КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Краткая характеристика процессов при самозапуске двигателей
|
|
|
|
В процессе самозапуска происходят изменения токов, напряжения и частоты вращения двигателей [2]. На рис. 3.1 показаны диаграммы изменения напряжения, тока, частоты вращения двигателей при их переводе на резервноепитание. После отключения рабочего источника питания в момент времени  , напряжение на выводах двигателей становится равным нулю, и начинается торможение. В момент времени
, напряжение на выводах двигателей становится равным нулю, и начинается торможение. В момент времени  включается резервный источник питания. На выводах двигателей вновь появляется напряжение, и они начинают разгоняться. Таким образом, весь процесс самозапуска можно разделить на четыре этапа [1].
включается резервный источник питания. На выводах двигателей вновь появляется напряжение, и они начинают разгоняться. Таким образом, весь процесс самозапуска можно разделить на четыре этапа [1].
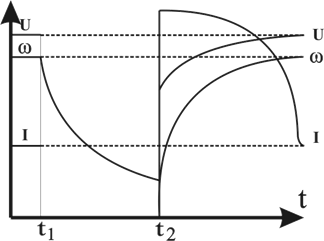
Рисунок 3.1 – Диаграмма токов, напряжения и частоты вращения двигателя при действии АВР
Первый этап – выбег агрегатов, который зависит от причины нарушения электроснабжения и может быть индивидуальным, когда выбегающие двигатели не оказывают заметного влияния друг на друга, и групповым, когда взаимное влияние двигателей значительно.
Индивидуальный выбег происходит при отключении одиночного двигателя. Кроме того, можно считать индивидуальным выбег группы двигателей при отключении питания, если они однотипны и одинаково загружены; при КЗ. на смежных элементах сети, a также в случае, если электрическая цепь между рассматриваемым и другими двигателями содержит реактор или трансформатор. Во всех этих случаях отсутствует или является незначительным обмен электромагнитной мощностью между двигателями, т.е. последние не оказывают существенного влияния друг на друга.
Величина остаточной частоты вращения в любой момент времени после отключения питания определяется моментом инерции агрегата и коэффициентом загрузки двигателя (kЗ - это момент сопротивления механизма при номинальной частоте вращения, выраженный в долях номинального момента двигателя), а также видом механической характеристики приводимого механизма.
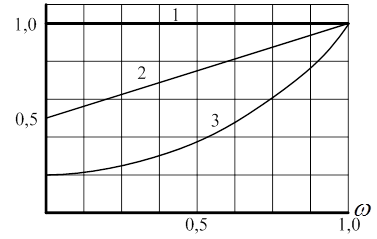
Рисунок 3.2 – Зависимость момента сопротивления механизма от частоты вращения (kЗ=1,0), 1 - 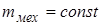 , 2 -
, 2 -  , 3 -
, 3 - 
На рис. 3.2 показаны кривые моментов сопротивления для различных типов механизмов. Если перерыв питания вызван не отключением, а наличием близкого короткого замыкания, выбег происходит по более крутой характеристике, так как двигатель переходит в генераторный режим и посылает к месту КЗ ток, равный примерно своему пусковому току и создающий дополнительный тормозной момент на валу. Причем степень влияния генераторного момента mk на торможение у асинхронного и синхронного двигателя будет различной.
В асинхронном двигателе ток подпитки КЗ, создающий дополнительный тормозной момент затухает менее чем через 0,3 с. Дополнительное торможение за это время по сравнению с индивидуальным выбегом при той же загрузке оставляет (0,8-3)% в зависимости от вида характеристики механизма и в дальнейшем не будет учитываться.
На диаграмме, рис. 3.1 для простоты показано, что в момент отключения питания напряжение на выводах двигателей исчезло мгновенно. На самом деле уотключенных, но вращающихся двигателей имеется остаточная эдс.
При внезапном отключении от сети напряжение на выводах статора асинхронного двигателя снижается от номинального значения до величины переходной эдс (0,86-0,95 от номинального напряжения). В дальнейшем эдс, развиваемая индивидуально выбегающим двигателем затухает значительно быстрее, чем происходит снижение частоты вращения. Сказанное иллюстрируется рис. 3.3 на котором приведена осциллограмма эдс асинхронного двигателя.
Рисунок 3.3 – Выбег асинхронного двигателя
Групповой выбег происходит при одновременном отключении группы разнотипных или неодинаково загруженных двигателей, питающихся от одной секции шин источника питания промышленного предприятия. В этом случае происходит обмен электромагнитной мощностью между двигателями, в результате чего характеристики группового выбега отличаются от характеристик выбега индивидуального.
Групповой, выбег синхронных и асинхронных двигателей на значительном интервале времени является синхронным (до тех пор, пока напряжение на выводах не снизится до величины 0,25-0,4  ). Если в выбеге одновременно участвуют синхронные и асинхронные двигатели, то возникает генераторный момент от токов возбуждения. Однако величина этого момента значительно меньше, чем при КЗ.
). Если в выбеге одновременно участвуют синхронные и асинхронные двигатели, то возникает генераторный момент от токов возбуждения. Однако величина этого момента значительно меньше, чем при КЗ.
За счет взаимного обмена электромагнитной мощностью двигатели с меньшими моментами инерции выбегают в двигательном режиме, т.е.медленнее, чем при индивидуальном выбеге; а двигатели с большими моментами инерции выбегают в генераторном режиме, т.е. быстрее. Скорости выбега разнородных двигателей выравниваются, что и обуславливает их синхронный выбег.
Характер изменения частота вращения при групповом выбеге асинхронного и синхронного двигателей показан на рис. 3.4.
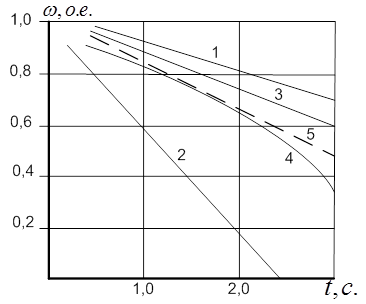
Рисунок 3.4 – Изменение частоты вращения синхронного и асинхронного двигателей при выбеге ( ,
,  ).
).
1,2 – при индивидуальном выбеге; 3,4 – при групповом выбеге; 5 – синхронная частота эквивалентного двигателя при групповом выбеге
Второй этап – оценка возможности самозапуска, которая сводится к сравнению развиваемого двигателем электромагнитного момента ( ) с механическим моментом сопротивления (
) с механическим моментом сопротивления ( ) при восстановлении электроснабжения. При этом электромагнитный момент должен превышать механический момент сопротивления [3]:
) при восстановлении электроснабжения. При этом электромагнитный момент должен превышать механический момент сопротивления [3]:
 . (3.1)
. (3.1)
Одновременно на этом этапе расчета необходимо обеспечить допустимое снижение напряжения на шинах нагрузки, обычно  .
.
Третий этап – разгон и восстановление рабочего режима.
После восстановления питания начинается разгон двигателя. На этом этапе самозапуск отличается от пуска наличием следующих особенностей [3]:
1. В самозапуске участвует группа электродвигателей, что увеличивает токи в питающих элементах, приводит к снижению напряжения на зажимах двигателей и уменьшению их вращающего электромагнитного момента;
2. В момент восстановления питания двигателей часть двигателей или все двигатели вращаются с остаточной скоростью. Так как в момент появления напряжения двигатель имеет остаточную эдс происходит его несинхронное включение. Максимальное значение периодической составляющей тока включения будет иметь место, если напряжение питающей сети и эдс двигателя находятся в противофазе. В некоторых случаях токи самозапуска могут превышать значения пусковых токов. Это возможно, например, при быстром АПВ или АВР, когда эдс двигателей, временно отключенных от питающей системы не успеют значительно снизиться. При этом токи самозапуска мощных асинхронных двигателей иногда на несколько десятков процентов, а синхронных более чем в два раза, превышают пусковые. Возникающие при этом динамические усилия могут вызывать недопустимую деформацию обмоток, а моменты вращения, передающиеся по валу двигателя, в ряде случаев представляют опасность для целостности последнего.
Постоянные времени, определяющие скорость затухания электромагнитных переходных процессов, в асинхронных электродвигателях обычно малы: свободный ток затухает уже через 0,04-0,06 с. Поэтому электромагнитные процессы, как правило, не оказывают заметного влияния на протекание электромеханического процесса самозапуска, и ими обычно пренебрегают.
3. Самозапуск происходит, как правило, при нагруженных механизмах, что приводит к увеличению времени разгона и повышению температуры обмоток.
По мере разгона (смотри рис. 3.1) ток двигателя снижается, а напряжение на его выводах повышается. Такой характер зависимости обусловлен тем, что сопротивление двигателя изменяется в зависимости от частоты вращения.
При расчетах самозапуска без учета электромагнитных переходных процессов можно воспользоваться упрощенной формулой для определения зависимости индуктивного сопротивления асинхронного двигателя от скольжения:
 . (3.2)
. (3.2)
При упрощенном расчете следует принимать  равное сверхпереходному сопротивлению при известной кратности пускового тока двигателя
равное сверхпереходному сопротивлению при известной кратности пускового тока двигателя  . Напряжение в этом случае остается неизменным и равным напряжению в начальный момент самозапуска.
. Напряжение в этом случае остается неизменным и равным напряжению в начальный момент самозапуска.
На рис. 3.5 приведена зависимость сопротивления от скольжения для асинхронного двигателя.
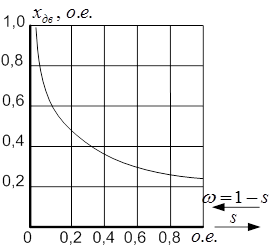
Рисунок 3.5 – Изменение сопротивления двигателя от скольжения.
Анализ возможности самозапуска и расчет разгона двигателей при самозапуске проводят с помощью характеристик электромагнитного момента, соответствующих установившимся режимам. Подобные характеристики, как известно, называются статическими [4].
Характеристика электромагнитного асинхронного момента двигателя от скольжения при изменяющемся напряжении на выводах может быть при ряде приближений построена при помощи формулы [2]:
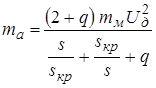 . (3.3)
. (3.3)
Характеристика электромагнитного асинхронного момента двигателя от скольжения при постоянном напряжении на выводах:
 , (3.4)
, (3.4)
где  - критическое скольжение двигателя, соответствующее максимальному асинхронному моменту:
- критическое скольжение двигателя, соответствующее максимальному асинхронному моменту:
 ; (3.5)
; (3.5)
 . (3.6)
. (3.6)
На рабочем участке характеристики асинхронного электромагнитного момента
возможно применение формулы Клосса:
 , (3.7)
, (3.7)
где  .
.
При расчетах пуска и самозапуска двигателей следует использовать формулу (3.3). Более точно зависимость асинхронного момента от скольжения может быть определена экспериментально. Электромагнитный момент асинхронного двигателя представляет собой вращающий асинхронный момент, обусловленный взаимодействием наведенных токов ротора с полем статора. Характер асинхронного момента представлен на графической зависимости рис. 3.6.
Из выражения (3.3) видно, что если напряжение на выводах двигателя отличается от номинального, то величина асинхронного момента изменяется пропорционально квадрату напряжения.
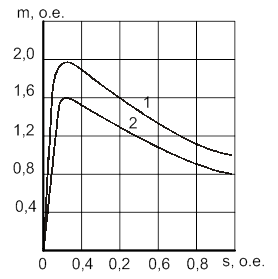
Рисунок 3.6 – Вращающий момент асинхронного двигателя при различном напряжении на его выходах. 1 – при  ; 2 – при
; 2 – при 
При выполнении условия (3.1) самозапуск считается обеспеченным.
Четвертый этап - расчет нагрева электродвигателей, который производится совместно с третьим этапом и сводится к вычислению теплового импульса без учета передачи тепла в окружающую среду. Упрощенное решение этой задачи дано в разделе 6.
При реализации всех этапов расчета в дальнейшем возможно использовать два основных подхода. Первый основан на расчетах без учета электромагнитных переходных процессов. В этом случае предполагается, что электромагнитные моменты изменяются мгновенно, а анализ выбега на короткое замыкание и разгона двигателей производится с помощью характеристик электромагнитного момента, соответствующих установившимся режимам, то есть статическим характеристикам. Второй подход связан с учетом как механических, так и электромагнитных процессов [5]. Уравнения электромагнитных процессов являются упрощенной системой уравнений, построенной на основе уравнений Парка-Горева [6]. Реализация такого подхода значительно сложнее, чем первого и в данной работе не рассматривается.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1627; Нарушение авторских прав?; Мы поможем в написании вашей работы!