КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Представление матриц поворота через углы Эйлера
|
|
|
|
Матричное описание вращения твёрдого тела упрощает многие операции; однако, для того, чтобы полностью описать ориентацию вращающегося твёрдого тела, необходимо использовать все девять элементов матрицы поворота. Непосредственно эти элементы не составляют полной системы обобщённых координат, с помощью которых можно описать ориентацию вращающегося твёрдого тела относительно абсолютной системы координат.
В качестве обобщённых координат можно использовать углы Эйлера j, q и y.
Таблица 3.1. Три системы углов Эйлера
| Последова-тельность поворотов | На j вокруг оси OZ | На j вокруг оси OZ | На y вокруг оси OX |
| На q вокруг оси OU | На q вокруг оси OV | На q вокруг оси OY | |
| На y вокруг оси OW | На y вокруг оси OW | На j вокруг оси OZ |
Первая из систем углов Эйлера обычно используется при описании движения гироскопов и соответствует следующей последовательности поворотов (рис. 3.2):
1. Поворот на угол j вокруг оси OZ (R z,  ).
).
2. Поворот на угол q вокруг повёрнутой оси OU (R u,q).
3. Поворот на угол y вокруг повёрнутой оси OW (R w,y).
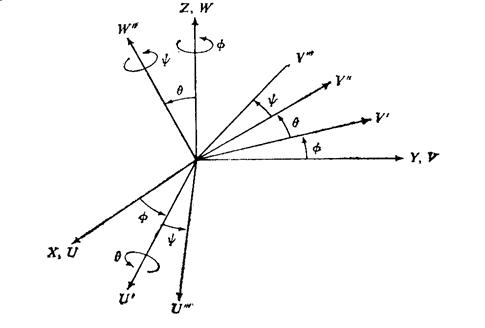
Рисунок 3.2. Первая система углов Эйлера
Результирующая матрица поворота имеет следующий вид:
R j,q,y = R z,j × R u,q × R w,y =  =
=
=  . (3-2)
. (3-2)
Поворот, описываемый матрицей R j,q,y,может быть также получен в результате выполнения последовательности следующих поворотов вокруг осей неподвижной системы координат: сначала на угол y вокруг оси OZ, затем на угол q вокруг оси OX, затем на угол j вокруг оси OZ.
На рисунке 3.3 показана вторая система углов Эйлера, определяемая следующей последовательностью поворотов:
1. Поворот на угол j вокруг оси OZ (R z,j).
2. Поворот на угол q вокруг оси OV (R v,q).
3. Поворот на угол y вокруг повёрнутой оси OW (R w,y).
Результирующая матрица поворота имеет следующий вид:
R j,q,y = R z,j × R v,q × R w,y =  =
=
=  . (3-3)
. (3-3)
Поворот, описываемый матрицей R j,q,yдля этой системы углов Эйлера, может быть получен также в результате выполнения последовательных поворотов: на угол y вокруг оси OZ, на угол q вокруг оси OY, на угол j вокруг оси OZ.
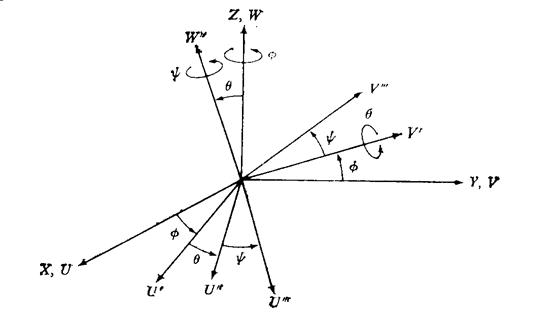
Рисунок 3.3. Вторая система углов Эйлера
Ещё одну систему углов Эйлера составляют так называемые углы крена, тангажа и рыскания. Эти углы обычно применяются в авиации для описания движения самолётов.
Они соответствуют следующей последовательности поворотов:
1. Поворот на угол y вокруг оси OX (R x,y) – рыскание.
2. Поворот на угол q вокруг оси OY (R y,q) – тангаж.
3. Поворот на угол j вокруг оси OZ (R z,j) – крен.
Результирующая матрица поворота имеет вид:
R j,q,y = R z,j × R y,q × R x,y=  =
=
=  . (3-4)
. (3-4)
Поворот, описываемый матрицей R j,q,yв переменных «крен, тангаж, рыскание» может быть также получен в результате выполнения следующей последовательности поворотов вокруг осей абсолютной и подвижной систем координат: на угол j вокруг оси OZ, затем на угол q вокруг повёрнутой оси OV, на угол y вокруг повёрнутой оси OU (продольная ось аппарата – Z) (рис. 3.4).
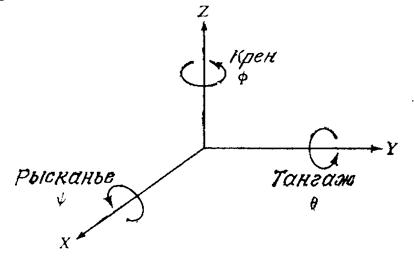
Рисунок 3.4. Крен, тангаж, рысканье (третья система углов Эйлера)
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 1063; Нарушение авторских прав?; Мы поможем в написании вашей работы!