КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Матрица поворота вокруг произвольной оси
|
|
|
|
Лекция 3
В ряде случаев подвижная система координат OUVW может совершать поворот на угол j относительно произвольной оси r, представляющей собой единичный вектор с компонентами rx, ry и rz, выходящие из начала координат О. Это применяется тогда, когда нужно упростить последовательность поворотов относительно основных осей систем координат OXYZ и/или OUVW. Их можно заменить одним поворотом системы OUVW вокруг оси r (рис. 3.1).
Чтобы получить матрицу поворота R r,j, можно сначала произвести ряд поворотов относительно осей системы OXYZ, чтобы совместить ось r с осью OZ. Затем произвести требуемый поворот вокруг оси r на угол j и опять ряд поворотов относительно системы OXYZ, возвращающих ось OZ в исходное положение.
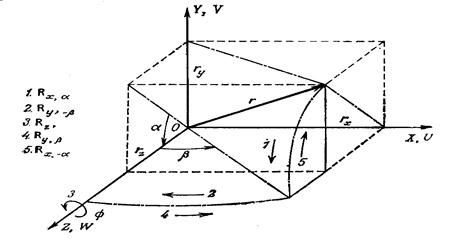
Рисунок 3.1. Вращение вокруг произвольной оси
Из рис. 3.1 видно, что совмещение осей OZ и r может быть реализовано с помощью поворота на угол a относительно оси OX, тогда ось r в результате окажется в плоскости XZ, а затем на угол -b, вокруг оси OY, тогда в результате оси OZ и r совпадут. После поворота на угол j относительно OZ или r проведём прежнюю операцию в обратном порядке с обратными знаками. Результирующая матрица поворота равна:
R r,j = R x,-a × R y,b × R z,j × R y,-b ×R x,a =

Из этого легко определить, что:
sina =  ; cosa =
; cosa =  ; sinb = rx; cosb =
; sinb = rx; cosb =  .
.
Подстановка этих равенств в предыдущее выражение дает:
 , (3-1)
, (3-1)
где Vj = vers j= 1– cosj.
Это очень полезная матрица поворота.
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 1027; Нарушение авторских прав?; Мы поможем в написании вашей работы!