КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Постановка задачи и основные определения
|
|
|
|
Тема 6.8. Многомерная оптимизация
6.8.1. Постановка задачи и основные определения
6.8.2. Методы спуска
6.8.3. Метод градиентного спуска с дроблением шага
6.8.4. Метод наискорейшего спуска
6.8.5. Технология решения задач многомерной оптимизации средствами математических пакетов
Задача, требующая нахождения оптимального значения функции m переменных f(Х)=f(x1, x2, …, xm), называется задачей многомерной оптимизации. Так же, как и для случая одномерной оптимизации, задача нахождения максимума функции сводится к задаче нахождения минимума путем замены целевой функции f на -f.
Пусть функция f(Х) = f(x1, x2, …, xm) определена на некотором множестве ХÎRm. Если Х=Rm (т.е. ограничения на переменные x1, x2, …, xm отсутствуют), принято говорить о задаче безусловной минимизации. В противном случае, когда Х ¹ Rm, говорят о задаче условной минимизации.
Методы решения задачи безусловной минимизации являются основой для перехода к изучению более сложных методов решения задач условной минимизации.
В постановке задачи безусловной оптимизации для f(Х)=f(x1, x2, …, xm) требуется найти хотя бы одну точку минимума Х* и вычислить f*=f(Х*). Точка Х*ÎRm называется точкой глобального минимума функции f на множестве Х, если для всех ХÎRm выполняется неравенство f(Х*)£f(Х). В этом случае значение f(Х*) называется минимальным значением функции f на Rm.
Точка Х*Î Rm называется точкой локального минимума функции f, если существует такая d - окрестность Ud этой точки (d>0), что для всех ХÎХd=Х  Ud выполняется неравенство f(X*)£f(X).
Ud выполняется неравенство f(X*)£f(X).
Подавляющее большинство методов решения задачи безусловной минимизации в действительности являются методами поиска точек локальных минимумов, среди которых затем выделяют глобальный минимум, являющийся наименьшим. Этот способ очень трудоемок, поэтому чаще используют другой: местоположение точки глобального минимума определяют в ходе анализа решаемой задачи, а затем для его уточнения с заданной точностью применяют один из методов поиска точки локального минимума.
Рассмотрим функцию нескольких переменных и введем для нее основные определения.
Множество точек, для которых целевая функция принимает постоянное значение f(x1, x2, …, xm) = c, называется поверхностью уровня. Для функции двух переменных (m = 2) это множество называется линией уровня.
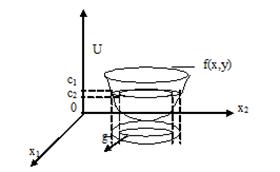
Рис. 6.8.1-1
Функция f(x1,x2) задает в трехмерном пространстве некоторую поверхность U=f(x1,x2) (рис. 6.8.1-1), низшая точка которой и дает решение задачи минимизации. Для того чтобы изобразить рельеф этой поверхности, проведем несколько плоскостей
(U = const): U=c1, U=c2, U=c3. Проекции на плоскость Ох1х2 линий пересечений этих плоскостей с поверхностью и дают линии уровня.
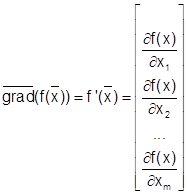
Для дифференцируемой функции можно определить вектор из первых частных производных, который называется градиентом  :
:
 или
или 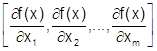 .
.
Направление вектора градиента указывает направление наискорейшего возрастания функции, а его модуль (длина) равен скорости возрастания функции. Вектор Градиент нормален к линии уровня в каждой своей точке и касателен к поверхности, которую задает функция.
Вектор - называется антиградиентом и показывает направление наискорейшего убывания функции.
Равенство нулю градиента в точке Х является необходимым условием того, чтобы внутренняя для множества Хi (i = 1, 2,…m) точка Х была точкой локального минимума дифференцируемой функции f. Точка Х, для которой выполняется равенство f’(X) = 0, называется стационарной точкой функции.
Это равенство представляет собой систему из m нелинейных уравнений относительно компонент х1, х2, …, хm, вектора X, где m – количество переменных.


Для функции двух переменных Q(x, y)это условие имеет вид: 
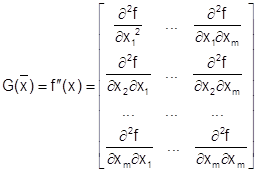
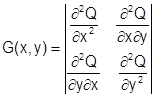
Однако не всякая стационарная точка является точкой минимума. Для всякой непрерывно дифференцируемой функции f достаточным условием того, чтобы стационарная точка Х была точкой локального минимума, является положительная определенность матрицы вторых производных (матрицы Гессе):
Согласно критерию Сильвестра, для того чтобы матрица была положительно определена, необходимо, чтобы все угловые миноры были положительны:
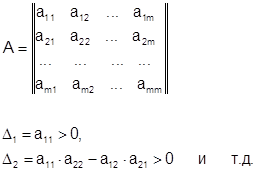
Для функции двух переменных Q(x, y) матрица Гессе имеет вид:
 ,
,
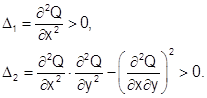
а достаточное условие существования минимума:
Алгоритм решения задачи оптимизации функции двух переменных Q(x,y) аналитическим (классическим) методом следующий:
1. Составляется и решается система уравнений
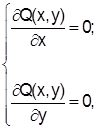 из которой находятся (x*, y*).
из которой находятся (x*, y*).
2. Проверяются достаточные условия существования минимума
. 
Если (x*, y*) – единственное решение и в этой точке выполняются достаточные условия, то это точка минимума. Если хотя бы в одном из неравенств получается знак “<”, то минимума не существует. В случае появления знака “ = ” необходимо исследовать производные высших порядков.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 527; Нарушение авторских прав?; Мы поможем в написании вашей работы!