КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Резистивные преобразователи
|
|
|
|
Принцип действия и конструкция. Сопротивление резистивному току одноэлементного резистивного преобразователя зависит от его длины  , поперечного сечения
, поперечного сечения  , удельного сопротивления
, удельного сопротивления 
R 0=  ,
,
или  – если сечение S постоянно по всей длине.
– если сечение S постоянно по всей длине.
Применяемые в настоящее время пленочные резисторы, толщина которых определяется технологией нанесения пленки, а ширина и длина сравнимы по значениям, характеризуется сопротивлением площади, имеющей равную ширину и длину. Таким образом, сопротивление  резистора, имеющего ширину
резистора, имеющего ширину  и длину
и длину  , равно
, равно
 .
.
Резисторы погашают мощность тока, поэтому одним из основных параметров резистивных преобразователей является мощность, выделяемая на резисторе при включении его в измерительную цепь, в которой определяется мощность:
 ,
,
где  – ток и падение напряжения на резисторе.
– ток и падение напряжения на резисторе.
Значение дополнительной мощности  на резисторе задается дополнительным перегревом, конструктивно выглядит следующим образом (рис. 5.11). Эквивалентная схема (рис. 5.12) резистивного преобразователя учитывает то, что при включении резистора в цепь последовательно с его сопротивлением
на резисторе задается дополнительным перегревом, конструктивно выглядит следующим образом (рис. 5.11). Эквивалентная схема (рис. 5.12) резистивного преобразователя учитывает то, что при включении резистора в цепь последовательно с его сопротивлением  , оказывается включенным сопротивление проводов
, оказывается включенным сопротивление проводов  , контактов
, контактов  и
и  , а параллельно
, а параллельно  – сопротивление изоляции.
– сопротивление изоляции.
Рис. 5.12. Схема замещения резистивного преобразователя:  – сопротивление контакта; – сопротивление контакта;  – сопротивление провода – сопротивление провода
| ||
| Рис. 5.11. Реализация резистивного преобразователя |
Типы резистивного преобразователя. Принцип действия и конструкция. Существует три разновидности резистивных преобразователей.
1. Контактные преобразователи, в которых измеряемые механические перемещения преобразуются в замыкание или размыкание контактов, управляющих электрической цепью. Таким образом, естественной входной величиной контактных преобразователей является перемещение.
| |
| Рис. 5.13. Однопредельный контактный преобразователь |
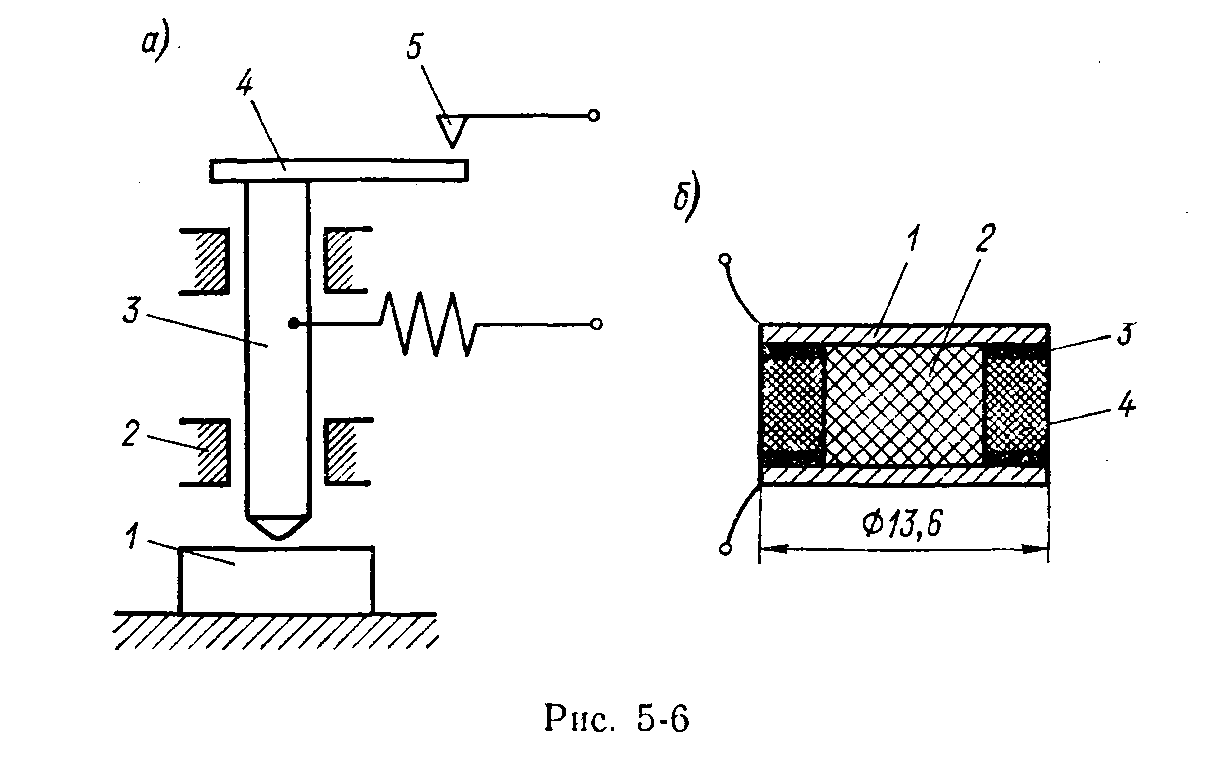
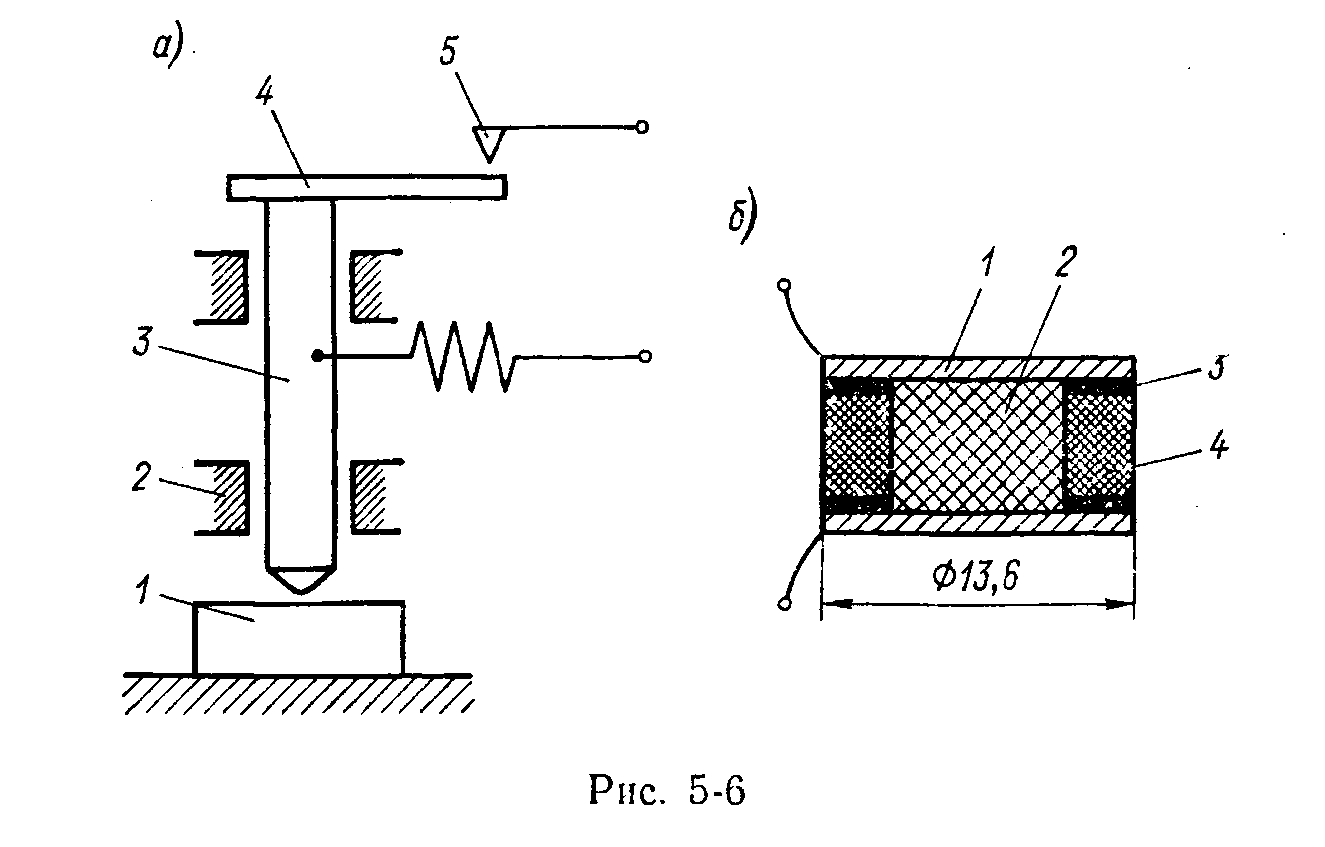
Пример однопредельного контактного преобразователя приведен на рис. 5.13 и имеет пару контактов электромагнитного реле 4, 5, при замыкании которых происходит регистрация изделия 1. При попадании изделия под шток 3, он переместится в направляющих 2 и укрепленный на нем контакт 4 придет в соприкосновение с контактом 5, при этом сопротивление между контактами изменится от  до малого значения, определенного контактным сопротивлением.
до малого значения, определенного контактным сопротивлением.
В обычных электромагнитных реле часто отказ возникает из-за контактов, которые подвергаются вредным воздействиям окружающей среды (окислению, загрязнению, коррозии и др.). Существенно повысить надежность реле можно за счет герметизации контактов. Так как в этом случае невозможно механически связать контактный узел с электромагнитным приводом, то необходимо для перемещения герметизированных контактов использовать силы электромагнитного притяжения. Контактные пластины для этого изготовляются из ферромагнитного материала. Таким образом, контакты становятся магнитоуправляемыми. К магнитоуправляемым контактам относятся герконы (т. е. герметизированные контакты). Применяются они для тех же целей, что и мощные электромагнитные реле. Они и возникли в результате совершенствования контактных электромагнитных устройств и стремления свести к минимуму их недостатки: сравнительно небольшой срок службы (до 107 срабатываний), невысокое быстродействие (десятки миллисекунд), потребление энергии в течение всего периода притяжения якоря и необходимость периодического обслуживания.
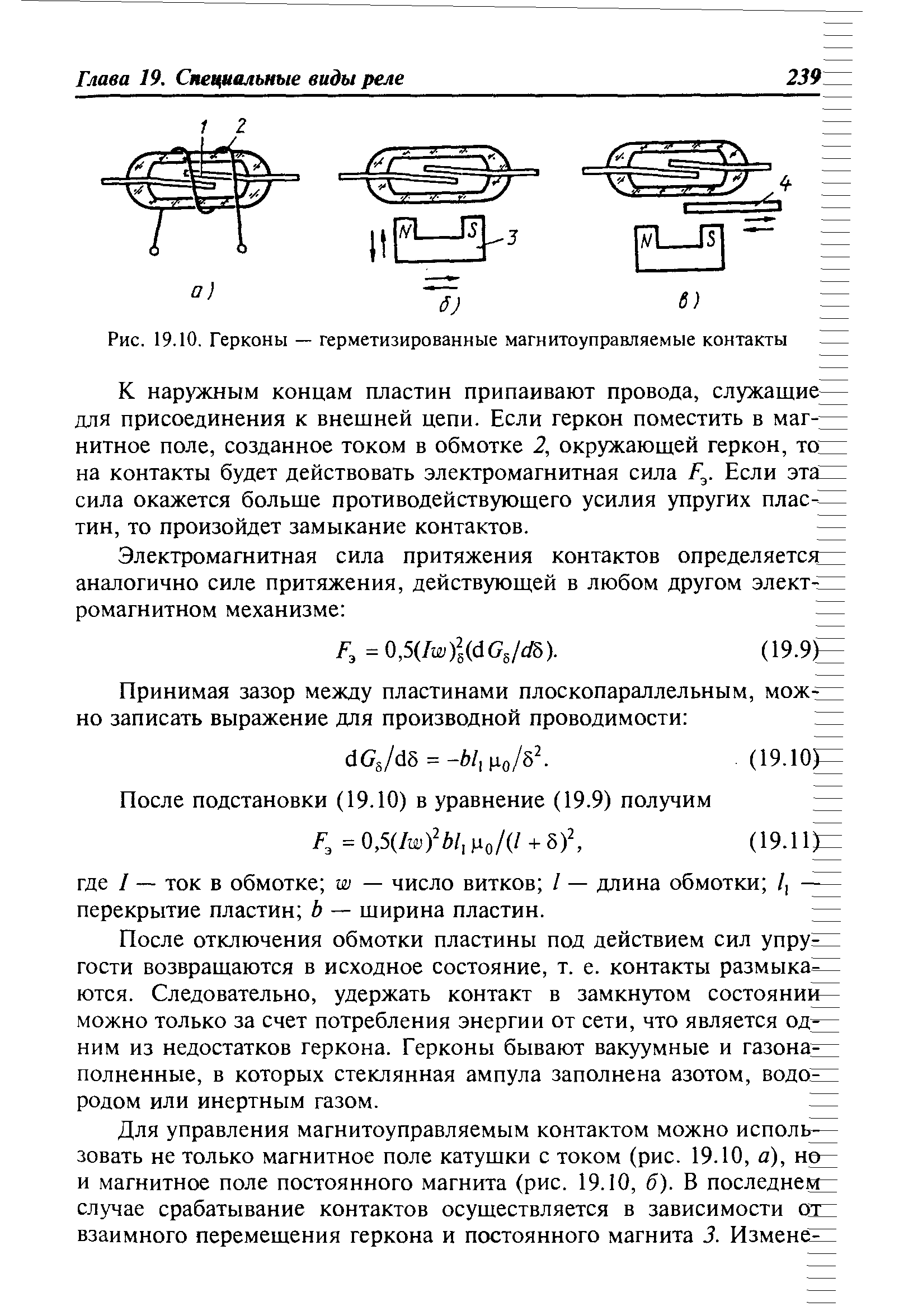
Геркон (рис. 5.14, а)представляет собой впаянные в стеклянную ампулу (баллон), имеющую диаметр 3 мм, длину до 20 мм, пермаллоевые контактные пластины 1, которые одновременно являются токоподводами, контактами и магнитопроводом. Пластины впаяны в ампулу таким образом, чтобы контакты, в качестве которых используются внутренние концы пластин, покрытые золотом, радием или вольфрамом, находились на некотором расстоянии друг от друга, т. е. были разомкнуты. Пластины деформируются под воздействием контактного поля, что приводит к замыканию контакта.
Токи переключения составляют от  до
до  А при напряжении до 220 В. Сопротивление между контактами не превышает 1 Ом, а при разомкнутом состоянии составляет 109 Ом. При замыкании контактов наблюдается примерно 60 скоков – дребезг контактов, время которого составляет 100–200 мксек. Дребезг контакта приводит к возникновению дополнительного шума, кроме этого при наличии разницы температур между выводами контактов возникает термоЭДС
А при напряжении до 220 В. Сопротивление между контактами не превышает 1 Ом, а при разомкнутом состоянии составляет 109 Ом. При замыкании контактов наблюдается примерно 60 скоков – дребезг контактов, время которого составляет 100–200 мксек. Дребезг контакта приводит к возникновению дополнительного шума, кроме этого при наличии разницы температур между выводами контактов возникает термоЭДС  40 мкВ при температурном градиенте 1
40 мкВ при температурном градиенте 1  .
.
|
| Рис. 5.14. Герконы – герметизированные магнитоуправляемые контакты |
К наружным концам пластин припаивают провода, служащие для присоединения к внешней цепи. Если геркон поместить в магнитное поле, созданное током в обмотке 2,окружающей геркон, то на контакты будет действовать электромагнитная сила F э. Если эта сила окажется больше противодействующего усилия упругих пластин, то произойдет замыкание контактов.
Электромагнитная сила притяжения контактов определяется аналогично силе притяжения, действующей в любом другом электромагнитном механизме:
F э=0,5(I w)2 bl 1m0/(l +d)2,
где I – ток в обмотке; w–число витков; l – длина обмотки; l 1 –перекрытие пластин; b – ширина пластин.
После отключения обмотки пластины под действием сил упругости возвращаются в исходное состояние, т. е. контакты размыкаются. Следовательно, удержать контакт в замкнутом состоянии можно только за счет потребления энергии от сети, что является одним из недостатков геркона. Герконы бывают вакуумные и газонаполненные, в которых стеклянная ампула заполнена азотом, водородом или инертным газом.
Для управления магнитоуправляемым контактом можно использовать не только магнитное поле катушки с током (рис. 5.14, а),но и магнитное поле постоянного магнита (рис. 5.14, б). В последнем случае срабатывание контактов осуществляется в зависимости от взаимного перемещения геркона и постоянного магнита 3. Изменение магнитного поля, воздействующего на контакты, может осуществляться и за счет изменения параметров магнитной цепи при перемещении ферромагнитного экрана 4 (рис. 5.14, в).
Большая часть управляющего магнитного потока во всех схемах герконов, изображенных на рис. 5.14, проходит по воздуху. Так как воздушные участки имеют значительное магнитное сопротивление, то чувствительность устройств на герконах сравнительно невелика. Она, например, ниже чувствительности якорных электромагнитных реле с одинаковыми коммутационными параметрами.
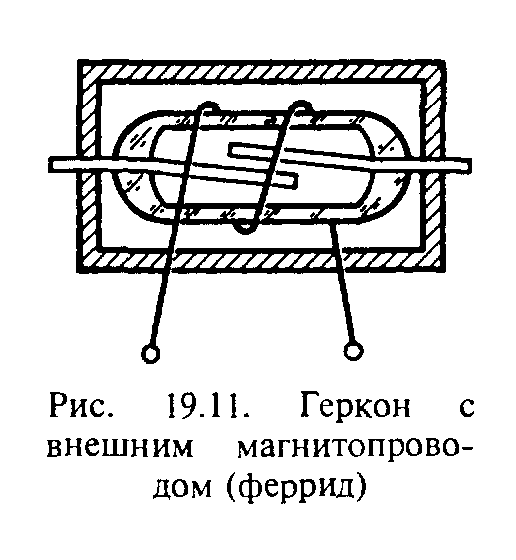
Для повышения чувствительности используют герконы с внешним магнитопроводом (рис. 5.15). Наличие внешнего магнитопровода увеличивает магнитную проводимость и, следовательно, индуктивность и инерционность всей системы. Постоянная времени при этом возрастает пропорционально индуктивности. Комбинированная конструкция, объединяющая магнитоуправляемые контакты и внешний магнитопровод, называется ферридом. Название «феррид» объясняется тем, что первоначально эти элементы имели магнитопровод из феррита. Затем появились конструкции и с металлическим магнитопроводом. Так как материал магнитопровода имеет остаточную намагниченность, то феррид после отключения запоминает воспринятую информацию.
|
| Рис. 5.15. Геркон с внешним магнитопроводом (феррид) |
Повысить чувствительность можно не только за счет внешнего магнитопровода, но и с помощью поляризующего постоянного магнита. В этом случае уже небольшой ток в обмотке приводит к срабатыванию контактов, если магнитные потоки обмотки и постоянного магнита направлены в одну сторону. С помощью поляризующего магнита можно получить устройства, работающие не на замыкание контактов, а на их размыкание. Магнитный поток постоянного магнита должен быть таким, чтобы контакты при отсутствии тока в обмотке управления были притянуты друг к другу. При подаче тока в обмотку управления создается магнитный поток обратного направления, и под действием сил упругости контакты размыкаются.
|
| Рис. 5.16. Преобразователь контактного сопротивления: 1 – электроды; 2 – электропроводящая резина; 3 – клей; 4 – изолятор из резины |
2. Преобразователи контактного сопротивления (рис. 5.16) основаны на изменении под действием давления сопротивления между проводящими элементами, разделенными слоями полупроводящего материала. Преобразователь выполняют в виде столбика из ряда слоев электропроводящей бумаги, электропроводящей резины (металлических пластин с напыленным высокоомным резистивным слоем) 2. Преобразователи контактного сопротивления имеют большие погрешности гистерезиса и линейности до 10%, но просты конструктивно и имеют достаточно высокую выходную мощность и надежность. Подобные датчики используются в тактильных датчиках роботов и манипуляторов, а также в диэлектрических протезах.
3. Реостатные преобразователи. Реостатный преобразователь–это прецизионный реостат, движок которого перемещается под действием измеряемой величины, примеры реализации которого – измерение углового и линейного перемещения. Естественной входной величиной преобразователя является перемещение движка, а выходной – сопротивление.
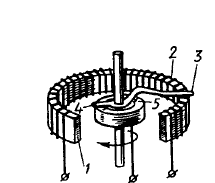
На рис. 5.17 приведена конструкция потенциометрического датчика для измерения угловых перемещений. Так же как и датчик линейных перемещений, он состоит из каркаса 1 с обмоткой 2,по которой скользит движок 3. Для съема сигнала с перемещающегося движка служит добавочная щетка 4,скользящая по токосъемному кольцу 5.Выходное напряжение датчика угловых перемещений пропорционально углу поворота подвижной части первичного измерителя, соединенного с осью движка.
|
| Рис. 5.17. Конструкция реостатных потенциометрических первичных преобразователей угловых перемещений |
Обмотка для повышения точности и надежности делается из провода, изготовленного из манганина, константана, фехраля, платино-иридиевого сплава (5 – 30%). Для обмотки преобразователя используется изолированный эмалью или оксидной пленкой провод. После изготовления обмотки изоляция провода счищается в местах соприкосновения его со щеткой. Щетка преобразователя выполняется либо из проволок, либо из плоских пружинящих полосок чистого металла (платина, серебро) или сплавов (платина с иридием, фосфористая бронза, медно-серебряные сплавы и т. д.). Для обеспечения хорошего контакта движок прижимается к обмотке силой 10-3–10-4 Н. Сила создается благодаря упругости движка. При измерении переменных величин, при переходе движка с одного витка на другой, он "подскакивает", возникает пульсирующая сила, которая может нарушить контакт, поэтому сила прижатия должна быть увеличена. Большая сила нежелательна, поскольку при ее увеличении возрастает сила трения, препятствующая перемещению движка и увеличивающая износ обмотки и контактирующей поверхности движка.
Форма каркаса зависит от характера измеряемого перемещения (линейное, угловое) и может иметь вид цилиндра, тора, призмы и т. д. Для изготовления каркасов применяются диэлектрики (гетинакс, пластмасса, керамика) и металлы (дюралюминий с анодированной поверхностью). Габариты преобразователя определяются значением измеряемого перемещения, сопротивлением обмотки и мощностью, выделяемой в обмотке. Микропровод позволяет выполнить миниатюрные преобразователи, имеющие габариты 5´5 мм.
Кроме потенциометрической реализации реостатных первичных преобразователей существует и их реохордная реализация, приведенная на рис. 5.18.
|
| Рис. 5.18. Реостатный первичный преобразователь реохордного типа |
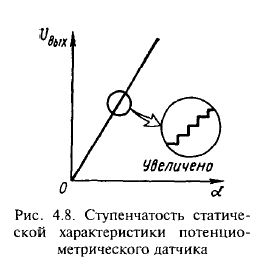
Важной характеристикой качества потенциометрического датчика является плавность изменения выходного напряжения. Реостатные преобразователи аналогично контактным являются ступенчатыми (дискретными), поскольку непрерывным изменениям входной величины соответствуют ступенчатые изменения сопротивления. При перемещении движка по обмотке потенциометра происходит скачкообразное изменение сопротивления D R, поскольку движок перескакивает с одного витка на другой. Это приводит к тому, что зависимость выходного напряжения от перемещения имеет ступенчатый вид (рис. 5.19).
|
| Рис. 5.19. Ступенчатость статистической характеристики потенциометрического датчика |
Число ступеней пропорционально, а их высота обратно пропорциональна числу витков обмотки. Реальная выходная характеристика имеет отклонения от идеальной (бесступенчатой) как вверх, так и вниз, т.е. погрешность, вызванная ступенчатостью, может быть как положительной, так и отрицательной и составляет половину напряжения U B, приходящегося на один виток намотки. Если обозначить через w общее число витков потенциометра, то U В= U/w и погрешность ступенчатости D≤ U/ (2 w).
Для оценки погрешности, обусловленной ступенчатостью, вводят понятие электрической разрешающей способности потенциометра dр, которая определяет максимально возможную точность работы потенциометрического датчика. Улучшить ее можно, увеличивая число витков w, путем удлинения намотанной части потенциометра l (при заданном диаметре провода), либо уменьшения сечения провода.

|
| Рис.5.20. Реостатные преобразователи для угловых (а), линейных (б) перемещений и для функционального преобразования линейных перемещений (в) |
Если номинальную функцию преобразования принять проходящей посредине "ступенек", то преобразователь имеет пропорциональную функцию преобразования с одинаковыми "скачками" сопротивления по всему диапазону перемещения движка и при полном сопротивлении преобразователя
Rp= w D R,
а максимальное значение приведенной погрешности, обусловленно дискретностью
g R =±  =±
=±  ,
,
где w – число витков в обмотке.
Для устранения этой погрешности применяют реохордные преобразователи, в которых щетка скользит вдоль оси проволоки.
В измерительной технике требуются функциональные реостатные преобразователи как с линейной, так и с нелинейной функцией преобразования. Способом построения преобразователей с нелинейной функцией преобразования R=f (x) является использование каркаса с переменной высотой (рис. 5.20, а, б). При перемещении движка на величину шага обмотки D х= l, сопротивление изменяется на
D R =(dR / dх)l, (5.1)
где dR / dх –производная требуемой функции преобразования R = f (x) по перемещению движка х. При перемещении движка с одного витка на другой сопротивление изменяется на величину
D R =r1 l пр=2r1(b + h), (5.2)
где r1 – сопротивление единицы длины провода; l пр – длина одного витка провода; h – высота каркаса; b – его толщина. Из (5.1) и (5.2) можно определить зависимость высоты каркаса h от заданной функции преобразования
h =(l/2r1)(dR / dх)– b.
Если требуется линейная функция преобразования, то dR / dx =const, и высота каркаса должна быть постоянной.
Таким образом, выбирая форму каркаса можно получить определенную функциональную зависимость между перемещением и выходным сопротивлением реостатного преобразователя, поскольку периметр каркаса P и входное перемещение x связаны между собой зависимостью. По данному выражению из заданной зависимости R =j(x) определяют зависимость  . Изготовление каркаса с непрерывно изменяющейся высотой более сложно, чем изготовление каркаса с постоянной высотой. Для упрощения технологии прибегают к кусочно-линейной аппроксимации заданной нелинейной функции преобразования. Для каждого интервала перемещения движка х, на котором аппроксимирующая функция линейна, высота каркаса постоянна. Каркас преобразователя получается ступенчатым.Число ступеней равно числу интервалов кусочно-линейной аппроксимации.
. Изготовление каркаса с непрерывно изменяющейся высотой более сложно, чем изготовление каркаса с постоянной высотой. Для упрощения технологии прибегают к кусочно-линейной аппроксимации заданной нелинейной функции преобразования. Для каждого интервала перемещения движка х, на котором аппроксимирующая функция линейна, высота каркаса постоянна. Каркас преобразователя получается ступенчатым.Число ступеней равно числу интервалов кусочно-линейной аппроксимации.
Измерительные цепи. Измерительные цепи, в которых включаются реостатные преобразователи, питаются преимущественно постоянным напряжением, но могут питаться и переменным напряжением. Напряжение питания преобразователя определяется его допустимой мощностью и сопротивлением. Наиболее распространенным является включение преобразователя в измерительный мост.
Номинальное изменение сопротивления реостатного преобразователя достигает 90%, поэтому необходимо учитывать нелинейность, вносимую измерительной схемой, и, исходя из допустимой погрешности линейности, выбирать сопротивление измерительного прибора.
Потенциометрическая схема включения реостатного преобразователя. Преобразователь может включаться в электрическую цепь по потенциометрической схеме. Напряжение с его движка подается на нагрузку R н. Рассмотрим зависимость напряжения на нагрузке от изменения сопротивления R преобразователя. Если сопротивление R н столь велико (R н>> R p), что током в этом сопротивлении можно пренебречь по сравнению с током в сопротивлении R р, то реостатный преобразователь работает в режиме холостого хода и напряжение на нагрузке
U н= UR / R р
пропорционально сопротивлению R. Если реостатный преобразователь имеет пропорциональную функцию преобразования R= (Rp/l) x, то напряжение U н пропорционально перемещению движка
U к=(U/l) x.
Для анализа цепи, в которой сопротивление нагрузки R н соизмеримо с номинальным сопротивлением преобразователя R p, используем теорему об активном двухполюснике. Для определения тока в некотором сопротивлении R н исследуемую цепь можно представить в качестве активного двухполюсника, имеющего внутреннее сопротивление Ri и напряжение холостого хода Ux. К зажимам двухполюсника подключено сопротивление R н. Напряжение на нагрузке:
U н= UxR н/(Ri + R н).
При этом напряжение на нагрузке:
U н= UR [ Rp (1+ Ri/R н)]. (5.3)
Из рис. 5.20, aследует
Ri = R (Rp – R)/[ R +(Rp – R)]= R (Rp – R)/ Rp.
Подставив уравнение (5.4) в (5.3), получим
U н= UR [ Rp (1+ R (Rp – r)/ RpR н)]= U b/[1+ab(1–b)],
где b= R / Rp – относительное изменение сопротивления преобразователя; a =Rp/R н– коэффициент нагрузки.
Если a столь мало, что ab<<1 (режим холостого хода), то U н изменяется пропорционально b. При увеличении a зависимость становится нелинейной, причем нелинейность возрастает с увеличением a. При этом абсолютная погрешность нелинейности имеет вид
D U = U н– Ux.
Для уменьшения погрешности следует уменьшать a, т.е. увеличивать R н. Однако практически значения сопротивления нагрузки часто невелики. В этом случае для уменьшения погрешности можно более рационально выбрать номинальную функцию преобразования.
Погрешность реостатного преобразователя. При измерении с изменением температуры изменяется сопротивление преобразователя, поскольку изменяется удельное сопротивление провода. Сопротивление преобразователя определяется известной формулой
y = S 1D x, x ос= S 1 y.
Погрешность (изменение напряжения на нагрузке) можно рассчитать, исходя из схемы включения, номинальных значений входящих в нее сопротивлений и их температурных коэффициентов. При включении преобразователя по потенциометрической схеме в режиме холостого хода изменение температуры не меняет распределение напряжений и температурная погрешность отсутствует.
К достоинствам преобразователей относится возможность получения высокой точности, значительных по уровню выходных сигналов и относительная простота конструкции. Недостатки – наличие скользящего контакта, необходимость относительно больших перемещений движка, а иногда и значительного усилия для его перемещения, что и определяет применение реостатных преобразователей для преобразования сравнительно больших перемещений (угловых, линейных). Трение в реостатном преобразователе вызывает случайные гистерезисные изменения силы и момента, необходимые для перемещения движка по обмотке, и приводит к его погрешности.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 6631; Нарушение авторских прав?; Мы поможем в написании вашей работы!