КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Индуктивные преобразователи
|
|
|
|
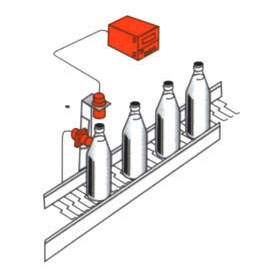
Принцип действия. Принцип действия преобразователей основан на зависимости индуктивности или взаимной индуктивности обмоток на магнитопроводе от положения, геометрических размеров и магнитного состояния элементов их магнитной цепи. Пример использования индуктивного датчика для регистрации крышки бутылки приведен на рис. 5.41. Преимуществами индуктивного метода измерений являются: непрерывность измерения; возможность регистрации непрерывно изменяющихся величин; возможность отсчета действительных отклонений измеряемой величины по шкале прибора; дистанционность измерений; высокая чувствительность и простота конструкции датчиков. Недостатками метода являются сравнительная сложность электрических схем включения датчиков и влияние отклонений параметров схемы на результаты измерения.
|
| Рис. 5.41. Индуктивный датчик определяет бутылки с отсутствующими или ослабленными крышками |
Индуктивный метод контроля может быть бесконтактным и контактным. В бесконтактных индуктивных измерительных системах контролируемая деталь (только из ферромагнитных материалов) непосредственно включена в магнитную цепь, образуя участок магнитопровода. В контактных индуктивных датчиках положение измерительного стержня, зависящее от контролируемого параметра, определяет взаимное положение якоря и катушек датчика и индуктивность системы. Контактные индуктивные датчики могут быть простыми или дифференциальными.
Взаимная индуктивность двух обмоток, расположенных на одном и том же магнитопроводе:
М= w 1 w 2/ Z M,
где w 1 и w 2 – число витков первой и второй обмоток. Магнитное сопротивление определяется выражением
Li=w  /Z M,
/Z M,
где R М – активная составляющая магнитного сопротивления (рассеиванием магнитного потока пренебрегаем); li, si, μ i– соответственно длина, площадь поперечного сечения и относительная магнитная проницаемость i -го участка магнитопровода; μ0 – магнитная постоянная; δ – длина воздушного зазора; s – площадь поперечного сечения воздушного участка магнитопровода; X M= P /(w Ф²) – реактивная составляющая магнитного сопротивления, Р– потери в магнитопроводе, обусловленные вихревыми токами и гистерезисом; w – угловая частота; Ф – магнитный поток в магнитопроводе.
| |
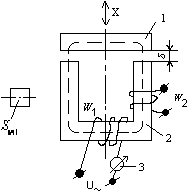
| Рис. 5.42.Индуктивный преобразователь |
Приведенные соотношения показывают, что индуктивность и взаимную индуктивность можно изменять, например, воздействия на длину δ, сечение воздушного участка магнитопровода s, на потери в магнитопроводе и другими путями.
На рис. 5.42 представлен простейший индуктивный преобразователь, состоящий из неподвижного магнитопровода 2, на котором расположена катушка 4 с числом витков w 1, и подвижной пластины 1. Пластина 1 и магнитопровод 2 выполнены из ферромагнитного материала. Последовательно с обмоткой 4 включен миллиамперметр 3. К концам обмотки подано напряжение переменного тока U = const
Индуктивность обмотки датчика
 (5.17)
(5.17)
где Ф – магнитный поток, I – ток, протекающий по катушке.
В индуктивных датчиках переменной величиной является индуктивное сопротивление:
X =w Lx,
где w – частота переменного тока; Lx – переменная индуктивность датчика.
Индуктивность катушек при ненасыщенном магнитопроводе:
Lx =(4p10–9 w 2 s)/d,
где w –число витков катушки; s –площадь поперечного сечения воздушного зазора, см2; d–переменная длина воздушного зазора, см.
Величину магнитного потока можно определить, используя выражение
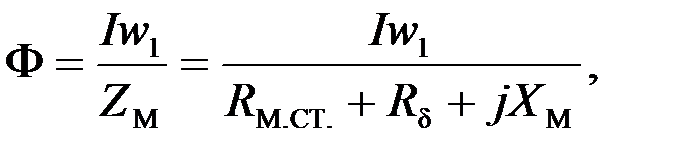 (5.18)
(5.18)
где  – магнитное сопротивление магнитопровода;
– магнитное сопротивление магнитопровода;  – число витков катушки;
– число витков катушки;  – магнитное сопротивление участков из стали;
– магнитное сопротивление участков из стали;  – магнитное сопротивление воздушных участков магнитопровода;
– магнитное сопротивление воздушных участков магнитопровода;  – реактивная составляющая сопротивления магнитной цепи, обусловленная потерями на вихревые токи и гистерезис.
– реактивная составляющая сопротивления магнитной цепи, обусловленная потерями на вихревые токи и гистерезис.
С учетом (5.18) уравнение (5.17) примет вид
 (5.19)
(5.19)
где  –величина воздушного зазора между подвижной и неподвижной частями магнитопровода; s –площадь воздушного зазора;
–величина воздушного зазора между подвижной и неподвижной частями магнитопровода; s –площадь воздушного зазора;  –магнитная проницаемость воздуха;
–магнитная проницаемость воздуха;
 ,
,
здесь  –длина неподвижной и подвижной частей магнитопровода, определенная по средней линии;
–длина неподвижной и подвижной частей магнитопровода, определенная по средней линии;  –магнитная проницаемость материала магнитопровода;
–магнитная проницаемость материала магнитопровода;  –площадь сечения неподвижной и подвижной частей магнитопровода.
–площадь сечения неподвижной и подвижной частей магнитопровода.
Если подвижный магнитопровод жестко соединить с объектом, перемещение x которого измеряется (рис. 5.42), то при изменении x изменяется и величина воздушного зазора  , что приведет к изменению магнитного сопротивления
, что приведет к изменению магнитного сопротивления  , а следовательно, и индуктивности
, а следовательно, и индуктивности  катушки (см. уравнение 5.19)
катушки (см. уравнение 5.19)
При изменении индуктивности катушки будет изменяться и ее индуктивное сопротивление  , а следовательно, и величина тока, протекающего по катушке, имеет вид
, а следовательно, и величина тока, протекающего по катушке, имеет вид
 ,
,
где  –активное сопротивление цепи;
–активное сопротивление цепи;  –частота переменного напряжения, питающего катушку преобразователя.
–частота переменного напряжения, питающего катушку преобразователя.
Если на магнитопровод (рис. 5.42) поместить не одну, а две обмотки с числом витков w 1 и w 2 соответственно, то при изменении магнитного сопротивления магнитопровода  будет изменяться взаимная индуктивность М между обмотками:
будет изменяться взаимная индуктивность М между обмотками:
 .
.
Преобразователи, преобразующие значение изменяемого механического перемещения x в значение взаимной индуктивности обмоток, называются трансформаторными.
Очевидно, что с ростом зазора  величина
величина  будет возрастать, взаимная индуктивность
будет возрастать, взаимная индуктивность  будет уменьшаться, следовательно, будет уменьшаться и величина ЭДС, наводимая в обмотке
будет уменьшаться, следовательно, будет уменьшаться и величина ЭДС, наводимая в обмотке  .
.
Преобразователь, изображенный на рис. 5.42, называется преобразователем с замкнутой магнитной цепью или преобразователем с малым воздушным зазором. Измеряемое перемещение  таких преобразователей обычно лежит в пределах 1–5 мм.
таких преобразователей обычно лежит в пределах 1–5 мм.
|
| Рис.5.43. Преобразователь с разомкнутой магнитной цепью |
На рис. 5.43, а представлен преобразователь с разомкнутой магнитной цепью. Он представляет собой катушку 1, внутри которой может перемещаться сердечник 2, выполненный из магнитно-мягкого материала. Сердечник связан с объектом, перемещение x которого измеряется. Перемещение сердечника вызывает изменение индуктивности катушки. Такой тип преобразования применяется для измерения перемещений  от 5 до 100 мм.
от 5 до 100 мм.
Для вышерассмотренных преобразователей характерно, что сопротивление магнитных участков магнитопровода  и реактивная составляющая сопротивления магнитной цепи
и реактивная составляющая сопротивления магнитной цепи  много меньше, чем сопротивление воздушного участка магнитопровода, т.е.
много меньше, чем сопротивление воздушного участка магнитопровода, т.е.
 и
и  .
.
В связи с этим уравнение (5.19) можно представить в виде
 . (5.20)
. (5.20)
Из уравнения (5.20) видно, что индуктивность L и индуктивное сопротивление катушки w 1 c ростом зазора  изменяется по гиперболическому закону (рис. 5.44), т.е. функция преобразования нелинейна, что затрудняет ее практическое использование в измерительных приборах. На рис. 5.44 представлена зависимость комплексного сопротивления
изменяется по гиперболическому закону (рис. 5.44), т.е. функция преобразования нелинейна, что затрудняет ее практическое использование в измерительных приборах. На рис. 5.44 представлена зависимость комплексного сопротивления  обмотки
обмотки  индуктивного преобразователя от величины воздушного зазора
индуктивного преобразователя от величины воздушного зазора  . Для уменьшения погрешности нелинейности рабочий диапазон измеряемых перемещений ограничивают величиной
. Для уменьшения погрешности нелинейности рабочий диапазон измеряемых перемещений ограничивают величиной  , где
, где  –начальное значение воздушного зазора в магнитной цепи. В этом диапазоне функцию преобразования z 1=j(d) с погрешностью порядка 1% можно аппроксимировать прямой линией.
–начальное значение воздушного зазора в магнитной цепи. В этом диапазоне функцию преобразования z 1=j(d) с погрешностью порядка 1% можно аппроксимировать прямой линией.
|
| Рис.5.44. Зависимость индуктивного сопротивления z катушки w от зазора d |
Описанный одинарный индуктивный преобразователь является электромагнитом, якорь в котором испытывает усилие притяжения со стороны электромагнита. Сила притяжения определяется производной от энергии магнитного поля по перемещению якоря и возрастает с увеличением чувствительности, нелинейно зависит от перемещения якоря и может явиться причиной погрешности преобразователя, предшествующего индуктивному. Таким образом, данный тип индуктивных преобразователей имеет ряд недостатков: их функции преобразования нелинейны; аддитивные погрешности, в частности погрешность реального преобразователя, вызванная температурным изменением активного сопротивления обмотки, велики; сила притяжения якоря значительна.
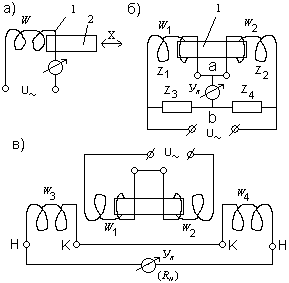
Для устранения этих недостатков используют дифференциальные индуктивные преобразователи. Они состоят из двух одинаковых одинарных преобразователей, которые имеют общий подвижный элемент. На рис. 5.43, б представлена схема такого преобразователя.
Две идентичные по параметрам катушки с числом витков  и
и  имеют общий стальной сердечник 1, симметрично расположенный внутри катушек. В этом случае индуктивные сопротивление катушек
имеют общий стальной сердечник 1, симметрично расположенный внутри катушек. В этом случае индуктивные сопротивление катушек  и
и  равны, равны и их комплексные сопротивления
равны, равны и их комплексные сопротивления  и
и  . При включении этих катушек в качестве плеч мостовой схемы (рис.5.43, б), в которой z3=z4 – постоянные комплексные сопротивления, напряжение между точками "а" и "б" измерительной диагонали моста будет равно нулю, и ток указателя УК будет также равен нулю.
. При включении этих катушек в качестве плеч мостовой схемы (рис.5.43, б), в которой z3=z4 – постоянные комплексные сопротивления, напряжение между точками "а" и "б" измерительной диагонали моста будет равно нулю, и ток указателя УК будет также равен нулю.
При перемещении якоря одна индуктивность L 1 возрастает, другая L 2– уменьшается. Так, при смещении сердечника 1 на величину измеряемого перемещения x вправо индуктивное сопротивление катушки  уменьшится, а катушки
уменьшится, а катушки  – возрастет, что приведет к разбалансу мостовой измерительной схемы и появлению тока
– возрастет, что приведет к разбалансу мостовой измерительной схемы и появлению тока  в измерительной диагонали моста «а–б». Ток указателя для дифференциальной схемы включения определяется выражением
в измерительной диагонали моста «а–б». Ток указателя для дифференциальной схемы включения определяется выражением
 ,
,
где  ,
,  – комплексные сопротивления катушек w 1 и w 2 дифференциального индуктивного преобразователя перемещений; K 1–коэффициент, зависящий от величины комплексных сопротивлений плеч мостовой схемы и от внутреннего сопротивления указателя.
– комплексные сопротивления катушек w 1 и w 2 дифференциального индуктивного преобразователя перемещений; K 1–коэффициент, зависящий от величины комплексных сопротивлений плеч мостовой схемы и от внутреннего сопротивления указателя.
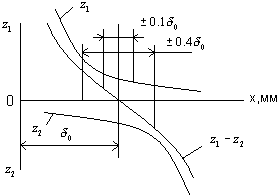
Благодаря использованию этих цепей уменьшается аддитивная погрешность, улучшается линейность функции преобразования, в 2 раза возрастает чувствительность и уменьшается сила притяжения якоря. Графики изменения комплексных сопротивлений z1 и z2 катушек w 1 и w 2 дифференциального индуктивного преобразователя от перемещения х представлены на рис. 5.44. На этом же рисунке изображена функция, характеризующая закономерность изменения разности z 1- z2 от измеряемого перемещения x.
Из приведенного графика следует, что зависимость z 1–z2=j(x) имеет более линейный характер, чем каждая из функции z 1=j(x) и z2=j(x). Поэтому при той же допустимой погрешности аппроксимации функции преобразования (~1%), что и в обычном индуктивном преобразователе, рабочий диапазон дифференциального преобразователя расширяется примерно в 4 раза (рис. 5.44): с  до
до  . Кроме того, в таком преобразователе существенно снижаются погрешности, обусловленные влиянием изменения температуры окружающей среды, поскольку при этом параметры w 1 и w 2 изменяются одинаково как по величине, так и по знаку и это не приводит к появлению дополнительной аддитивной погрешности.
. Кроме того, в таком преобразователе существенно снижаются погрешности, обусловленные влиянием изменения температуры окружающей среды, поскольку при этом параметры w 1 и w 2 изменяются одинаково как по величине, так и по знаку и это не приводит к появлению дополнительной аддитивной погрешности.
Погрешность индуктивных преобразователей. Температурная погрешность индуктивных преобразователей в основном обусловлена изменением активной составляющей их сопротивления. Эта погрешность аддитивна и уменьшается при применении мостовых схем. Кроме того, при изменении температуры изменяется магнитная проницаемость стали, что приводит к некоторому дополнительному изменению аддитивной и мультипликативной погрешностей.
При изменении напряжения питания меняется магнитная проницаемость магнитопровода преобразователя, а следовательно, его сопротивление и чувствительность. Изменяется также чувствительность мостовой измерительной цепи. Изменение сопротивления приводит к аддитивной погрешности и компенсируется мостовой цепью. Изменение чувствительности создает мультипликативную погрешность. Для ее уменьшения либо стабилизируют напряжение источника питания моста, либо применяют компенсационные схемы измерения.
Изменение частоты питающего напряжения приводит к изменению сопротивления резисторов, включенных в мост, и меняет чувствительность. Малую погрешность имеют мостовые схемы (рис. 5.43), у которых чувствительность в режиме холостого хода S сх х не зависит от параметров цепи. У других схем для уменьшения погрешности нужно стабилизировать частоту питающего напряжения.
При перемещении якоря преобразователя изменяется выходное напряжение моста. При среднем положении якоря должно быть U вых=0. Однако практически имеется небольшое напряжение, что приводит к аддитивной погрешности измерительного моста. Для балансировки мостов переменного тока необходима раздельная регулировка действительной и мнимой составляющих его выходного напряжения. В мостах с индуктивными преобразователями одна составляющая регулируется перемещением якоря преобразователя, другая – путем регулировки других сопротивлений (например, сопротивлений z 3 или z 4 в схеме рис. 5.43, б). Если регулировка сделана недостаточно тщательно, то изменением положения якоря нельзя полностью сбалансировать схему. Другая причина погрешности моста заключается в том, что в питающем напряжении помимо напряжения с основной частотой имеются составляющие с кратными частотами и с частотой промышленной сети. Реальный мост переменного тока, питающийся таким напряжением, полностью сбалансировать трудно вследствие наличия несбалансированных составляющих с частотами, отличными от основной.
Конструкция. Конструкция преобразователя определяется главным образом значением измеряемого перемещения. Габариты преобразователя выбирают, исходя из необходимой мощности выходного сигнала и других технических требований.
Индуктивный преобразователь представляет собой катушку индуктивности (дроссель), полное сопротивление которой изменяется при взаимном относительном перемещении элементов магнитопровода. Имеются две группы преобразователей: с изменяющейся индуктивностью и с изменяющимся активным сопротивлением. Пример схемы преобразователя первой группы показан на рис. 5.41. Рабочее перемещение в преобразователях с переменным зазором – 0,01 – 10мм. При реализации этих преобразователях могут быть использованы ферритовые элементы 2, выпускаемые промышленностью (рис. 5.45). Для изготовления подвижного сердечника 1 используется основание такого же элемента (2), стенки которого зашлифованы.
|
| Рис. 5.45. Индуктивный преобразователь первого типа |
|
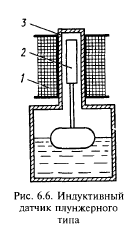
| Рис. 5.46. Индуктивный датчик плунжерного типа |
Другая модификация индуктивных датчиков, которую применяют для измерения больших перемещений, в виде катушки с подвижным внутренним сердечником (плунжерный преобразователь) показана на рис. 5.46. Преобразователь представляет собой катушку 1,из которой может выдвигаться ферромагнитный сердечник 2 (плунжер). Если сердечник полностью введен внутри катушки, на которую намотана обмотка, то ее индуктивное сопротивление максимально, а ток в обмотке имеет минимальное значение. При выводе сердечника из катушки индуктивное сопротивление уменьшается, а ток соответственно увеличивается. Этот тип преобразователя применяется для измерений значительных перемещений сердечника (от 10 до 100 мм). Их также называют индуктивными датчиками с разомкнутым магнитопроводом, поскольку даже при максимальной индуктивности обмотки основной путь магнитный поток проходит по воздуху. С этой точки зрения рассмотренные выше датчики с обмоткой на неподвижном сердечнике и с перемещающимся якорем (рис. 5.45) называют индуктивными датчиками с замкнутым магнитопроводом.
У плунжерных датчиков есть одна очень важная особенность: они позволяют получить информацию о перемещении из замкнутого, изолированного пространства. Пусть, например, надо измерить уровень какой-либо очень вредной жидкости, пары которой ядовиты, да еще находятся под большим давлением. Тогда катушку 1 плунжерного датчика (рис. 5.46) надевают на разделительную трубку 3из нержавеющей немагнитной стали, внутри которой и перемещается сердечник 2из ферромагнитного материала. Перемещение сердечника изменяет индуктивность катушки, а разделительная трубка не экранирует магнитное поле, поскольку материал трубки имеет очень малую магнитную проницаемость. Таким образом, обмотка датчика, все другие электрические элементы измерительной схемы размещены в обычных, нормальных условиях. В связи с этим про плунжерные датчики говорят, что они позволяют вывести перемещение из замкнутого объема. В этом основное преимущество плунжерных датчиков перед датчиками с замкнутым магнитопроводом. А вот по чувствительности, мощности выходного сигнала плунжерные датчики уступают индуктивным датчикам с замкнутым магнитопроводом. С помощью плунжерных датчиков могут быть реализованы такие же дифференциальные и мостовые схемы, какие были рассмотрены.
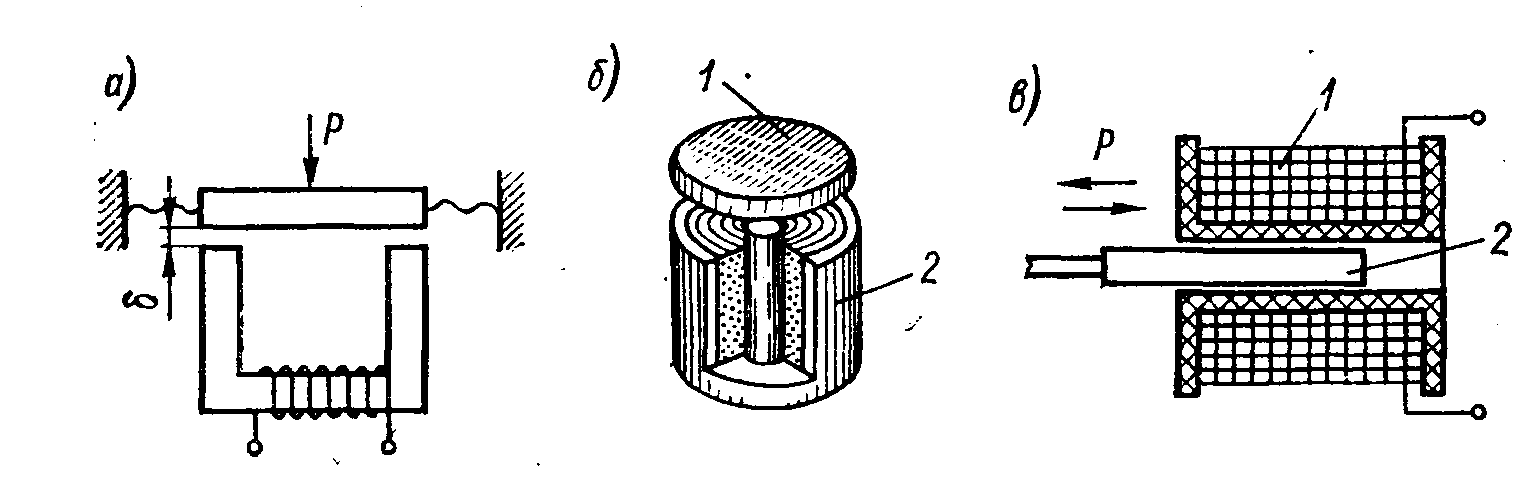
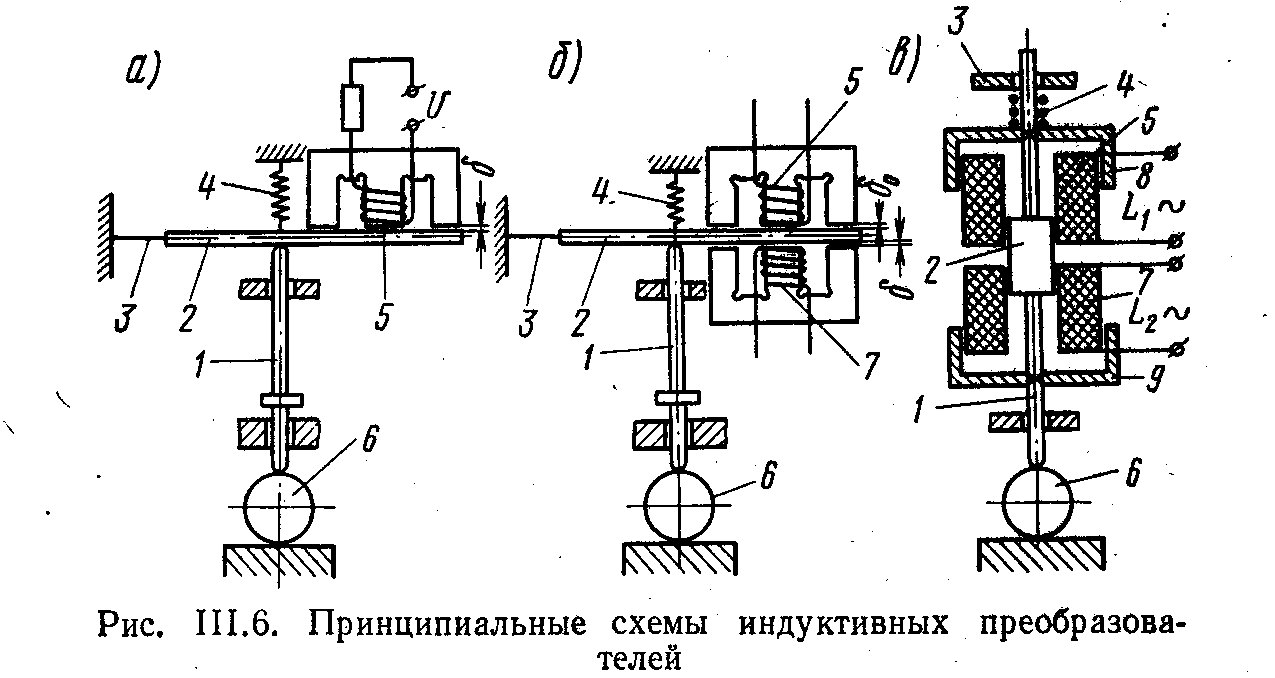
На рис. 5.47 схематически показаны конструкции различных типов индуктивных преобразователей. Индуктивный преобразователь (рис. 5.47, а) с переменной длиной воздушного зазора δ характеризуется нелинейной зависимостью L = f (δ). Такой преобразователь применяется при перемещениях якоря на расстояние 0,01 – 5 мм. Значительно меньшей чувствительностью, но линейной зависимостью L = f (δ)отличаются преобразователи с переменным сечением воздушного зазора (рис. 5.47, б). Эти преобразователи используются при перемещениях якоря до 10– 15 мм.
|
| Рис. 5.47. Индуктивные преобразователи с изменяющейся длиной зазора (а), с изменяющимся сечением зазора (б), плунжерный дифференциальный (в) |
В индуктивных дифференциальных преобразователях (рис. 5.47, б) под воздействием измеряемой величины одновременно и притом с разными знаками изменяются два зазора двух электромагнитов. Верхний торец измерительного стержня 1 воздействует на якорь 2, подвешенный на плоской пружине 3. Изменение положения якоря, определяемое размером контролируемой детали 6, вызовет изменение воздушного зазора между якорем 2 и катушкой 5 простого датчика или перераспределение воздушного зазора между катушками 5 и 7 и якорем 2 дифференциального датчика. При уменьшении зазора между якорем и катушкой 5 зазор между якорем и катушкой 7 увеличивается. Изменяется одновременно индуктивность обеих катушек, поэтому чувствительность дифференциального датчика вдвое выше, чем простого. Измерительное усилие создается пружиной 4.
На рис. 5.47, в изображена принципиальная схема дифференциального индуктивного датчика плунжерного типа с экранирующими кольцами. На измерительном стержне 1 датчика, перемещающемся в направляющих 3, закреплены ферритовый якорь 2 и два медных экранирующих кольца 8 и 9. Этот датчик обладает высокой чувствительностью, так как изменение индуктивности L 1 и L 2 обеих катушек зависит от совместного действия двух факторов: положений сердечника и колец. Датчик питается высокочастотным напряжением 50 – 100 кГц.
Сила магнитного притяжения в простом датчике может быть значительной и измерительному стержню, перемещающему якорь, приходится ее преодолевать, что вызывает необходимость увеличения измерительного усилия и является одним из недостатков простого индуктивного датчика. В дифференциальном датчике результирующая сила магнитных притяжений якоря в воздушных промежутках со стороны электромагнитов уравновешивается, т.е. оказывается меньше, чем в недифференциальных, и измерительный стержень должен преодолевать лишь силу тяжести подвижной системы датчика и усилие в пружинном шарнире. Дифференциальные преобразователи в сочетании с соответствующей схемой (обычно мостовой) имеют более высокую чувствительность, чем обычные преобразователи, дают возможность уменьшить нелинейность функции преобразования, испытывают меньшее влияние внешних факторов.
Индуктивные преобразователи используются для преобразования перемещения и других неэлектрических величин, которые могут быть преобразованы в перемещение (усилие, давление, момент и т. д.) и характеризуются простотой и надежностью в работе. По сравнению с другими преобразователями индуктивные преобразователи отличаются большой мощностью преобразователя 1 – 5 ватт, что позволяет использовать сравнительно малочувствительный указатель на выходе измерительной цепи. Недостатком их является наличие обратного воздействия преобразователя на измеряемый объект (воздействие электромагнита на якорь) и влияние инерции якоря на частотную характеристику прибора.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 8631; Нарушение авторских прав?; Мы поможем в написании вашей работы!