КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Метод замкнутых контуров
|
|
|
|
ИССЛЕДОВАНИЕ КИНЕМАТИКИ МЕХАНИЗМА АНАЛИТИЧЕСКИМ МЕТОДОМ.
2.1 Замкнутый контур для механизма II класса.
В плоскости нашего механизма введем координатную систему xy с началом в шарнире О. Звенья 1 и 3 заменим соответственно векторами  и
и  . Ползун 2 заменим точкой Е, положение которой задаем двумя векторами и .Точку О1 заменим точкой В.ОВ заменим вектором
. Ползун 2 заменим точкой Е, положение которой задаем двумя векторами и .Точку О1 заменим точкой В.ОВ заменим вектором  ,направленным против оси х. Полученный векторный многоугольник показан на рис.2.1.
,направленным против оси х. Полученный векторный многоугольник показан на рис.2.1.

Рисунок 2.1 – Замкнутый контур для исследуемого механизма
2.2 Характеристика векторов, образующих замкнутый контур механизма.
Вектор изменяется по модулю при движении механизма и является неизвестной функцией времени. Направление этого вектора задано углом  .
.
Вектор не изменяется по модулю (длине) в процессе движения механизма. Модуль этого вектора равен длине ВЕ. Угол b, который определяет положение вектора , изменяется при движении механизма по известному закону  .
.
Вектор не изменяется в процессе движения механизма. Его модуль равен заданному расстоянию ОВ. Направление этого вектора задано углом γ.
2.3 Векторное уравнение замкнутости контура механизма.
Условие замкнутости введенного контура механизма имеет вид
 . (2.1)
. (2.1)
2.4 Проекции векторного уравнения замкнутости контура на координатные оси x и у.
 . (2.2)
. (2.2)
2.5 Решение системы двух уравнений эквивалентной векторному условию замкнутости контура механизма.
Решаем систему (2.2) относительно неизвестных a и β соответственно.
 , (2.4)
, (2.4)
 . (2.5)
. (2.5)
2.6 Угловая скорость звена 3 и проекция скорости точки E ползуна 2 на ось x определим путем дифференцирования по времени t зависимостей (2.6) и (2.7) соответственно.
 . (2.8)
. (2.8)
 . (2.9)
. (2.9)
Формулы (2.8) и (2.9) получены с помощью программы, подготовленной для системы программирования MATLAB.
2.7 Угловое ускорение звена 3 и проекция ускорения точки E ползуна 2 на ось x находим дифференцированием по времени t зависимостей (2.8) и (2.9) соответственно.
 . (2.10)
. (2.10)
 . (2.11)
. (2.11)
Выражения (2.10) и (2.11) получены с помощью программы и здесь не приводятся в силу их громоздкости. Они приводятся в распечатке работы вышеотмеченной программы.
2.8 Графики временных зависимостей основных кинематических параметров движения механизма.
2.9 Звено 1 – кривошип ОE, вращается равномерно против хода часовой стрелки. Модули скорости и ускорения точки E равны
 =473.6 мм/с,
=473.6 мм/с,  =3923 мм/с2
=3923 мм/с2
На рис.2.1 и рис.2.2 приведены графики кинематических параметров углового движения звена 3 и поступательного движения звена 2. Графики выведены на временном интервале, соответствующем длительности T1 одного оборота звена 1. Длительность одного оборота звена 1 равна T1=60/n1=0.75c.
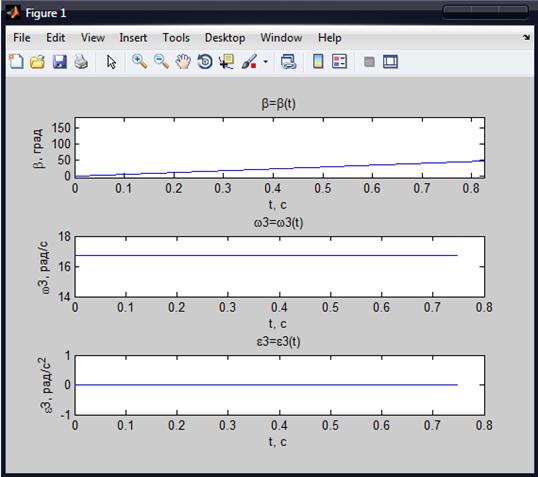
Рисунок 2.1 – Кинематические параметры углового движения звена 3
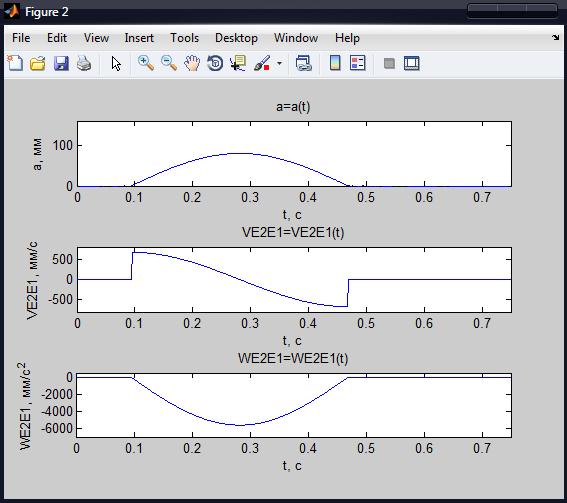
Рисунок 2.2 – Кинематические параметры поступательного движения звена 2
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 3830; Нарушение авторских прав?; Мы поможем в написании вашей работы!