкостный датчик линейного перемещения |
Емкостные преобразователи представляют собой конденсатор, одна пластина которого перемещается под действием измеряемой величины х относительно неподвижной пластины. Изменение расстояния между пластинами ведет к изменению емкости преобразователя. Емкость данного конденсатора:
C =ee0 S/x,
где e – относительная диэлектрическая проницаемость среды между обкладками; e0 – диэлектрическая постоянная (e0=8,85´10–12 Ф/м); S – площадь обкладок; x –расстояние между обкладками.
Таким образом, преобразователь может быть построен с использованием зависимостей С = f 1(ε), С = f 2(S), С = f 3(x). Если изменяется расстояние x между электродами, функция преобразования С = f 3(x) представляет собой гиперболическую функцию. Чувствительность преобразователя возрастает с уменьшением расстояния x, поэтому целесообразно уменьшать начальное расстояние между пластинами d нач (менее 1 мм), которое определяется пробивным напряжением воздуха (10 кВ/см для воздуха). Малое рабочее перемещение пластин приводит к появлению погрешности от изменения расстояния между пластинами при колебаниях температуры, которую можно снизить выбором размеров деталей преобразователя и материалов.
Чувствительность емкостного датчика определяется как отношение приращения емкости к вызвавшему это приращение изменению измеряемой величины. Для плоского двухобкладочного емкостного датчика линейного перемещения с воздушным зазором емкость равна
C =8,85´10–12 s /(d нач+ x), (5.4)
где d нач– начальное расстояние между пластинами площадью s.
Начальное расстояние d нач выбирается по конструктивным соображениям, но оно не должно быть меньше некоторого значения, при котором возможен электрический пробой конденсатора. Для воздуха пробивное напряжение составляет порядка 3 кВ на 1 мм. Минимальное расстояние воздушного промежутка в высокочувствительных емкостных микрометрах принимают порядка 30 мкм. Чувствительность плоского емкостного датчика получаем дифференцированием уравнения (5.4):
S д= dC / dx =–8,85´10–12  . (5.5)
. (5.5)
Чувствительность, как следует из (5.5), не постоянна в диапазоне возможных перемещений х. Она максимальна при малых входных сигналах (когда пластины расположены близко друг к другу) и быстро уменьшается при удалении пластин. Для увеличения чувствительности S целесообразно уменьшить x до d нач.
Если перемещать диэлектрическую пластину в зазоре плоского конденсатора, то можно получить преобразователь с переменной диэлектрической проницаемостью. Емкость такого преобразователя определяется как емкость двух параллельно включенных конденсаторов. Один из них Сe образован частью электродов и диэлектрической пластиной, другой С 0 – оставшейся частью электродов с межэлектродным пространством, не заполненным пластинкой. Если пластинка с относительной диэлектрической проницаемостью e r имеет толщину x,равную расстоянию между электродами, то
C = Ce + C 0=e0[ Q + Qe (e r – 1)]/d,
где Q – площадь электродов; Qe – часть площади диэлектрической пластины, находящаяся между электродами.
На рис. 5.26, а, бпоказаны схема емкостного датчика углового перемещения и зависимость емкости датчика от входного сигнала – угла поворота a. В этом датчике одна из пластин 1 неподвижна, другая 2 – может поворачиваться на оси относительно пластины 1.Расстояние между пластинами не меняется, при повороте пластины 2 меняется активная площадь взаимного перекрытия пластин 1 и 2(на рис. 5.26, а отмечена штриховкой), что приводит к изменению емкости.
|
|
|
| Рис. 5.26. Емкостный датчик углового перемещения |
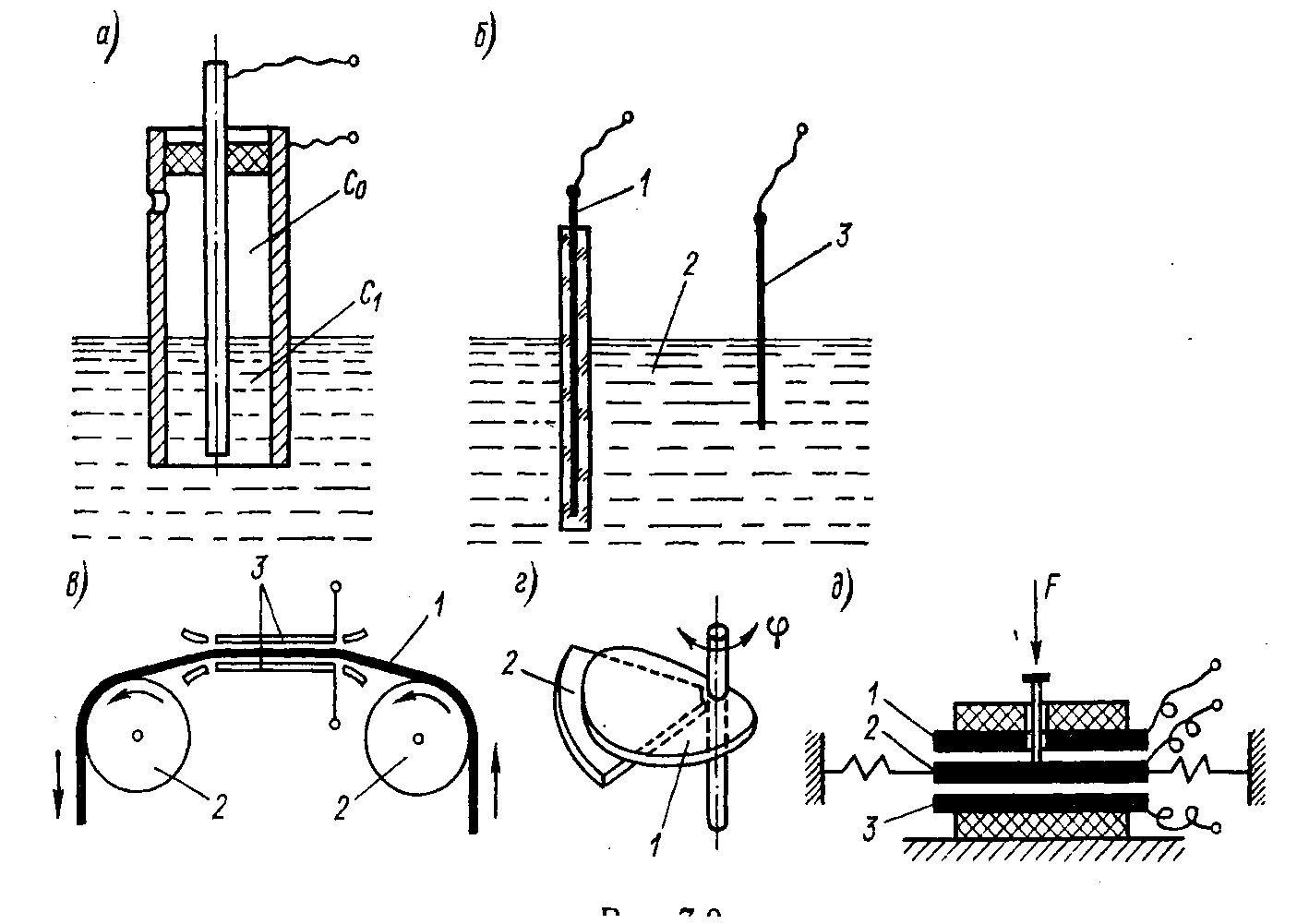
Примерами реализации емкостных датчиков перемещения приведены плоскопараллельный датчик, для которого С = f 3(x)(рис. 5.27, а), и цилиндрический датчик перемещения с С = f 2(S) (рис. 5.27, б).
|
| Рис. 5.27.Ёмкостные датчики перемещения: а - плоскопараллельный; б - цилиндрический |
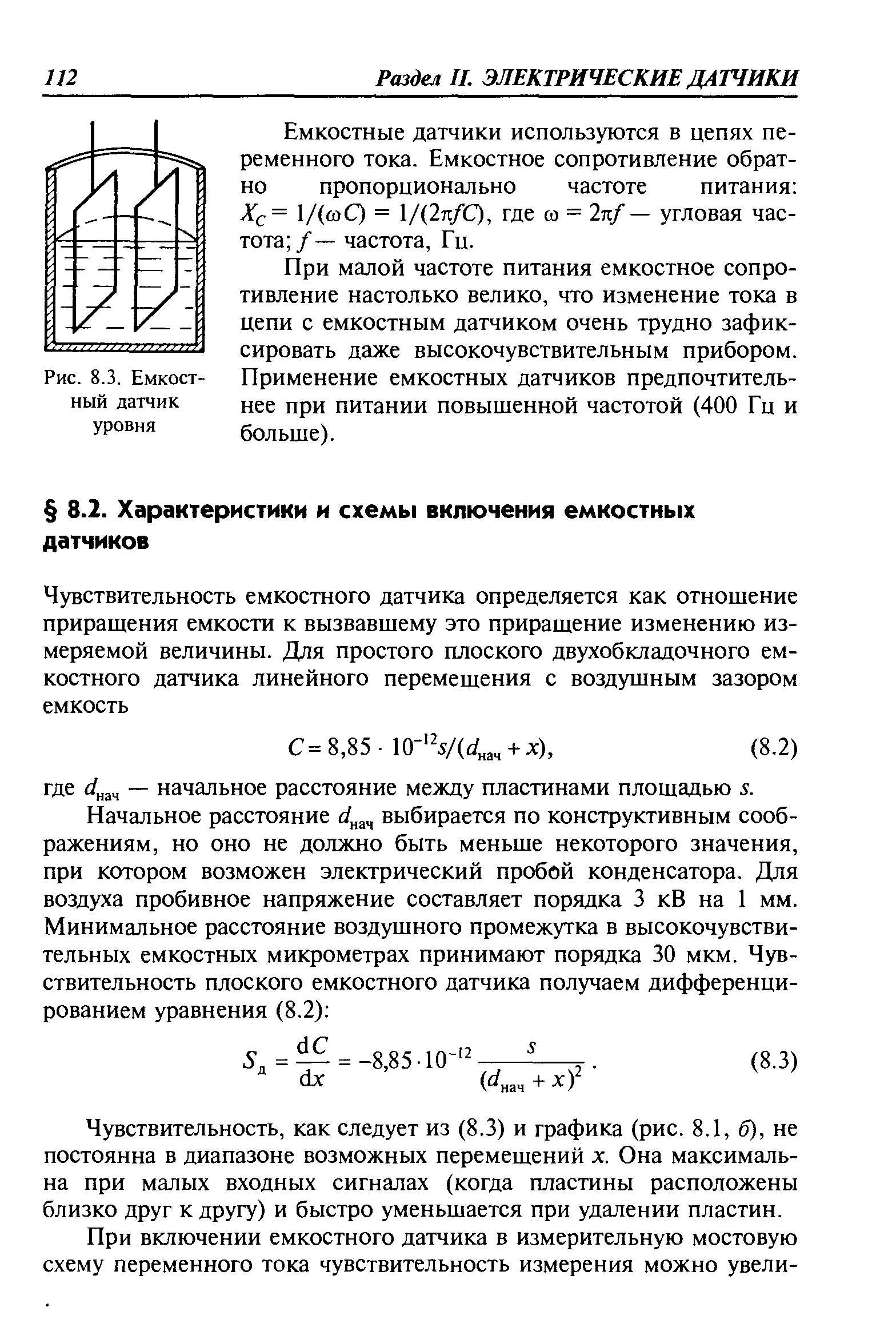
На рис. 5.28 показан емкостный датчик уровня. В этом датчике емкость изменяется в зависимости от уровня жидкости, поскольку изменяется диэлектрическая проницаемость среды между неподвижными пластинами. Емкостные датчики используются в цепях переменного тока. Емкостное сопротивление обратно пропорционально частоте питания: ХC =1/(w С)= =1/(2p fС), где w=2p f – угловая частота; f – частота, Гц.
При малой частоте питания емкостное сопротивление настолько велико, что изменение тока в цепи с емкостным датчиком трудно зафиксировать даже высокочувствительным прибором. Применение емкостных датчиков предпочтительнее при питании повышенной частотой (³400 Гц).
На рис. 5.29 показан емкостный датчик с цилиндрическими обкладками, применяемый для измерения уровня токонепроводящей жидкости или сыпучих тел. Одной обкладкой может служить металлический бак или резервуар с внутренним радиусом r 1, вторая обкладка выполнена в виде металлического стержня или цилиндра с наружным радиусом r 2. Если резервуар заполнен до уровня х жидкостью с диэлектрической проницаемостью eи, то емкость датчика можно представить как емкость двух параллельно соединенных конденсаторов:
С=Сx+СL – x,(5.6)
где Сх – емкость нижней части резервуара, заполненной жидкостью; СL – x – емкость верхней части резервуара, заполненной воздухом.
| 
| 
|
| Рис. 5.28. Емкостный датчик уровня | Рис. 5.29. Емкостный датчик уровня с цилиндрическими обкладками и изменяющейся диэлектрической проницаемостью среды |
Чувствительность датчика тем больше, чем больше диэлектрическая проницаемость eи материала, уровень которого измеряется. Емкости конденсатора с цилиндрическими обкладками:
C =e0e  ,
,
где l –высота обкладок датчика, т. е. максимальный уровень заполнения резервуара.
Для емкости нижней части датчика
Сx = e0eи  . (5.7)
. (5.7)
Для емкости верхней части датчика
СL – x =e0e  . (5.8)
. (5.8)
Подставляя формулы (5.7) и (5.8) в (5.6), получим
С =e0  , (5.9)
, (5.9)
а дифференцируя (5.9) по уровню, получаем чувствительность
S д=  . (5.10)
. (5.10)
Из уравнения (5.10) видно, что чувствительность датчика постоянна во всем диапазоне измерений. При измерении уровня химически агрессивных жидкостей наружная и внутренняя обкладки покрываются защитным покрытием.
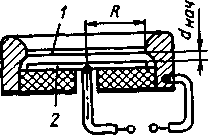
В емкостном датчике давления (рис. 5.30) одной из обкладок конденсатора является плоская круглая мембрана 1, воспринимающая давление Р. Другая обкладка 2датчика неподвижна и имеет такой же радиус R, что и мембрана 1. Между обкладками конденсатора имеется начальный воздушный промежуток d нач. Под воздействием измеряемого давления Р мембрана прогибается, причем наибольшее d перемещение имеет центр мембраны. Неравномерное изменение воздушного промежутка между пластинами затрудняет вывод формулы для емкости такого датчика. Приведем ее в окончательном виде:
|
| Рис. 5.30. Емкостный датчик давления |
C =  .
.
Непосредственное объединение чувствительного элемента (мембраны) с датчиком без промежуточных кинематических элементов обеспечивает простоту конструкции и высокую надежность, а отсутствие потерь на трение обусловливает высокую чувствительность по давлению такого датчика. При взаимном перемещении пластин в конденсаторе изменяется энергия электрического поля, что приводит к появлению усилий, приложенных к пластинам.
Энергия электрического поля в конденсаторе:
W э= С  .
.
В емкостных преобразователях данного типа с емкостью С и напряжением U возникает усилие притяжения между пластинами, определяемое производной от энергии электрического поля W э по перемещению подвижной пластины d:
F э=  .
.
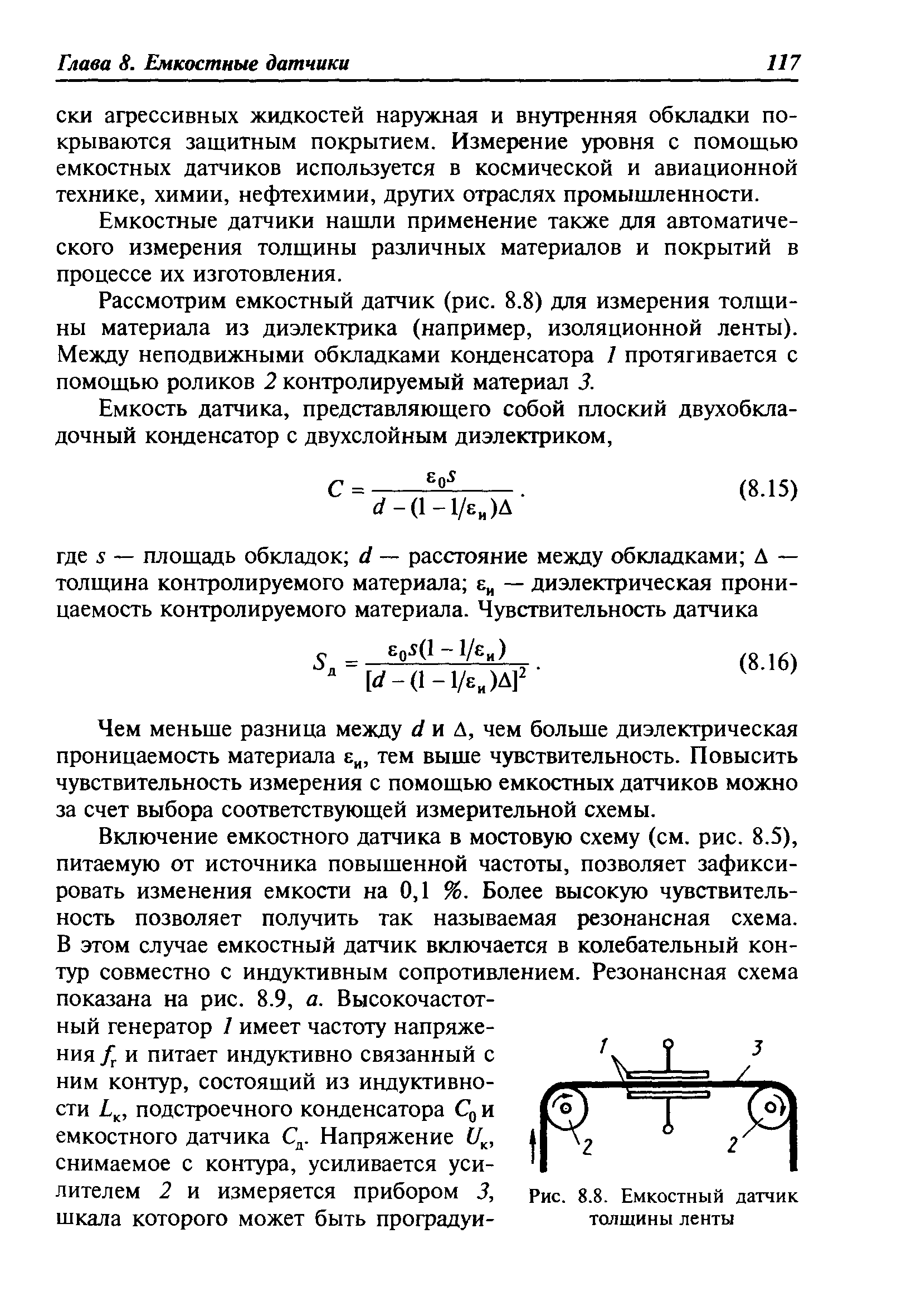
Емкостные датчики применяются и для автоматического измерения толщины материалов и покрытий при их изготовлении. Так, на рис. 5.31 приведен емкостный датчик для измерения толщины материала из диэлектрика (например, изоляционной ленты). Между неподвижными обкладками конденсатора 1 протягивается с помощью роликов 2 контролируемый материал 3. Емкость датчика, представляющего собой плоский двухобкладочный конденсатор с двухслойным диэлектриком:
|
| Рис. 5.31. Емкостный датчик толщины ленты |
C =  ,
,
где s – площадь обкладок; d – расстояние между обкладками; D–толщина контролируемого материала; eи–диэлектрическая проницаемость контролируемого материала. Чем меньше разница между величинами d и D и больше диэлектрическая проницаемость материала eи, тем выше чувствительность. Повысить чувствительность измерения с помощью емкостных датчиков можно за счет выбора соответствующей измерительной схемы.
|
| Рис. 5.32. Дифференциальный емкостный датчик в мостовой схеме |
Схемы включения емкостных датчиков. Емкостный преобразователь включается в измерительную цепь; при этом изменение его емкости преобразуется в изменение напряжения или тока либо в частоту синусоидального или импульсного тока. Существует довольно много различных измерительных цепей включения емкостных преобразователей. Рассмотрим некоторые из них.
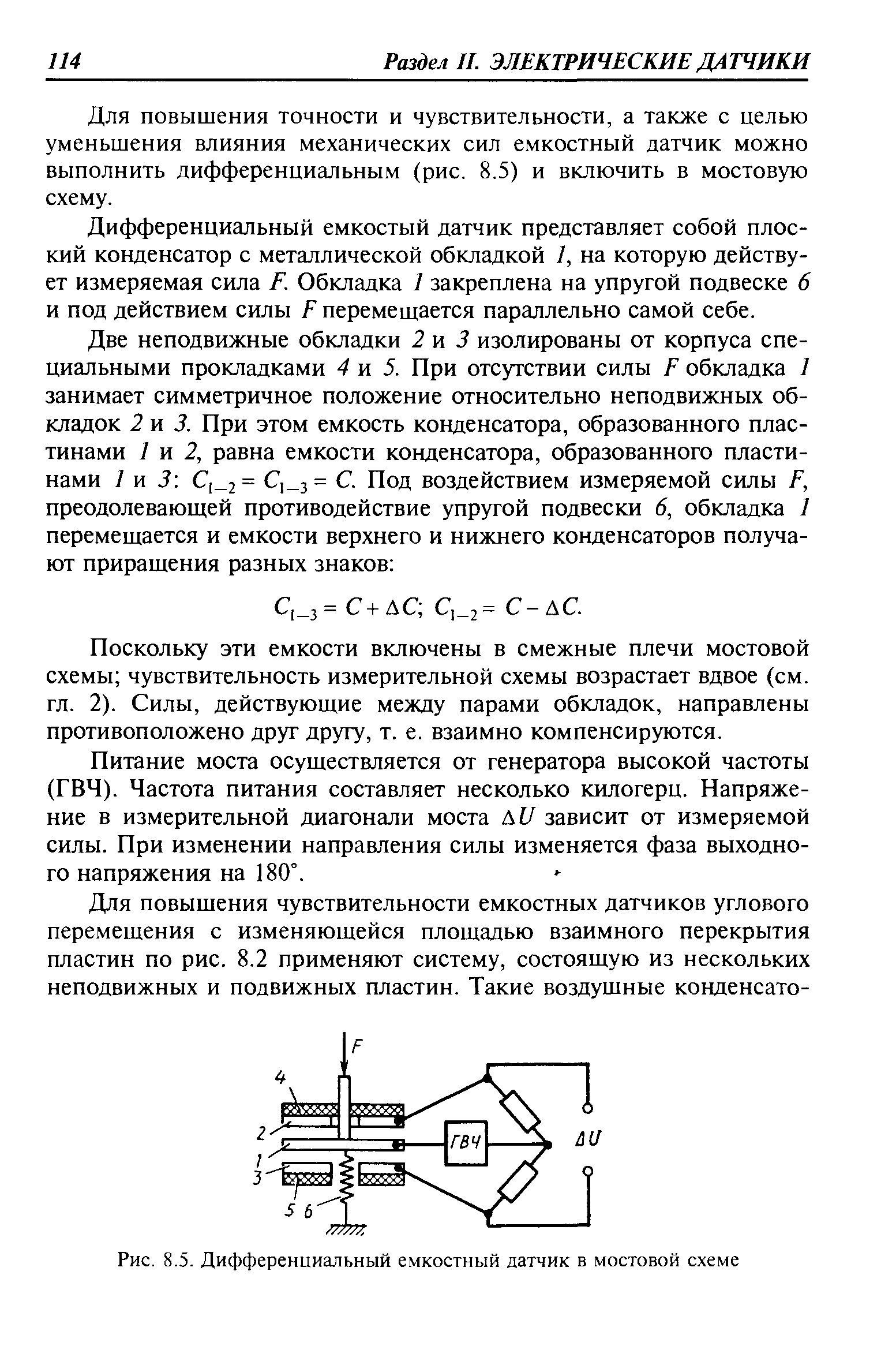
Для повышения точности, чувствительности и уменьшения влияния механических сил емкостный датчик можно выполнить дифференциальным (рис. 5.32), у которого имеется одна подвижная и две неподвижные пластины, и включить в мостовую схему, работающую в неравновесном режиме. Дифференциальный емкостный датчик представляет плоский конденсатор с металлической обкладкой 1,на которую действует измеряемая сила F. Обкладка 1 закреплена на упругой подвеске 6 и под действием силы Р перемещается параллельно самой себе. При воздействии измеряемой величины х у этих преобразователей одновременно изменяются емкости С 1-2 и С 1-3.
Две неподвижные обкладки 2 и 3изолированы от корпуса прокладками 4 и 5. При отсутствии силы Р обкладка 1 занимает симметричное положение относительно неподвижных обкладок 2и 3.При этом емкость конденсатора, образованного пластинами 1 и 2, равна емкости конденсатора с пластинами 1 и 3: С 1-2= С 1-3= С. Под воздействием измеряемой силы Р, преодолевающей противодействие упругой подвески 6,обкладка 7 перемещается и емкости верхнего и нижнего конденсаторов получают приращения разных знаков:
С 1-3= С +D С; С 1-2= С – D С.
Поскольку эти емкости включены в смежные плечи мостовой схемы, чувствительность измерительной схемы возрастает вдвое. Силы, действующие между парами обкладок, направлены противоположено друг другу, т. е. взаимно компенсируются. Питание моста осуществляется от генератора высокой частоты (ГВЧ). Частота питания составляет несколько килогерц. Напряжение в измерительной диагонали моста зависит от измеряемой силы. При изменении направления силы изменяется фаза выходного напряжения на 180°.
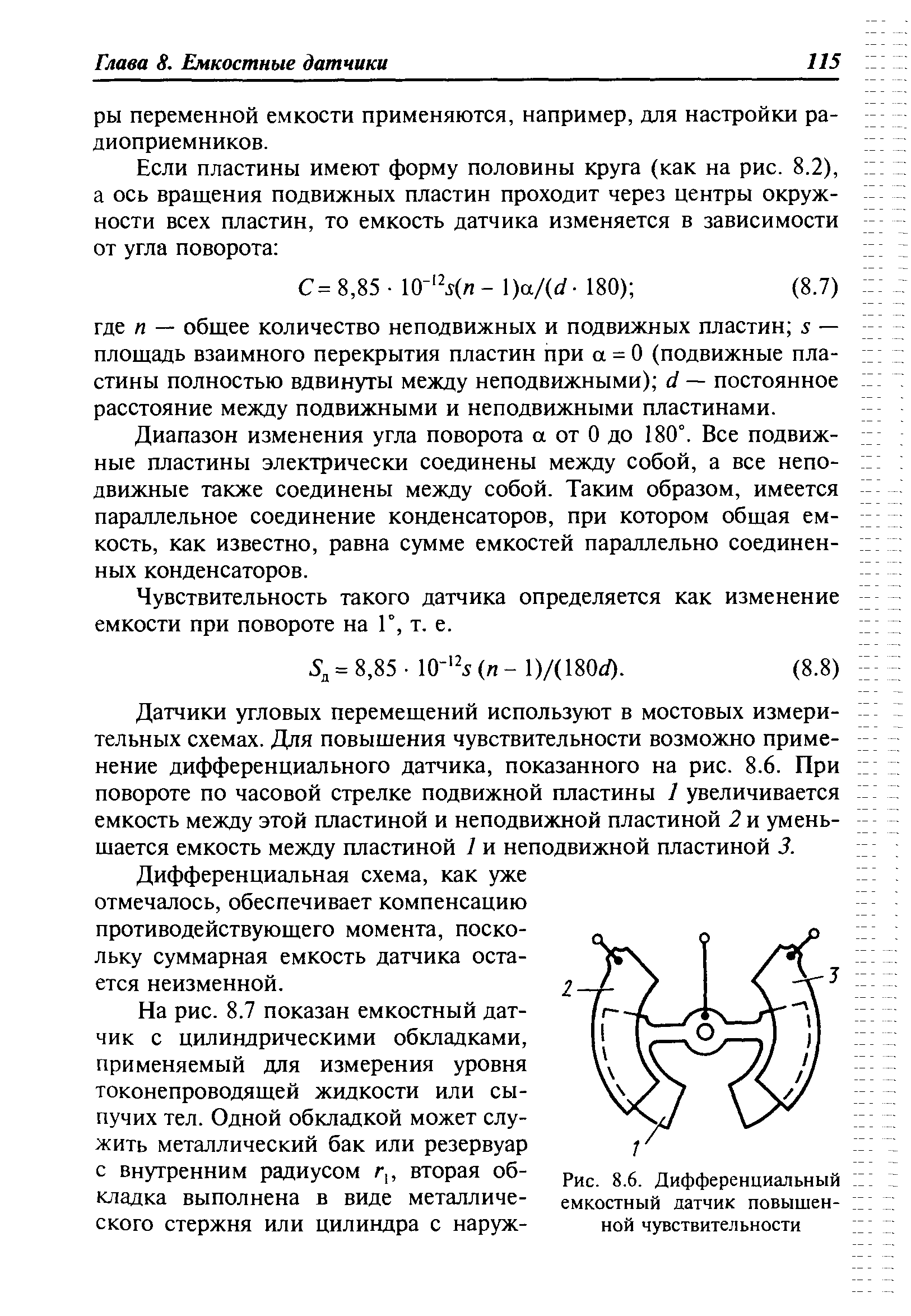
Для повышения чувствительности емкостных датчиков углового перемещения с изменяющейся площадью взаимного перекрытия пластин по рис. 5.26 применяют систему, состоящую из нескольких неподвижных и подвижных пластин. Если пластины имеют форму половины круга (рис. 5.26), а ось вращения подвижных пластин проходит через центры окружности всех пластин, то емкость датчика изменяется в зависимости от угла поворота:
C =8,85´10–12 s (n –1)a/(d ´180),
где п – общее количество неподвижных и подвижных пластин; s – площадь взаимного перекрытия пластин при a=0 (подвижные пластины полностью вдвинуты между неподвижными); d – постоянное расстояние между подвижными и неподвижными пластинами.
Диапазон изменения угла поворота a от 0 до 180°. Все подвижные пластины электрически соединены между собой, а все неподвижные также соединены между собой, т.е. осуществляется параллельное соединение конденсаторов, при котором общая емкость равна сумме емкостей параллельно соединенных конденсаторов.
Чувствительность такого датчика определяется как изменение емкости при повороте на 1°, т. е.
S д=8,85´10–12 s (n –1)/(d ´180).
Датчики угловых перемещений используют в мостовых измерительных схемах. Включение емкостного датчика в мостовую схему (рис. 5.32), питаемую от источника повышенной частоты, позволяет зафиксировать изменения емкости на 0,1%. Для повышения чувствительности применяют дифференциальный датчик, показанный на рис. 5.33. При повороте по часовой стрелке подвижной пластины 1 увеличивается емкость между этой пластиной и неподвижной пластиной 2 и уменьшается емкость между пластиной 1и неподвижной пластиной 3. Такой преобразователь используют для измерения сравнительно больших линейных (более 1 мм) и угловых перемещений. В этих преобразователях легко получить требуемый характер функции преобразования путем профилирования пластин. Дифференциальная схема обеспечивает компенсацию противодействующего момента, поскольку суммарная емкость датчика остается неизменной.
|
| Рис. 5.33. Дифференциальный емкостный датчик повышенной чувствительности |
При включении емкостного датчика в измерительную мостовую схему переменного тока чувствительность измерения можно увеличить повышением напряжения питания моста. При этом необходимо иметь в виду опасность пробоя между пластинами. Для значительного увеличения напряжения питания между обкладками конденсатора помещают тонкую слюдяную пластинку. Для повышения чувствительности измерительной схемы с емкостным датчиком необходимо повышать частоту питающего напряжения. Однако при этом необходимы специальные меры по экранированию схемы и подводящих проводов для уменьшения погрешности измерения, вызванной токами утечки и наводки.
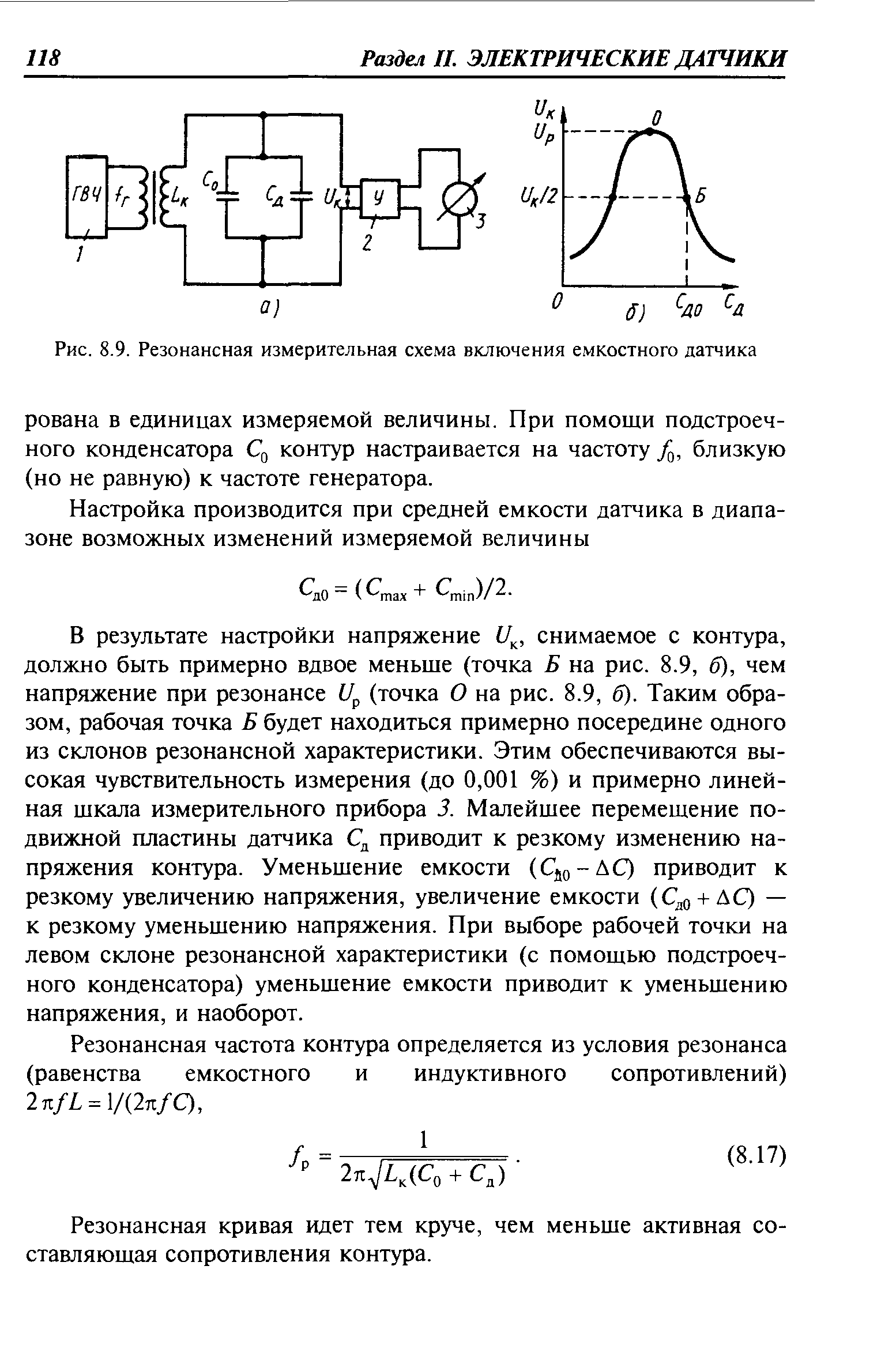
Более высокую чувствительность позволяет получить так называемая резонансная схема. В этом случае емкостный датчик включается в колебательный контур совместно с индуктивным сопротивлением. Резонансная схема показана на рис. 5.34, а. Высокочастотный генератор 1 имеет частоту напряжения f ги питает через разделительный трансформатор связанный с ним контур, состоящий из индуктивности L к, подстроечного конденсатора С0 и емкостного датчика Сд, частота и значение напряжения генератора постоянны. Напряжение U к,снимаемое с контура, усиливается усилителем У и измеряется прибором 3, шкала которого может быть проградуирована в единицах измеряемой величины. При помощи подстроечного конденсатора С 0 контур настраивается на частоту f 0,близкую (но не равную) к частоте генератора так, чтобы чувствительность измерительной цепи
S =D U/ D С
была максимальной
fp =  .
.
|
| Рис. 5.34. Резонансная измерительная схема включения емкостного датчика |
Настройка производится при средней емкости датчика в диапазоне возможных изменений измеряемой величины:
C д0=(С max+ C min)/2.
В результате настройки напряжение U к, снимаемое с контура, должно быть примерно вдвое меньше (точка Б на рис. 5.34, б), чем напряжение при резонансе U р(точка О на рис. 5.34, б). Таким образом, рабочая точка Б будет находиться примерно посередине одного из склонов резонансной характеристики. Этим обеспечиваются высокая чувствительность измерения (до 0,001 %) и примерно линейная шкала измерительного прибора 3. Малейшее перемещение подвижной пластины датчика С д приводит к резкому изменению напряжения контура. Уменьшение емкости (С д0–D С) приводит к резкому увеличению напряжения, увеличение емкости (С д0 + D С)–к резкому уменьшению напряжения. При выборе рабочей точки на левом склоне резонансной характеристики (с помощью подстроечного конденсатора) уменьшение емкости приводит к уменьшению напряжения и наоборот. Резонансная частота контура определяется из условия резонанса (равенства емкостного и индуктивного сопротивлений) 2p fL =1/(2p fC). Резонансная кривая идет тем круче, чем меньше активная составляющая сопротивления контура. Чувствительность резонансной цепи довольно высока и увеличивается с увеличением добротности контура.
Погрешность емкостного преобразователя. Электроды емкостного преобразователя монтируются на изоляционных деталях или разделяются ими. Разнородные конструктивные детали датчика имеют различные коэффициенты линейного расширения. При изменении температуры это приводит к изменению расстояния между электродами, хотя это изменение мало, оно может быть соизмеримо с расстоянием между электродами и приводит к температурной погрешности, имеющей аддитивную и мультипликативную составляющие. Первая может быть уменьшена применением дифференциальных преобразователей.
Номинальная емкость емкостных преобразователей обычно лежит в пределах от единиц до сотен пикофарад. На частоте 50 Гц внутреннее сопротивление преобразователя достигает значений более 107 Ом. При столь высоком сопротивлении возможны погрешности, обусловленные паразитными токами утечки, причем на результат измерения влияет непостоянство сопротивления изоляции. Для уменьшения сопротивления преобразователя частота напряжения питания увеличивается до нескольких килогерц и выше.
Поскольку полная емкость преобразователя изменяется в присутствии посторонних металлических предметов, преобразователь, а также идущие к нему провода и элементы измерительной цепи необходимо экранировать. Однако емкость экрана может изменяться под влиянием изменения влажности воздуха, вибрации и по другим причинам. Экранированные провода могут изменять свою емкость при их изгибах, когда токоведущий провод меняет свое положение относительно экрана что приводят к погрешности.
Особенности применения емкостных преобразователей. Емкостные преобразователи имеют ряд специфических достоинств и недостатков, определяющих область их применения. Конструкция емкостного датчика проста, он имеет малые массу и размеры. Его подвижные электроды могут быть достаточно жесткими, с высокой собственной частотой, что дает возможность измерять быстропеременные величины. Емкостные преобразователи можно выполнять с заданной (линейной или нелинейной) функцией преобразования. Для получения требуемой функции преобразования часто достаточно изменить форму электродов. Отличительной особенностью является малая сила притяжения электродов.
Основным недостатком емкостных преобразователей является малая их емкость и высокое сопротивление. Для уменьшения последнего преобразователи питаются напряжением высокой частоты. Однако это обусловливает другой недостаток – сложность вторичных преобразователей. Недостатком является и то, что результат измерения зависит от изменения параметров кабеля. Для уменьшения погрешности измерительную цепь и вторичный прибор располагают вблизи датчика.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 14427; Нарушение авторских прав?; Мы поможем в написании вашей работы!