КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Динамические звенья
|
|
|
|
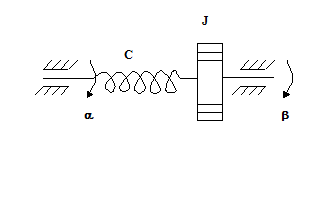
Для теоретического исследования работы приборов и систем необходима оценка каждого их элемента не по устройству и назначению, а в зависимости от вида описывающего его дифференциального уравнения. В этом смысле нет никакого отличия между механическими и электрическими устройствами, например
или
Первое из них механическое- описывается уравнением 
Где a и b углы на входе и выходе устройства, J – момент инерции диска, С – коэффициент упругости пружины.
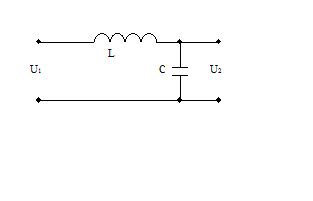
Второе устройство электрическое описывается уравнением
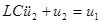
где u1 и u2 напряжения на входе и выходе электрической цепи L и С – её индуктивность и ёмкость.
Для устройств, дифференциальное уравнение которых имеет порядок не выше второго, а это как правило системы с сосредоточенными параметрами(в механике системы с одной степенью свободы) можно записать


где x1 – входная, а x2 – выходная величины, которые обычно отсчитываются от их значений, соответствующих положению равновесия. В частном случае, когда a1=b0=b1=0 из этого уравнения получается уравнение устройств, показанных на рисунках.
В правой части уравнения расположены возмущающие силы, а в левой реакция на возмущения со стороны измерительной системы
Динамическим звеном называется устройство любой физической природы и любой конструкции, описываемое дифференциальным уравнением определённого вида. Понятие динамического звена позволяет рассматривать характеристики различных устройств независимо от их конструкции. Здесь и далее рассматриваются только линейные устройства с постоянными параметрами, которым соответствует линейное дифференциальное уравнение второго порядка с постоянными коэффициентами.
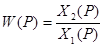
Для классификации звеньев вместо дифференциального уравнения можно использовать передаточную функцию.
Передаточной функцией динамического звена называется отношение изображений по Лапласу выходной и входной величин при нулевых начальных условиях. Передаточная функция определяется дифференциальным уравнением звена и наоборот. Для получения передаточной функции из дифференциального уравнения нужно заменить в нём выходную и входную величины x2(t) и x1(t) их операторными изображениями X2(P) и X1(P) а вместо первой, второй и других производных этих величин записать указанные изображения, умноженные на Р, Р2 и т.д., где Р аргумент операторного преобразования функции времени. Из полученного в результате такой замены операторного уравнения определяется передаточная функция
Например, для последнего уравнения получим

откуда
Из определения передаточной функции следует, что изображение выходной величины звена равно

Любые приборные и автоматические системы могут быть разбиты на отдельные звенья, каждое из которых описывается дифференциальным уравнением не выше второго порядка. При этом один реальный элемент не обязательно сводится к одному звену, возможны случаи, когда один элемент приходится заменять сочетанием двух и более звеньев, каждое из которых описывается уравнением не выше второго порядка. Типовые звенья делятся на три большие группы: позиционные, интегрирующие и дифференцирующие.
Типовые звенья
| № п/п | Тип звена | Передат. ф-я | |
| Позиционные | Безынерционное | k | |
| Апериодическое 1-го порядка | 
| ||
| Апериодическое 2-го порядка | 
| ||
| Колебательное | 
| ||
| Консервативное | 
| ||
| Интегри- рующие | Идеальное интегрирующее | 
| |
| Интегрирующее с замедлением | 
| ||
| Дифференцирующие | Идеальное дифференцирующее | kP | |
| Дифференцирующее с замедлением | 
|
Позиционными (статическими) называются звенья, в которых в установившемся режиме существует линейная зависимость между входной и выходной величинами (рис. А). Коэффициент пропорциональности между ними называется коэффициентом передачи звена. Этот коэффициент безразмерен, если размерности входной и выходной величин одинаковы.
Интегрирующими называются звенья, в которых в установившемся режиме линейная зависимость связывает входную величину и производную выходной величины (рис. Б). В этом случае выходная величина пропорциональна интегралу по времени от входной величины, чем и обусловлено название звена. Коэффициент передачи звена имеет в этом случае размерность с-1, если размерности входной и выходной величин одинаковы.
К дифференцирующим относятся звенья, в которых в установившемся режиме выходная величина пропорциональна производной по времени от входной величины.(рис. В). Коэффициент передачи звена имеет размерность секунды, если размерности входной и выходной величин одинаковы.
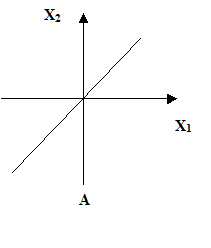
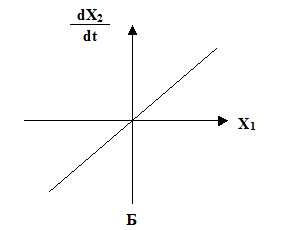
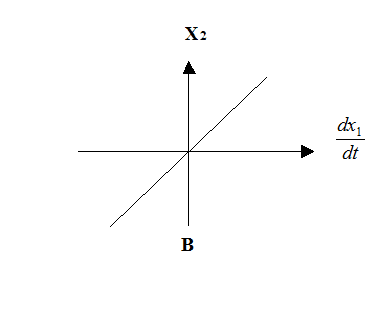
Приведённые на рис. зависимости относятся к установившимся режимам работы звеньев т.е. являются статическими характеристиками этих звеньев.
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 1641; Нарушение авторских прав?; Мы поможем в написании вашей работы!