КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Оптимизация проектных решений
|
|
|
|
Как уже отмечалось, важнейшей предпосылкой автоматизации процесса проектирования является возможность нахождения оптимального варианта технической системы. Техническая система одной структуры может иметь несколько допустимых решений за счет различных значений ее параметров. В этом случае возможен такой набор значений параметров, который обеспечивает оптимальное решение. Процесс поиска решения называют параметрической оптимизацией. В дальнейшем при рассмотрении различных аспектов процесса оптимизации всегда имеется в виду параметрическая оптимизация, а структура системы считается заданной. Используя параметрическую оптимизацию, можно проводить оценку различных структур системы, сравнивая между собой их оптимальные варианты. Синтез вариантов системы осуществляется с помощью математической модели, представляющей собой совокупность формул, позволяющих определить все интересующие нас проектные характеристики технической системы. В общем случае эта модель выглядит следующим образом.
Имеется вектор X = (х 1, х 2,..., хn) независимых внутренних параметров, значения которых однозначно определяют все характеристики изделия, в том числе значения целевой функции F и функций ограничений R 1, R 2,..., Rm. Таким образом, целевая функция и функции ограничений зависят от внутренних параметров. Эта зависимость в общем случае нелинейна. Независимые параметры — это обычно размеры изделия или характеристики его элементов. Так, для шпиндельного узла независимыми параметрами могут быть диаметры опорной шейки, межопорной части, длина консоли, жесткость подшипника и т. д.
В процессе оптимизации часть независимых внутренних параметров подвергается изменениям в определенных пределах. Такие параметры называют управляемыми, а пределы их изменений — параметрическими ограничениями. Формальная постановка задачи параметрической оптимизации сводится к нахождению таких значений независимых параметров, при которых целевая функция F = F (X) достигает своего минимума при
xj ≥ 0, j = 1, 2,...., n (1)
и
Ri (X) ≤ 0, i = 1,2,..., m; m ≤ n, или m ≥ n. (2)
К такой постановке может быть приведена любая реальная задача. Действительно, если по смыслу задачи требуется максимизация целевой функции, то, умножая ее на минус единицу, получаем требуемую форму.
Геометрическая интерпретация постановки задачи оптимизации для случая двух независимых переменных показана на рис. 3, где нанесены линии постоянного уровня целевой функции F (х 1, х 2) и функций ограничений Ri (x 1, x 2), i = 1, 2, 3.
В каждой точке одной такой линии целевая функция (функция ограничений) имеет одно и то же постоянное значение. Уравнением линии постоянного уровня является выражение
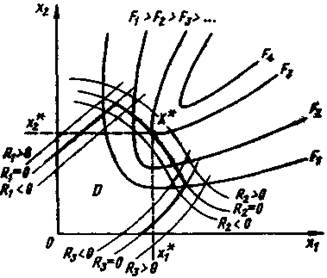
Рис. 3. Геометрическая интерпретация задачи
оптимизации
F (x 1, x 2) = а [или Ri (x 1, х 2) = аi ],
где, а = const. Задавая различные значения постоянной а, получим семейство линий постоянного уровня.
Условия (1) и (2) выделяют область D — область допустимых решений. Минимум целевой функции в данном случае находится на границе области D в точке X* = (хi *, х 2*). Такой минимум называется условным, а задача его нахождения — условной оптимизацией, в отличие от безусловной оптимизации, когда ищется минимум целевой функции в отсутствии функций ограничений. В технических задачах ограничения имеются практически всегда.
Критерии оптимальности. Перейдем теперь к рассмотрению ключевого вопроса решения задач оптимизации — выбору целевой функции. Напомним, что целевая функция позволяет получить количественную оценку качества проектируемого изделия. Такой оценкой, в рамках принятой нами модели, может быть вектор выходных характеристик
Y = (y 1, у 2,..., ys),
который, как отмечалось, однозначно определяется значениями независимых параметров xj.
Отдельные выходные характеристики (условимся называть их частными критериями) yk, k = 1, 2,..., s — это, по существу, технико-экономические показатели изделия. Например, применительно к станку это могут быть его производительность, точность, материалоемкость и т. п. Обычно предельно допустимые значения выходных характеристик содержатся в техническом задании на проектирование. Обозначим эти значения через yk т.з.. Тогда выражение
yk - yk т.з ≤ 0 (3)
можно назвать условием работоспособности.
Приведенная форма этого условия может быть реализована для любых характеристик, так как когда по смыслу задачи требуется обратное неравенство, оно может быть заменено неравенством вида (3), если вместо yk и yk т.з взять их обратные величины.
Степень выполнения требований технического задания может быть оценена выражением
 .
.
Критерии Δ yk не противоречат принятому условию минимизации целевой функции, а их безразмерная форма позволяет сравнивать между собой характеристики разной физической природы. Основные трудности в использовании критериев yk или Δ yk для оценки проекта состоят в том, что эти критерии не являются независимыми, так как все они — функции внутренних параметров.
Среди этих критериев всегда находятся такие, улучшение которых приводит к ухудшению других. Такие критерии называются конфликтными. Наличие конфликтных критериев не позволяет ставить целью одновременное улучшение всех выходных характеристик изделия, требуется поиск компромиссного решения. Отметим, что такое решение в принципе не может быть формализовано, а, следовательно, и автоматизировано, так как цель — прерогатива человека и его деятельности.
Задачи, в которых качество изделия требуется оценивать и улучшать по нескольким характеристикам одновременно, называют задачами многокритериальной оптимизации. К этой категории относятся практически все задачи, с которыми сталкивается конструктор-станкостроитель. Рассмотрим некоторые подходы к формированию целевой функции в многокритериальных задачах. Самым простым подходом является такой, когда из набора частных критериев выбирают главный, который принимают в качестве целевой функции. В этом случае оптимальное решение имеет большой запас по выбранному критерию и полное отсутствие запасов по остальным. В станкостроении использование частного критерия как целевой функции можно рекомендовать только при проектировании уникального оборудования, когда получение требуемого качества (например, сверхточный станок и т. п.) окупает почти любые издержки.
Наиболее распространенным подходом в многокритериальных задачах является формирование аддитивного критерия. Целевая функция в этом случае имеет вид
 ,
,
где Ck — так называемые весовые коэффициенты, определяющие степень влияния каждого частного критерия на целевую функцию. Их численные значения находят с помощью экспертных оценок. Обычно полагают
 .
.
Основной недостаток аддитивного критерия — отсутствие объективной достоверности значений весовых коэффициентов. Если при проектировании технического объекта имеется возможность полно и достоверно оценить произведенные затраты, то их также можно использовать в качестве целевой функции. Более того, можно утверждать, что минимизация затрат — наилучший подход при проектировании, так как это единственный способ получения «объективной» оценки такого субъективного понятия как цель. Здесь необходимо подробно пояснить, что имеется в виду под полным учетом затрат. Лучше всего это делать на конкретном примере. Допустим, мы проектируем станок, который должен быть встроен в автоматическую линию, предназначенную для изготовления деталей автомобильного двигателя. При сравнении различных вариантов проекта для полного учета затрат необходимо, кроме всего прочего, учесть приведенные эксплуатационные расходы в автоматической линии (они существенно зависят от надежности и ремонтопригодности конструкции), расходы на изготовление двигателя и в период эксплуатации автомобиля (на них влияет уровень качества изготовленных деталей). Как видим, полный учет затрат — дело довольно сложное и в настоящее время мало разработанное. Это обстоятельство является основным сдерживающим фактором в применении стоимостного критерия в оптимизационных задачах.
Заканчивая на этом рассмотрение вопроса о выборе целевой функции, подчеркнем, что качество оптимального решения целиком зависит от того, какой критерий выбран для оценки.
Минимальное значение целевой функции может быть найдено непосредственно, если она выражена аналитически.
Обычно в технических задачах аналитические выражения для целевой функции и функций ограничений отсутствуют. Поэтому минимум целевой функции определяют, используя поисковую оптимизацию. Суть этого процесса состоит в том, что определяют последовательный ряд точек, образующих траекторию в пространстве независимых параметров, двигаясь вдоль которой можно достичь минимума целевой функции. При этом в каждой точке вычисляют значение целевой функции и проверяют условия прекращения поиска. Таким условием может быть, например, незначительное, по сравнению с предыдущим шагом, уменьшение целевой функции.
Рассмотрим некоторые методы поиска минимума целевой функции. Большинство методов разработано для случаев безусловной оптимизации, но их можно применять в задачах с ограничениями, так как существуют приемы сведения задач условной оптимизации к задачам безусловной оптимизации. Существо метода и его название определяются способом выбора направления поиска в пространстве независимых параметров.
Самым простым методом поиска является метод полного перебора. При этом всю область D разбивают на элементарные подобласти, в каждой из которых вычисляют целевую функцию. Сравнивая полученные значения между собой, находят минимум целевой функции. Метод наиболее удобен для задач с небольшим количеством независимых параметров (три-четыре) и ограниченными диапазонами их изменений.
Метод координатного спуска предполагает направление поиска на очередном шаге, совпадающем с направлением одной из координатных осей. Другими словами, имеет место последовательная оптимизация по каждому независимому параметру. Например, вначале осуществляется движение в направлении оси Х 1 до тех пор, пока целевая функция уменьшается. Когда такое уменьшение прекращается, начинают движение в направлении оси Х 2 и т. д. После окончания полного цикла спусков по направлениям всех независимых параметров вновь возвращаются к направлению Х 1 и реализуют новый цикл. Так продолжают до тех пор, пока не находят минимум целевой функции. Траектория, соответствующая описанному алгоритму, показана на рис. 4 для случая двух независимых переменных.
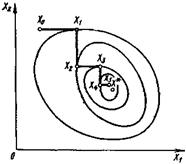 Рис. 4. Метод координатного спуска
Рис. 4. Метод координатного спуска
| 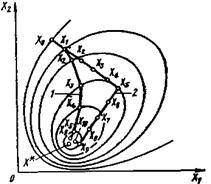 Рис. 5. Метод градиента (1) и метод наискорейшего спуска (2)
Рис. 5. Метод градиента (1) и метод наискорейшего спуска (2)
|
В следующих двух методах — методе градиента и методе наискорейшего спуска — при выборе направления поиска используют информацию о градиенте целевой функции. Так как направление градиента определяет направление наиболее быстрого возрастания целевой функции, то целесообразно поиск ее минимума вести в антиградиентном направлении. При этом метод градиента предусматривает определение этого направления в каждой точке траектории поиска, а при методе наискорейшего спуска движение в антиградиентном направлении осуществляется до тех пор, пока происходит уменьшение целевой функции. На рис. 5 изображены траектория 1 поиска по методу градиента и траектория 2 наискорейшего спуска. Сравнивая траектории 1 и 2, можно заключить, что метод наискорейшего спуска требует большего числа шагов, но при этом методе реже вычисляется градиент целевой функции.
Сведение задач условной оптимизации к безусловной может быть, выполнено, в частности, с помощью метода штрафных функций. Суть метода заключается в замене целевой функции F (X) исходной задачи на обобщенный критерий, значения которого совпадают с F (X) внутри области допустимых решений и резко возрастают вне ее. В обобщенный критерий T (X, t) вводится коэффициент штрафа t.
Минимум функции Т (X, t) стремится к минимуму функции F (X) при t → ∞. Для всех X  D можно обойтись без штрафных функций, если заранее известно, что минимум лежит внутри области D. Обычно такая априорная информация отсутствует.
D можно обойтись без штрафных функций, если заранее известно, что минимум лежит внутри области D. Обычно такая априорная информация отсутствует.
Метод случайного поиска реализует выбор направления поиска на каждом шаге случайным образом, например, используя таблицы случайных чисел. Так, из некоторой точки Xk переходят в точку Xk +1, и если при этом оказывается F (Xk +l) < F (Xk), то попытка считается удачной и поиск продолжают из точки Xk +l. Если F (Xk +1) ≥ F (Xk), то попытка считается неудачной, и из точки находят новое случайное направление. Поиск прекращают после L неудачных попыток. Число попыток L задают заранее, его значение определяют из опыта решения подобных задач. Этому методу присущ тот недостаток, что точки, в которых вычисляются значения F (X), могут распределиться неравномерно в пространстве независимых параметров, из-за чего определенные области этого пространства окажутся вне анализа.
Этот недостаток отсутствует в методе линейного программирования (ЛП-поиска). Математический аппарат метода обеспечивает формирование векторов X 1, Х 2 ,..., ХN в N точках, равномерно расположенных в пространстве независимых параметров. Другим важным достоинством этого метода является выработанная удобная форма анализа комплекса частных критериев в виде так называемой таблицы испытаний. Под испытанием здесь понимаем определение значений параметров и критериев в одной из N точек. Таким образом, общее число испытаний равно N, и для каждого из них вычисляют значения всех частных критериев. Каждому критерию в таблице испытаний отведена одна строка, в которой значения этого критерия располагают в порядке возрастания с указанием номера испытаний. Сумма таких строк по всем частным критериям позволяет анализировать комплекс этих критериев при отсутствии целевой функции в явном виде, рассмотрев все возможные компромиссы.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 2082; Нарушение авторских прав?; Мы поможем в написании вашей работы!