КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Синхронные двигатели
|
|
|
|
Синхронные двигатели относятся к двигателям переменного тока. Различают:
– синхронные двигатели с электромагнитным возбуждением (СД), питающиеся от трехфазной сети переменного тока;
– синхронные двигатели с постоянными магнитами (СДПМ), питающиеся от трех- или однофазной сети переменного тока.
Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитного поля полюсов индуктора. В синхронном двигателе частота вращения ротора равна частоте вращения магнитного поля, создаваемого током статора. Обычно якорь расположен на статоре, а индуктор – на роторе. В мощных двигателях в качестве полюсов используются электромагниты (ток на ротор подаётся через скользящий контакт щетка – кольцо), в маломощных – постоянные магниты. Существует обращённая конструкция двигателей, в которой якорь расположен на роторе, а индуктор — на статоре (в устаревших двигателях, а также в современных криогенных синхронных машинах, в которых в обмотках возбуждения используются сверхпроводники).
Индукторы синхронных машин имеют две различные конструкции: явнополюсную или неявнополюсную. Явнополюсная машина отличается тем, что полюса ярко выражены и имеют конструкцию, схожую с полюсами машины постоянного тока. При неявнополюсной конструкции обмотка возбуждения укладывается в пазы сердечника индуктора, весьма похоже на обмотку роторов асинхронных машин с фазным ротором, с той лишь разницей, что между полюсами оставляется место, не заполненное проводниками (так называемый большой зуб).
Двигатель требует разгона до частоты, близкой к частоте вращения магнитного поля в зазоре, прежде чем сможет работать в синхронном режиме. При такой скорости вращающееся магнитное поле якоря сцепляется с магнитными полями полюсов индуктора.
СДПМ прост по конструкции, не имеет потерь на возбуждение и обладает высокой стабильностью скорости ротора. Эти качества выделяют его из ряда всех остальных машин и обеспечивают ему применение в системах автоматики, приводах подачи станков, прецизионных системах слежения, а также системах, где стабильность скорости является первостепенным требованием, предъявляемым к технологическому процессу.
Постоянное удешевление магнитных материалов, в частности, внедрение сплавов редкоземельных металлов, совершенствование аппаратной базы управления делают возможным использование этого типа двигателей в тех областях, где традиционно применялись двигатели постоянного тока (ДПТ) или асинхронные двигатели (АД).
Большинство синхронных электродвигателей малой мощности (СДПМ) отличается от машин нормального исполнения только конструкцией ротора, который, как правило, не имеет обмотки возбуждения, контактных колец и прижимающихся к ним щеток. Для возникновения вращающего момента ротор выполняют из магнитно-твердого сплава с последующим однократным намагничиванием его в сильном импульсном магнитном поле, в результате чего в дальнейшем полюсы сохраняют остаточную намагниченность. При этом ротор содержит короткозамкнутую пусковую обмотку.
В момент пуска СДПМ работает как асинхронный и его начальный вращающий момент создается за счет взаимодействия вращающегося магнитного поля статора с наведенными им токами в короткозамкнутой обмотке ротора. Поскольку двигатель пускается в ход в возбужденном состоянии, то магнитное поле постоянных магнитов вращающегося ротора наводит в обмотке статора э.д.с. переменной частоты, а это вызывает токи, из-за которых возникает тормозной момент.
Результирующий момент на валу двигателя определяется суммой моментов, обусловленных короткозамкнутой обмоткой и тормозным эффектом, т.е. который зависит от скольжения. В процессе разгона ротора этот момент достигает минимального значения, которое при правильном выборе пусковой обмотки должно быть больше номинального момента. Когда скорость приблизится к синхронной, ротор, в результате взаимодействия поля постоянных магнитов с вращающимся магнитным полем статора втягивается в синхронизм и далее вращается с синхронной скоростью. Схема и механические характеристики пуска однофазного СДПМ приведены на рис. 4.12.
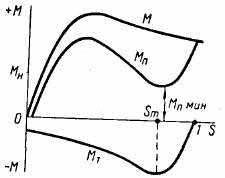
Рис. 4.12. Схема и механические характеристики пуска однофазного СДПМ
Рабочие характеристики синхронного двигателя с постоянными магнитами мало отличаются от аналогичных характеристик синхронного двигателя с обмоткой возбуждения ротора. Недостатком СДПМ является сравнительно низкий коэффициент мощности и сложность изготовления ротора.
Модификациями маломощных СДПМ, применяемых в СУИМ, являются синхронные реактивные и синхронные гистерезисные двигатели. Первые нашли крайне малое применение в силу низкого коэффициента мощности (не более 0,5) и низкого КПД (не более 0,7). Различие между синхронными двигателями с постоянными магнитами и синхронными гистерезисными двигателями состоит в том, что у первых ротор при изготовлении машин подвергается предварительному намагничиванию в сильном импульсном магнитном поле, а у вторых он намагничивается вращающимся магнитным полем статора. Синхронные гистерезисные двигатели отличаются большим начальным пусковым моментом, плавностью входа в синхронизм, незначительным изменением тока в пределах 20 - 30 % при переходе от холостого хода к режиму короткого замыкания.
Ниже приведены некоторые технические характеристики двух СДПМ из достаточно широкой линейки двигателей, выпускаемых корпорацией Siemens.
Тип - 1FU8073-4TA2:
Габарит – 71.
Число полюсов – 4.
Класс нагрева – F.
Класс защиты - IP 55.
Число фаз статора – 3.
Напряжение и частота питания – 100 В, 50 Гц.
Ток статора – 2,7 А.
Вращающий момент – 2 Нм.
Мощность 0, 31 кВт.
Тип - 1FU8167-6TD8:
Габарит – 160.
Число полюсов – 6.
Класс нагрева – F.
Класс защиты – IP 55.
Число фаз статора – 3.
Напряжение и частота питания – 400 В, 50 Гц.
Ток статора – 13,5 А.
Вращающий момент – 59,6 Нм.
Мощность 6, 24 кВт.
СД большой мощности с электромагнитным возбуждением работают с постоянной скоростью вращения в продолжительном по нагреву режиме работы. В СУИМ нашли крайне малое применение.
СДПМ малой и средней мощности, напротив, нашли широкое применение в качестве приводов ЭИМ. При этом маломощные одно- и трехфазные СДПМ могут работать как в режиме постоянной, так и переменной скорости. Трехфазные СДПМ средней мощности функционируют, как правило, в режиме переменной скорости.
Для реализации пуско-тормозных режимов СУИМ постоянной скорости применяют реверсивные бесконтактные пускатели. Математическиe модели СДПМ в этом случае представляют в виде
 , (4.22)
, (4.22)
или  , (4.23)
, (4.23)
где  – номинальная частота напряжения питания обмотки статора;
– номинальная частота напряжения питания обмотки статора;
 ,
,  – текущее и номинальное значения скорости вращения двигателя;
– текущее и номинальное значения скорости вращения двигателя;
 – коэффициент передачи СДПМ;
– коэффициент передачи СДПМ;
 – постоянная времени двигателя, определяемая по кривой разгона.
– постоянная времени двигателя, определяемая по кривой разгона.
Для регулирования скорости вращения СДПМ в СУИМ переменной скорости применяют реверсивные частотные преобразователи. В этом случае модель двигателя представляют передаточной функцией вида
 , (4.24)
, (4.24)
где  – регулируемая частота питания обмотки статора.
– регулируемая частота питания обмотки статора.
4.2.5. Шаговые двигатели
Шаговые двигатели (ШД) – это электромеханические устройства, преобразующие сигнал управления в угловое или линейное перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. Современные шаговые двигатели являются, по сути, синхронными двигателями без пусковой обмотки на роторе, что объясняется не асинхронным а частотным пуском шагового двигателя. Роторы могут быть возбужденными (активными) и невозбужденными (пассивными).
В СУИМ применяются реверсивные ШД. Для осуществления реверса зубцы статора и ротора шагового двигателя должны быть симметричными (без клювообразных выступов, свойственных нереверсивным ШД).
Рассмотрим работу двухфазного двухполюсного шагового двигателя с активным ротором в виде постоянного магнита. Будем считать, что намагничивающие силы фаз (НС) распределены по синусоидальному закону. При включении фазы под постоянное напряжение (условно положительной полярности) вектор НС статора совпадет с осью фазы А. В результате взаимодействия намагничивающей силы (НС) статора с полем постоянного магнита ротора возникнет синхронизирующий момент М с = M maxsin q, где q - угол между осью ротора и вектором НС.
Рисунок 4.13. Реверсивный шаговый двигатель (1-4 такты работы)
При отсутствии тормозного момента ротор займет положение, при котором его ось совпадет с осью фазы А (см. рис. 4.13, первый такт). Если теперь отключить фазу А и включить фазу В, вектор НС и ротор повернутся на 90° (второй такт на рис. 2). При включении фазы А на напряжение обратной полярности (третий такт на рис. 4.13) НС и ротор повернутся еще на 90° и т.д. Если к ротору ШД приложен момент нагрузки, то при переключении фаз ротор будет отставать от вектора НС на некоторый угол q н = arcsin(M н/ M max).
В зависимости от типа электронного коммутатора управление шаговым двигателем может быть однополярным или разнополярным, симметричным или несимметричным, потенциальным или импульсным [11,12].
Характер движения ротора шагового двигателя определяется частотой и характером изменения управляющих импульсов. Реверс шагового двигателя производится путем изменения последовательности коммутации токов в обмотках, приводящего к изменению направления вращения магнитного поля на обратное направление.
Применительно к СУИМ ШД может в большинстве случаев рассматриваться как безынерционное или апериодическое звено, аналогичное (4.23) с постоянной времени, не превышающей нескольких миллисекунд.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 5266; Нарушение авторских прав?; Мы поможем в написании вашей работы!