КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Индукционные преобразователи
|
|
|
|
Принцип действия и конструкция. Индукционнымпреобразователем называется преобразователь, принцип действия которого основан на законе электромагнитной индукции. В общем случае индукционный преобразователь – катушка с сердечником (рис. 5.50), которая характеризуется обобщённым параметром у и ЭДС, индуктируемая как в результате изменения во времени внешнего магнитного поля, так и изменения во времени параметра у преобразователя. При воздействии входной величины на преобразователь изменяется потокосцепление Y катушки с внешним по отношению к катушке магнитном полем. При этом вкатушке наводится ЭДС:
|
| Рис. 5.50. Принцип действия индукционного преобразователя |
е = –  .
.
Потокосцепление равно
Y= w Ф= w B S,
где w – число витков катушки; Ф – проходящий через нее поток; S – площадь, через которую проходит этот поток; B индукция магнитного поля. ЭДС в катушке может наводиться при изменении во времени любой из перечисленных величин w, B, S.
Индукционные преобразователи служат для преобразования линейной dx/dt или угловой d a/ dt скорости перемещения катушки относительно магнитного поля в ЭДС. Они являются генераторными преобразователями и преобразуют механическую энергию в электрическую.
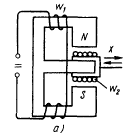
Для изменения индукции переменного магнитного поля применяется преобразователь со стандартными неподвижными обмотками. Индукционный преобразователь для изменения параметров магнитного преобразователя в воздушном пространстве обычно выполняется в виде катушек различной формы, начало и конец обмотки которых находятся в одном месте.
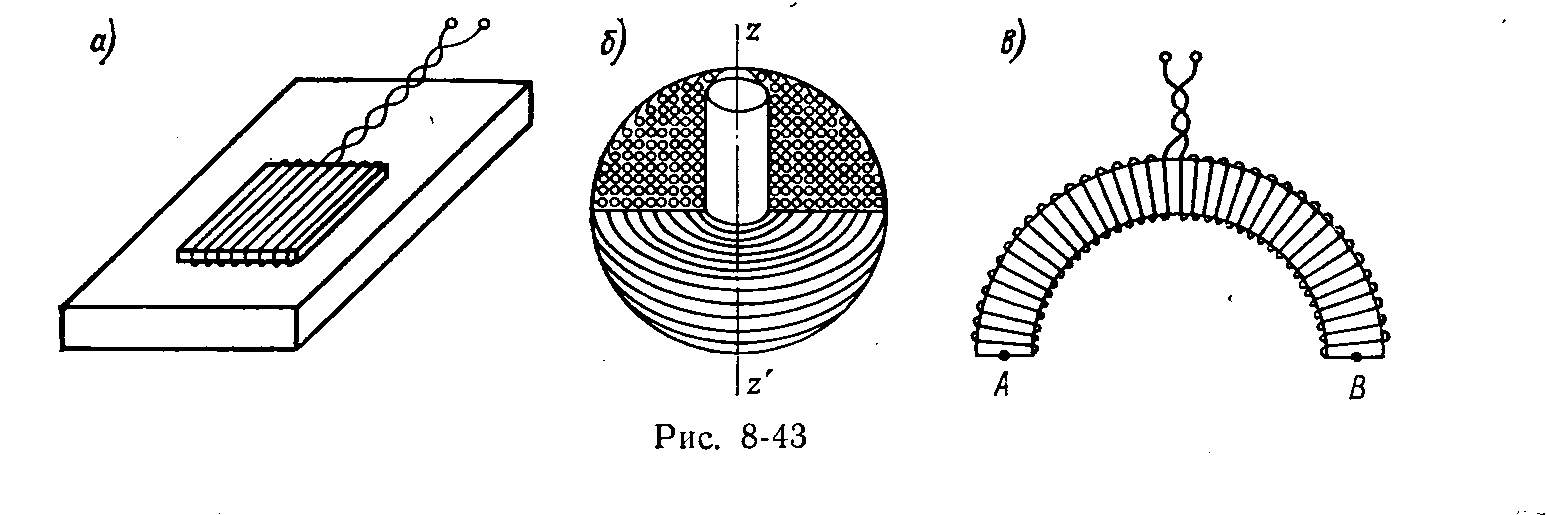
Для измерения напряжённости магнитного поля при испытании ферромагнитных материалов используются плоские катушки, помещённые на поверхности испытуемого образца. При этом измеренная в воздухе напряженность принимается равной напряженности поля на поверхности образца.
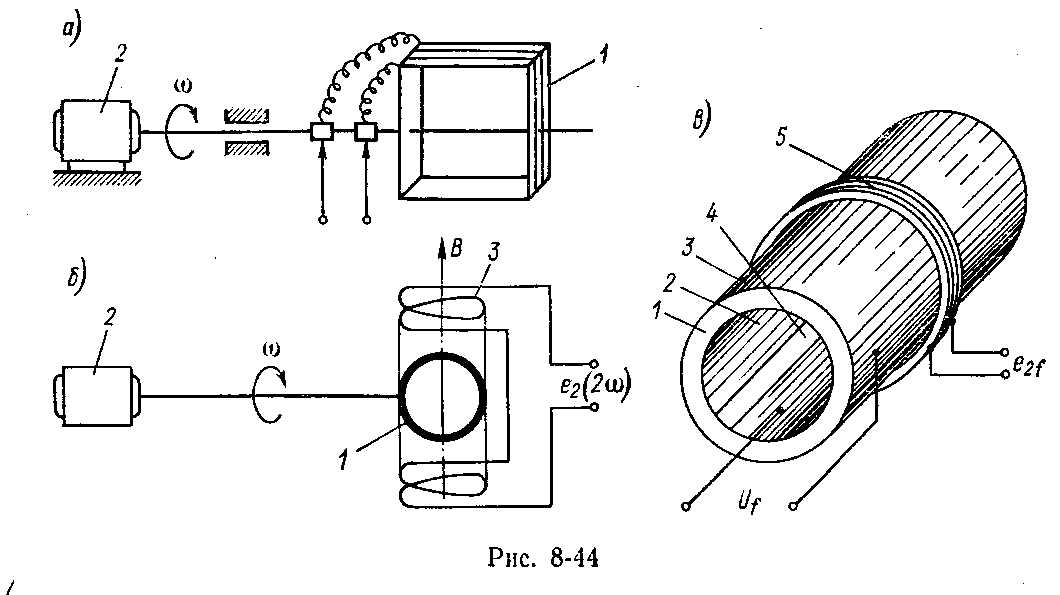
Для измерения магнитной индукции и напряженности магнитных полей целесообразно использовать шаровые индукционные преобразователи (рис. 5.51). Примером реализации индукционного пре образователя является преобразователь для изменения магнитных действий силы, которая выполняется в виде равномерной обмотки. На гибком каркасе обмотка выполняется с четным числом слоёв так, чтобы выводы находились в средине обмотки. Для изменения параметров постоянного магнитного поля используются индукционные преобразователи с вращающимися или чувствительными элементами.
|
| Рис. 5.51. Измерители магнитной индукции и напряженности полей |
Различают ряд типов преобразователей. Рассмотрим их.
| ||||
| Рис. 5.52. Преобразователь скорости вибрации |
Преобразователи скорости вибрации. Индукционные преобразователи генерируют ЭДС только при перемещении катушки в магнитном поле. По этой причине преобразователи этого типа могут служить для преобразования линейной скорости в ЭДС на небольших длинах пути. Обычно они применяются для измерения скорости вибрации, когда ее амплитуда не превышает нескольких сантиметров. Одна из конструктивных схем преобразователя вибрационной скорости показана на рис. 5.52. Преобразователь имеет постоянный магнит 1,с полюсными наконечниками 2, цилиндрического стального сердечника 3 и катушки 4. Устройство преобразователя аналогично устройству магнитоэлектрического измерительного механизма. При перемещении катушки вдоль оси сердечника ее потокосцепление изменяется и в ней индуцируется ЭДС, пропорциональная скорости вибрации.
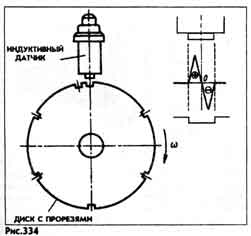
Тахометрические преобразователи. В качестве датчика частоты вращения двигателя чаще всего используется индукционный датчик (рис. 5.53), работающий совместно с диском из магнитомягкого материала, имеющего прорези, соответствующие положениям поршней каждого цилиндра в верхней мертвой точке (рис. 5.53). Диск устанавливается на торце коленчатого вала двигателя. Индукционный датчик представляет собой индукционную катушку, расположенную около постоянного магнита. При вращении диска в момент прохода прорези вблизи датчика изменяется величина воздушного зазора, что вызывает изменение магнитной индукции и формирование электрического импульса в индукционной катушке. Импульс – двуполярный, его полуволны расположены симметрично относительно оси, проходящей через нулевую точку. Нулевая точка соответствует центру прорези. Амплитуда и частота ЭДС пропорциональны частоте вращения ротора. Частота ЭДС определяется соотношением f=nр /60, где n – частота вращения, об/мин; р – число пар полюсов.
|
| Рис. 5.53. Тахометрический преобразователь |
Подобные датчики очень надежны в эксплуатации, просты в конструктивном отношении, имеют невысокую стоимость изготовления, могут работать в диапазоне температур от –60 °С до +250°С. Датчик очень критичен к величине зазора между индукционной катушкой и вращающимся диском и к величине реактивного сопротивления элементов датчика (в том числе и от емкостного сопротивления соединительного провода). Датчики такого типа имеют очень высокую разрешающую способность и чувствительность, но в то же время имеют ограничения по температурному диапазону использования (рис. 5.54).
Погрешность индукционных преобразователей. ЭДС индукционных преобразователей пропорциональна скорости перемещения катушки лишь при условии, что индукция В постоянна на протяжении всего пути ее перемещения. Непостоянство индукции вызывает возникновение погрешности.
Погрешность индукционных преобразователей также во многом зависит от тока, который потребляет вторичный преобразователь. Проходя по измерительной обмотке индукционного преобразователя, этот ток создает магнитное поле, которое по правилу Ленца направлено встречно направлению основного поля и производит размагничивающее действие. Вследствие этого суммарная индукция уменьшается, уменьшается и ЭДС преобразователя. Это явление, имеющее место в электрических машинах и, вчастности, в тахометрических преобразователях называется реакцией якоря. Вследствие реакции якоря уменьшается чувствительность тахометрического преобразователя и его функция преобразования становится нелинейной, что приводит к погрешности, для уменьшения которой следует уменьшить ток преобразователя. Имеются также конструктивные методы уменьшения этой погрешности.

|
| Рис.5.54. Устройство для измерения угловой скорости вращающихся частей машин, механизмов и приборов при помощи электромагнитного тахометрического датчика (тахометр ЦД9902) |
Описанный вид погрешности присущ тахометрическим преобразователям, поскольку их вторичными приборами служат электромеханические приборы с большим потреблением мощности.
Влияние тока нагрузки на функцию преобразования преобразователей вибрации меньше, чем на функцию преобразования тахометрических преобразователей. Нагрузкой преобразователей вибрации обычно являются электронные усилители. Они имеют большое входное сопротивление, которое ограничивает ток преобразователя и тем самым уменьшает погрешность.
Если нагрузка индукционного преобразователя потребляет значительный ток, то может возникнуть погрешность вследствие изменения внутреннего сопротивления преобразователя, поскольку изменяется падение напряжения на его внутреннем сопротивлении. Изменение внутреннего сопротивления может быть обусловлено температурными изменениями сопротивления измерительной обмотки и сопротивления линии связи со вторичным прибором. Внутреннее сопротивление тахометрического преобразователя постоянного тока нестабильно также вследствие изменения сопротивления коллектора.
При изменении частоты вращения синхронного тахометрического преобразователя изменяется как ЭДС, так и ее частота. При изменении частоты меняются его входное сопротивление и входное сопротивление его нагрузки. Изменения сопротивлений могут привести к нелинейной функции преобразования прибора в целом, даже если ЭДС тахометрического преобразователя линейно зависит от измеряемой скорости.
Выходной величиной синхронных тахометрических преобразователей является либо значение генерируемой ЭДС, либо ее частота. В последнем случае в качестве вторичного преобразователя используется частотомер. Применяемые стрелочные частотомеры не должны изменять свои показания при изменении напряжения.
Таким образом, погрешность индукционных преобразователей в значительной степени зависит от режима, в котором они работают. Наибольшая погрешность возникает в режиме, при котором через нагрузку течет значительный ток. Однако для работы в таком режиме используют наиболее простой вторичный преобразователь. Меньшие погрешности имеют место в режиме холостого хода, когда ток в измерительной катушке практически отсутствует. При работе в таком режиме требуется более сложная и дорогая аппаратура, должны использоваться измерительные механизмы повышенной чувствительности или усилительные устройства.
При измерении частоты вращения вала наименьшую погрешность можно получить, если в качестве выходной величины тахометрического преобразователя используется частота изменения ЭДС, а в качестве вторичного преобразователя – цифровой частотомер. При этом исключается влияние нестабильности величины выходного напряжения преобразователя и используется высокая точность цифрового частотомера. Однако в этом случае требуется наиболее сложная и дорогая аппаратура.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 11456; Нарушение авторских прав?; Мы поможем в написании вашей работы!