КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример 2 – Создание упрощенной модели робота-манипулятора на тележке
|
|
|
|
Техническое задание
A. Сделать трехмерную модель тележки с манипуляционным звеном, к которому прикреплен обобщенный инструмент, согласно чертежной документации, приводимой ниже.
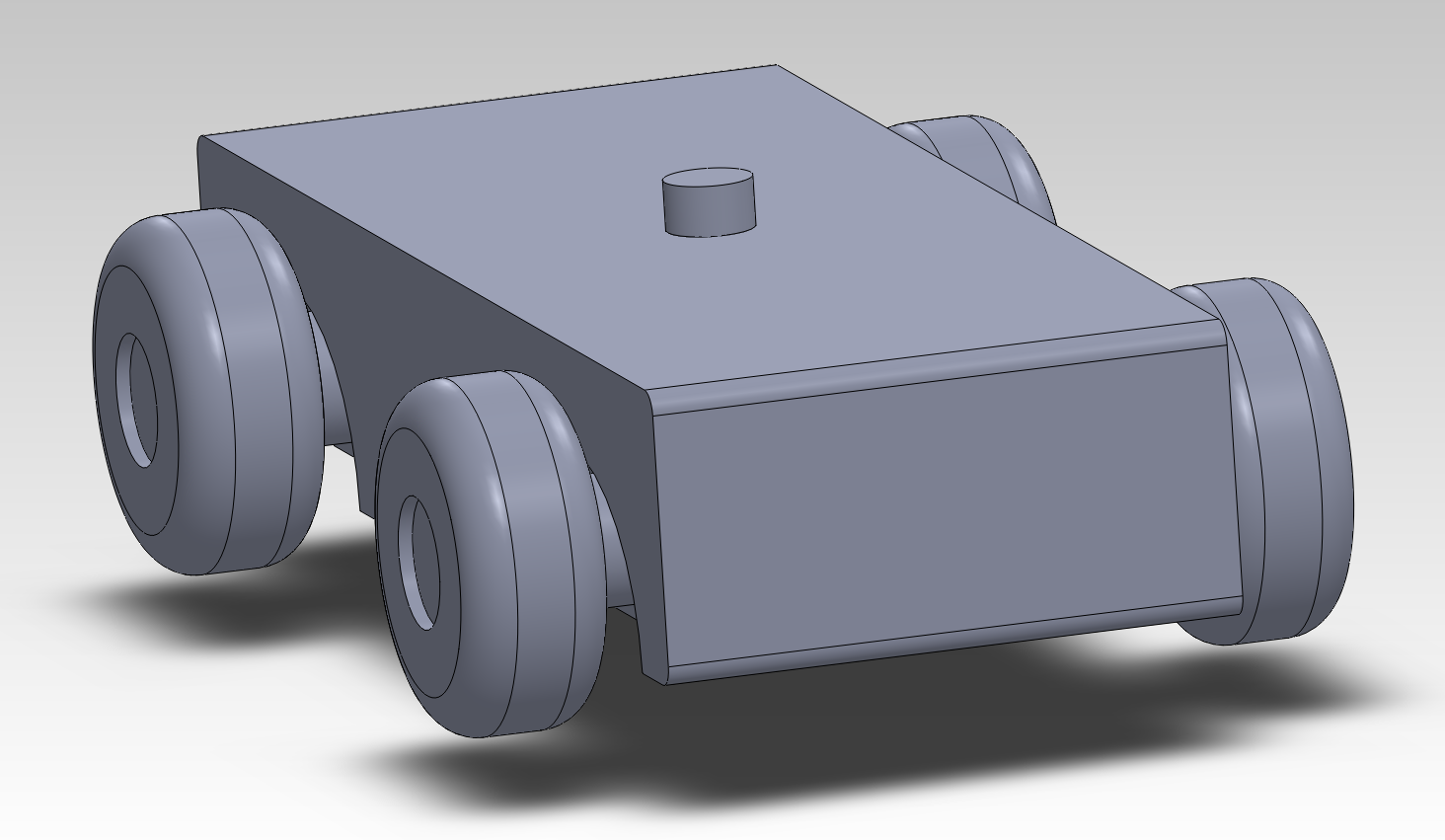
Рис.3.1 Представление-3D сборки Тележка

Рис.3.2 Виды детали Корпус
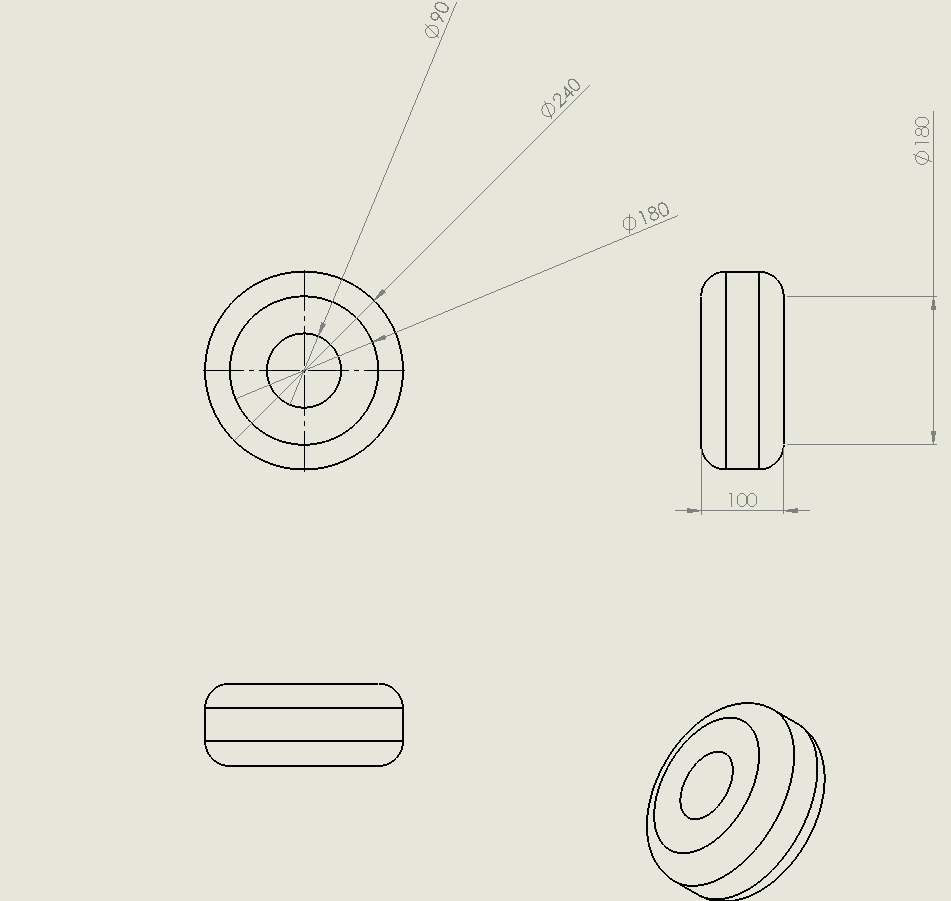
Рис.3.3 - Виды детали Колесо

Рис.3.4 - Виды деталиОсь 1
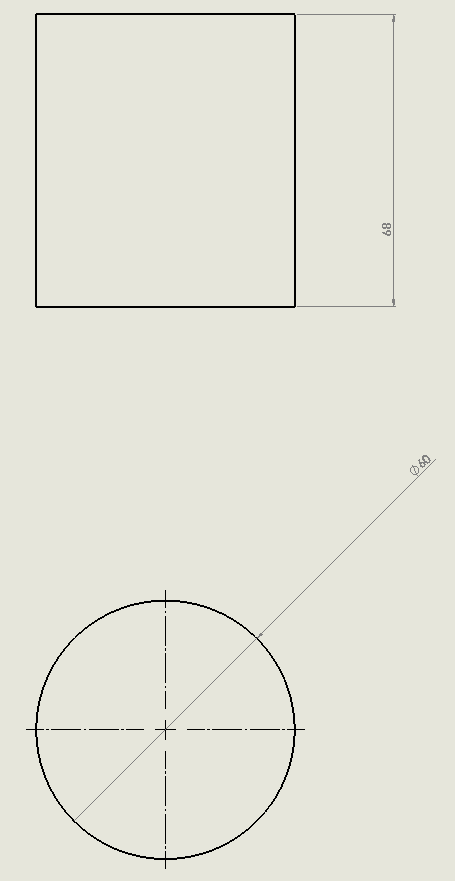
Рис.3.5 - Виды детали Ось вращения основания рычага

Рис.3.6 - Виды сборки Тележка (с указанием размеров взаимной ориентации деталей), включающей детали:Корпус, Ось 1, Дубль(Ось1), Колесо, 3 копии (Колесо), Ось вращения основания рычага
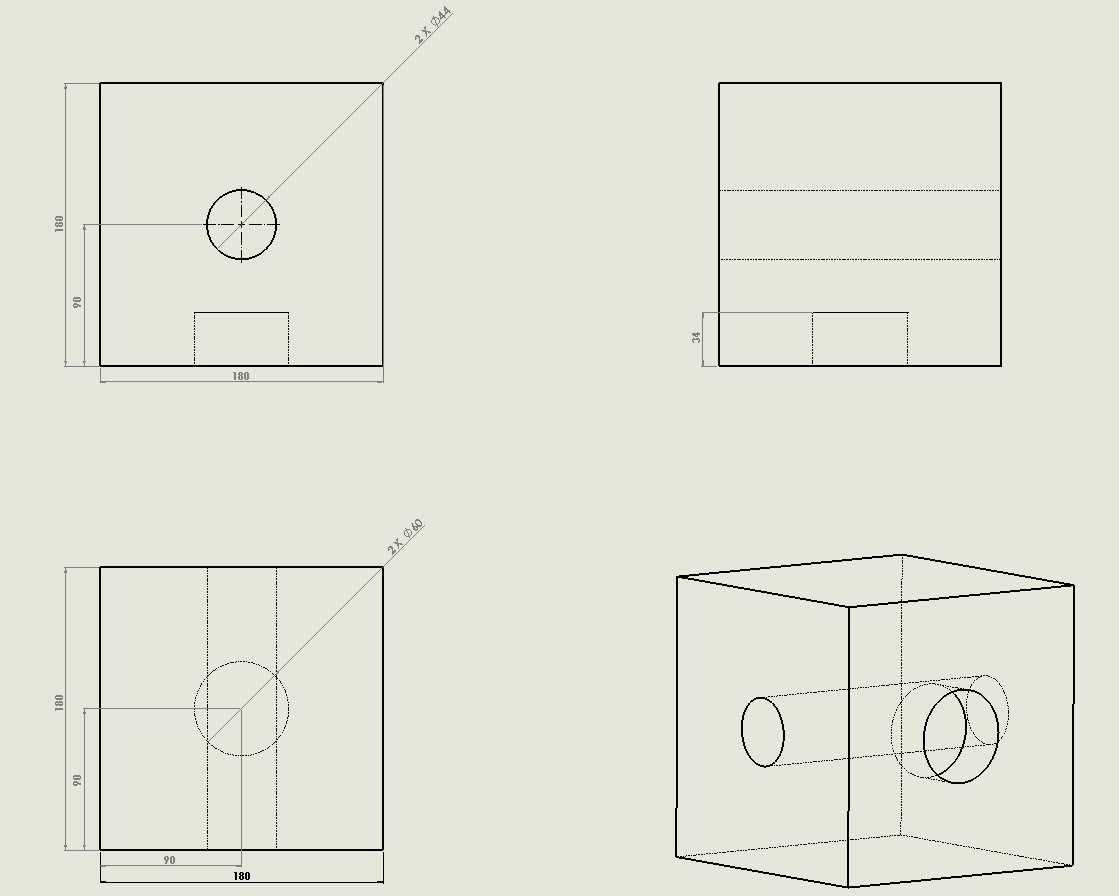
Рис.3.7 - Виды детали Основание рычага

Рис.3.8 - Виды детали Рычаг нижний
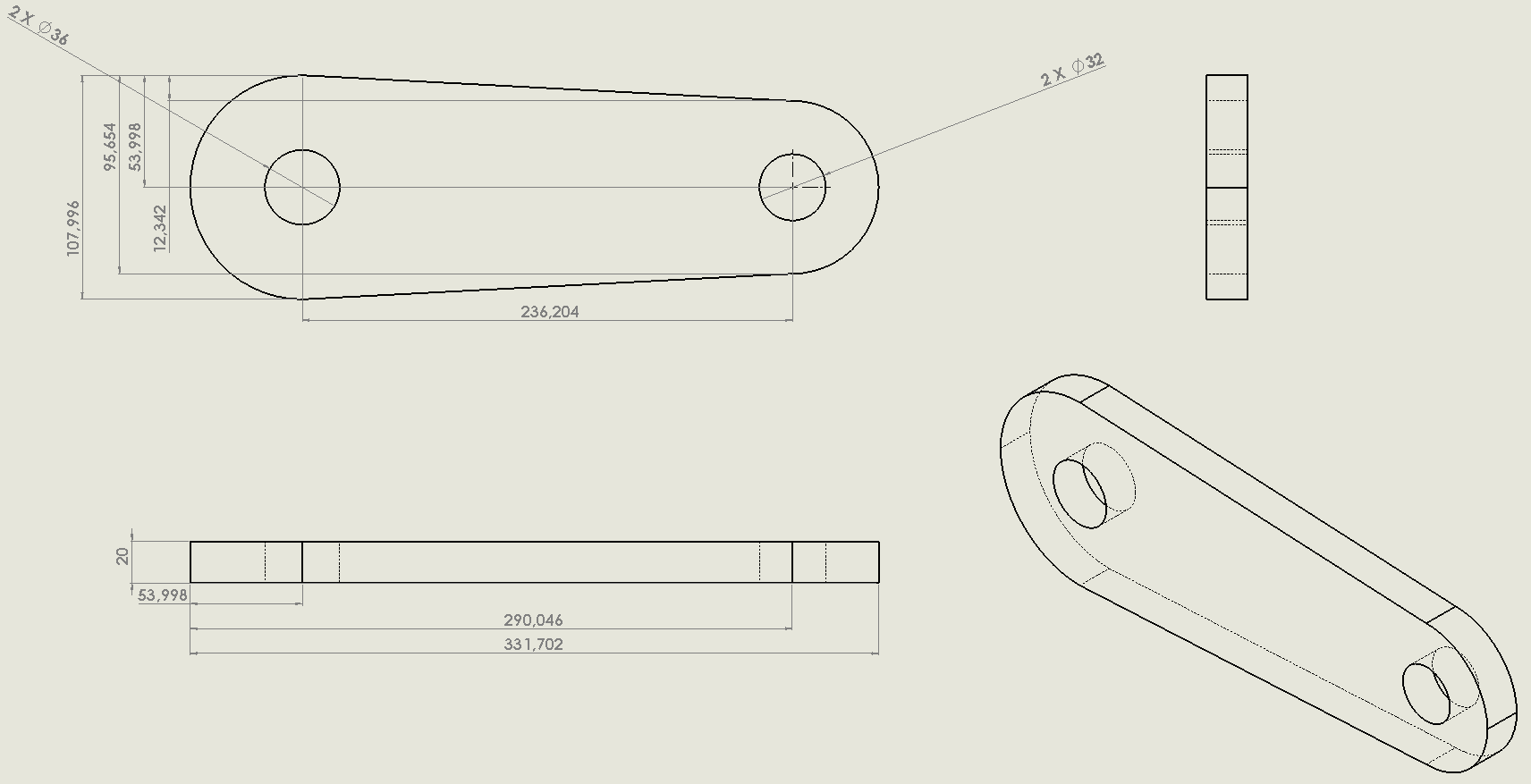
Рис.3.9 - Виды детали Рычаг верхний
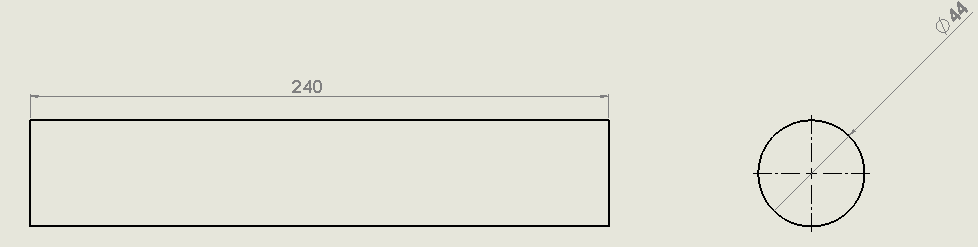
Рис.3.10 - Виды детали Ось сочленения основания и нижнего рычага
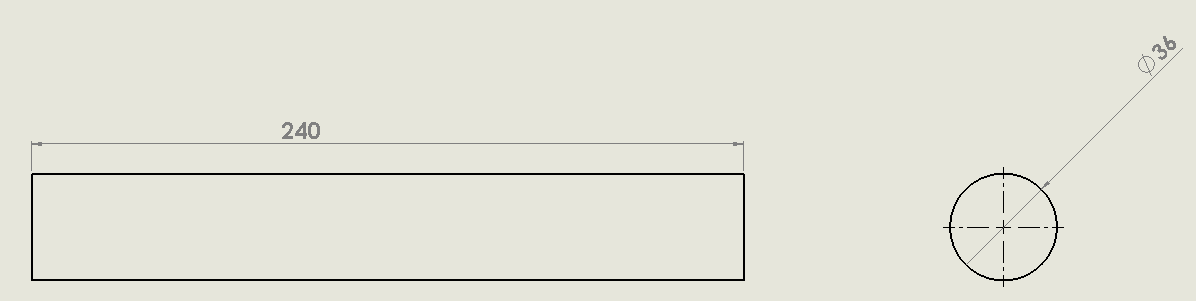
Рис.3.11 - Виды детали Ось сочленения нижнего и верхнего рычагов
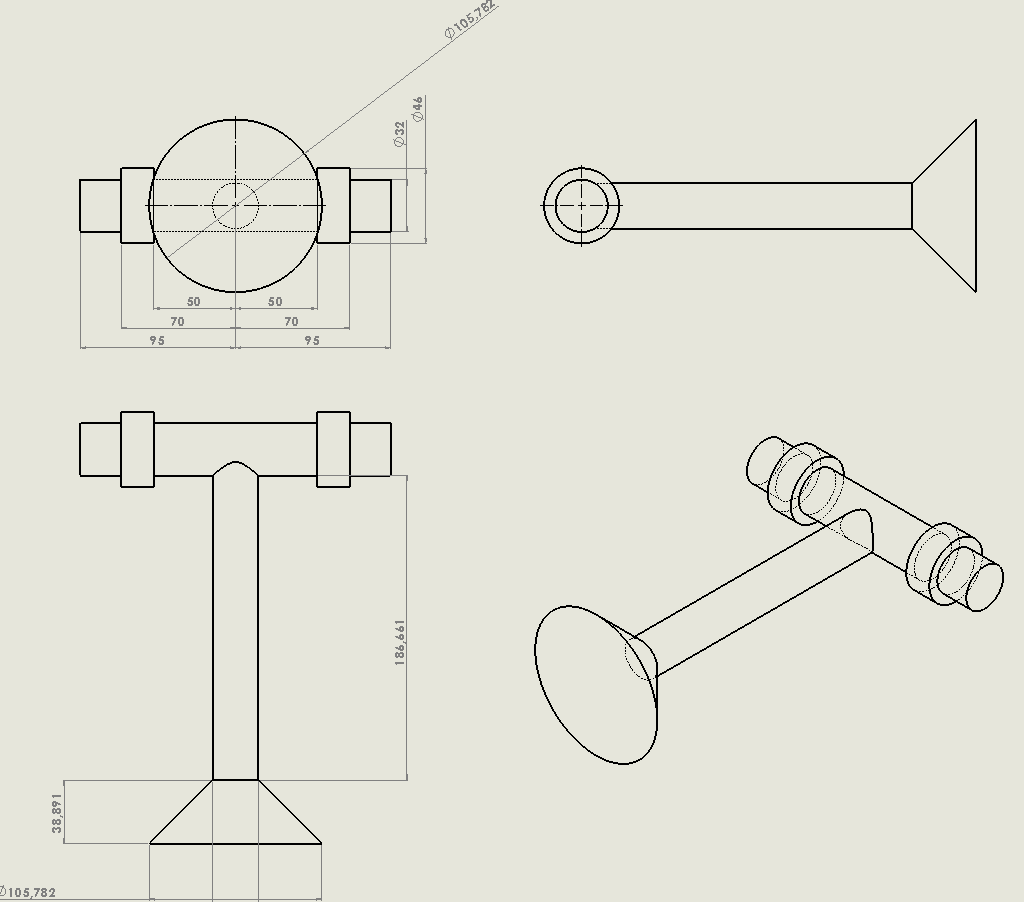
Рис.3.12 - Виды детали Инструмент с осью 3
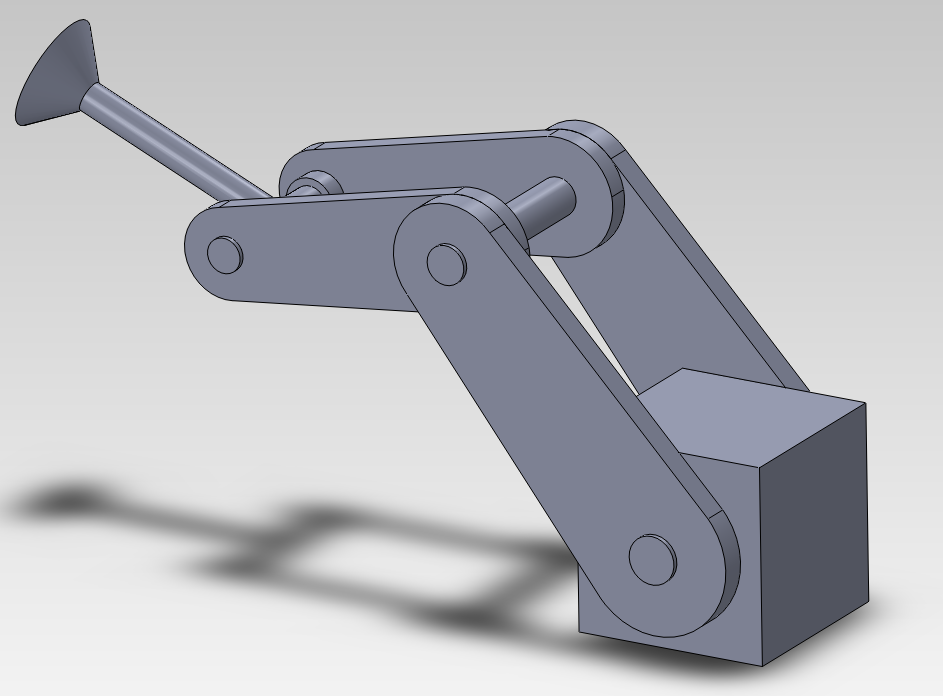
а) Представление-3D сборки Рычагов Система
Рис.3.13 - Представление-3D сборки Рычагов Система
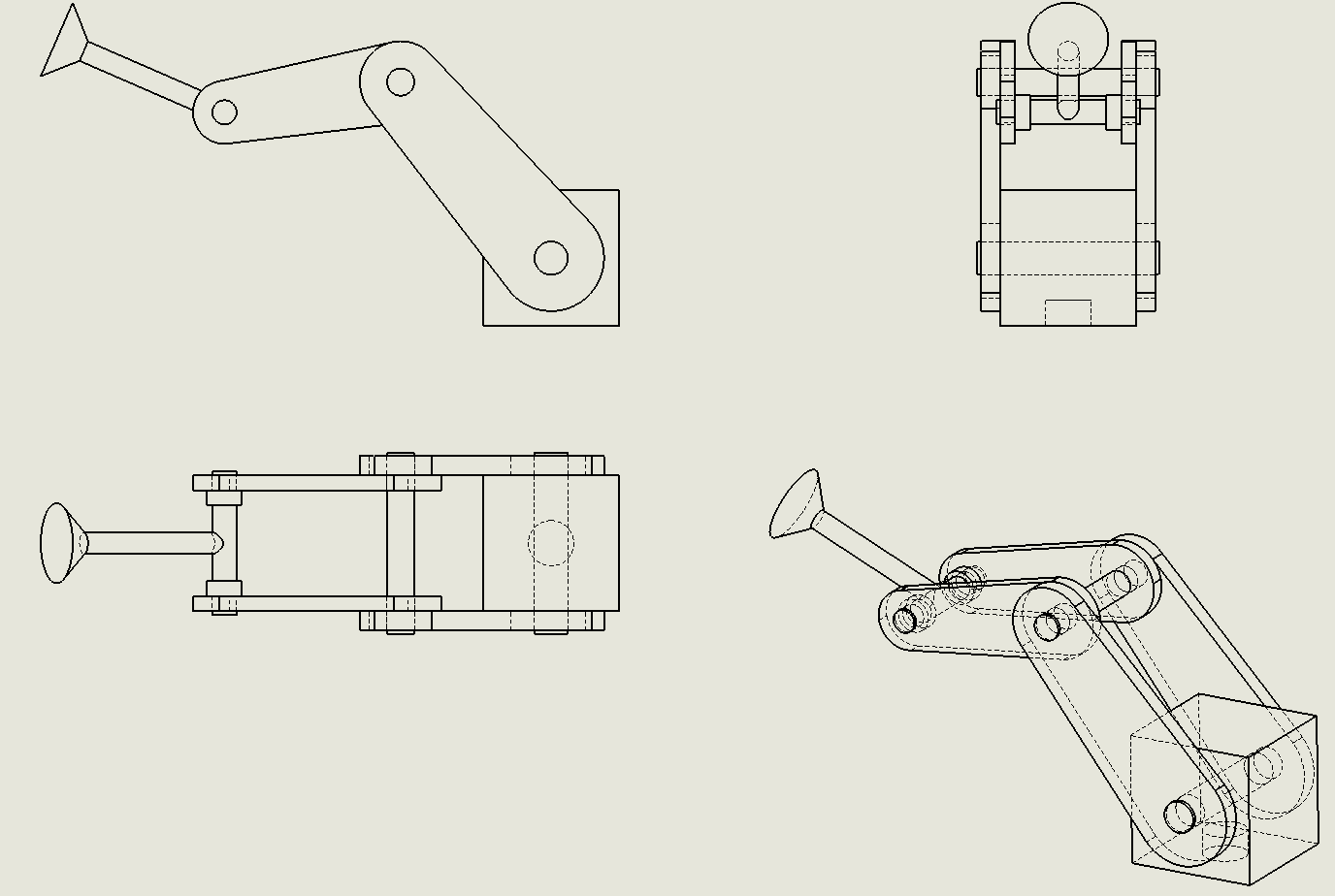
б)Виды сборки Рычагов Система, включающей детали:
Основание рычага, Рычаг нижний, Дубль(Рычаг нижний), Рычаг верхний, Дубль(Рычаг верхний),Ось сочленения основания и нижнего рычага, Ось сочленения нижнего и верхнего рычагов,Инструмент с осью 3
Рис.3.13
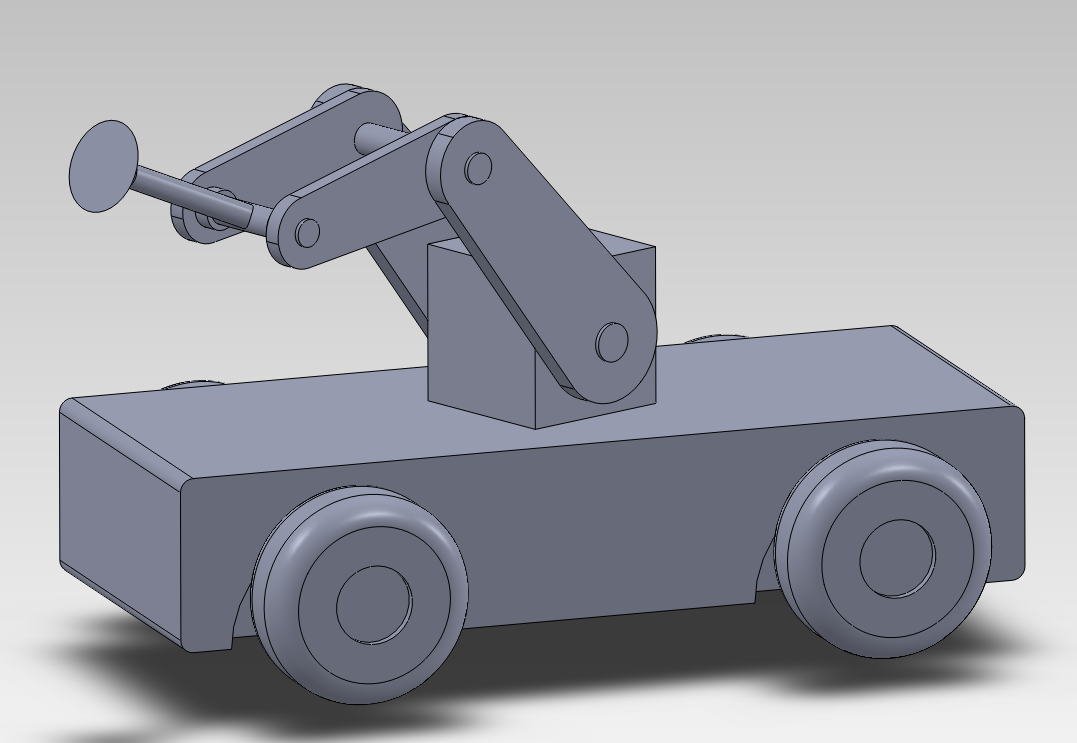
а)Представление-3D полной сборки Робот-манипулятор на тележке

б) Виды сборки Робот-манипулятор на тележке
Рис.3.14
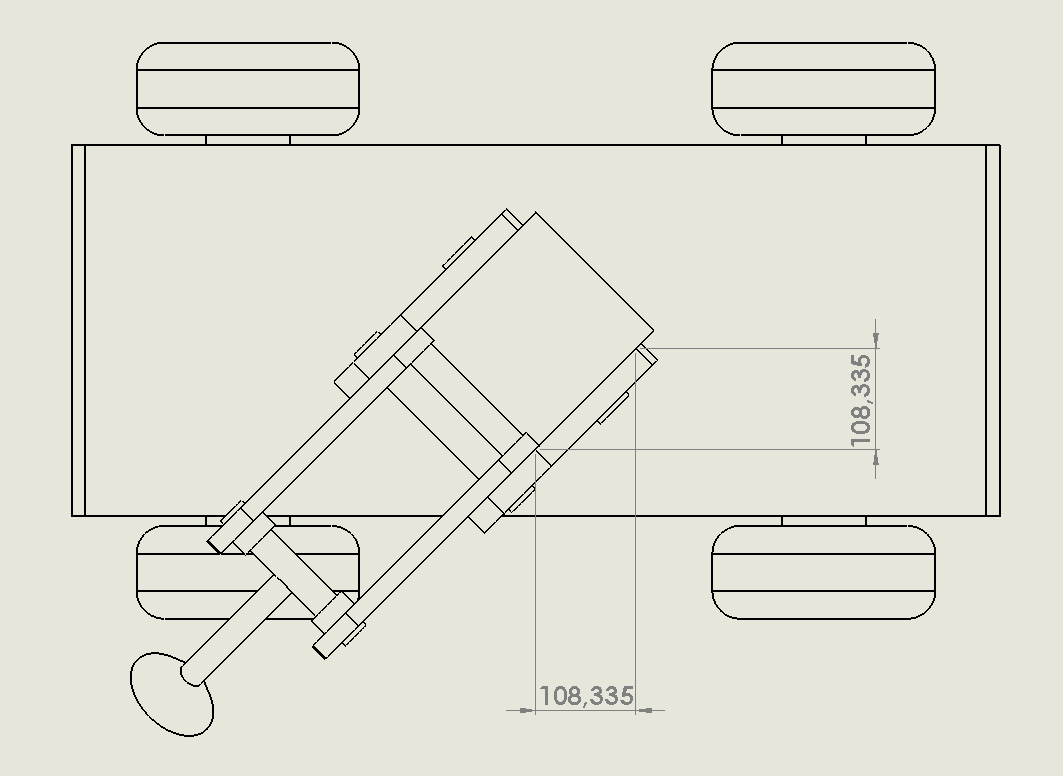
B. Рассчитать массо-инерционные характеристики сборки в двух её положениях. Геометрические взаимосвязи деталей сборок в обоих положениях даются дополнительными видами, представленными на рисунках 2.15 и 2.16. (рис.2.15 соответствует положению 1, а рис.2.16 - положению 2).
Дополнительные исходные данные для определения массо-инерционных характеристик сборки в двух положениях:
2) Масса всех деталей кроме колес и инструмента составляет m1=150 кг. Приближенно считать, что вещество распределено по каждой из этих деталей равномерно.
3) Плотность детали Инструмент в 1,3 раза меньше средней плотности деталей в сборке Рычагов Система.
4) Колеса считать резиновыми (бутил,  ).
).
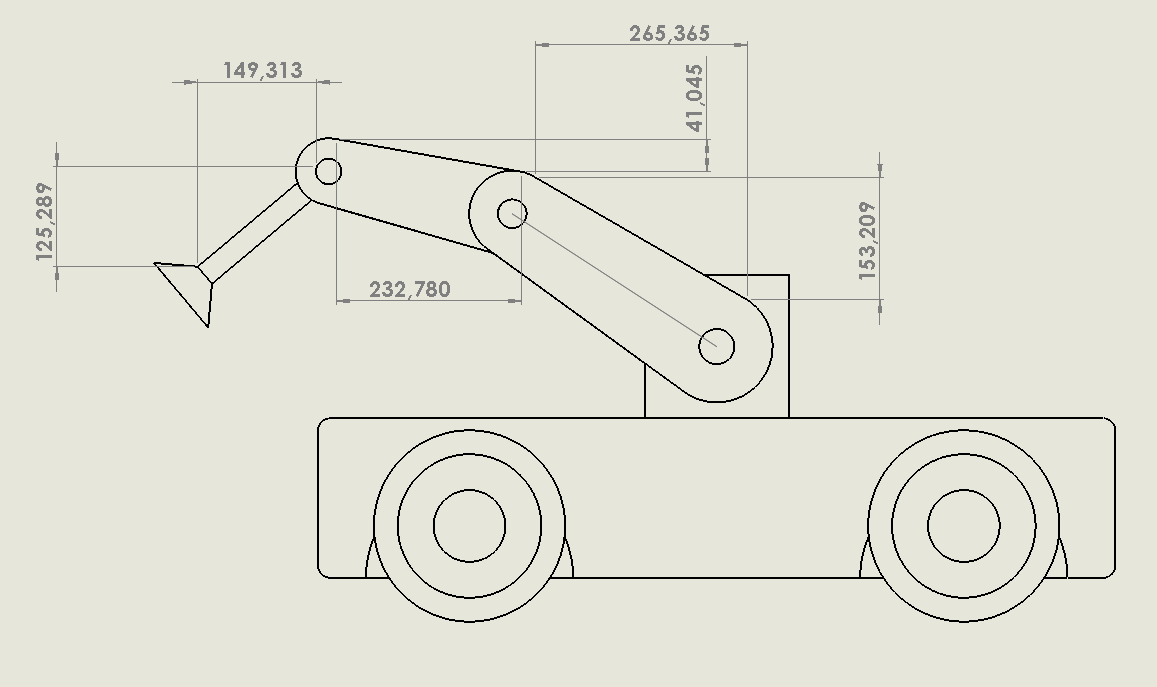
Рис.2.15

а)
б)
Рис.2.16
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 1575; Нарушение авторских прав?; Мы поможем в написании вашей работы!