КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
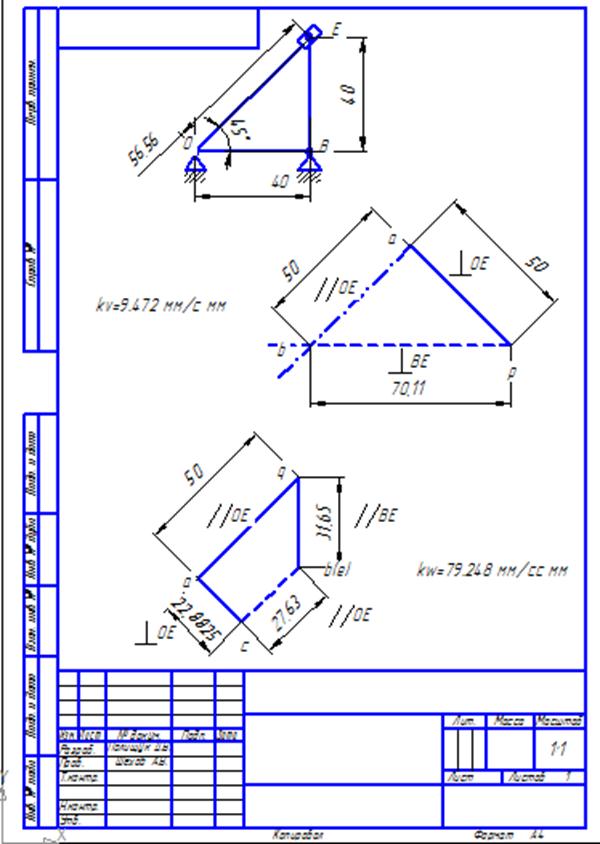
Планы положения, скоростей и ускорений механизма
|
|
|
|
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. «Кинематический анализ приборных механизмов». Ю.И.Добежа, Н.Д.Кошевой.
г.Харьков «ХАИ», 1985г.
2. «Техническая механика» В.Н.Сапрыкин.
г.Харьков «Торсинг», 2003г.
3.Конспект лекций по курсу «Техническая механика. Кинематика».
ПРИЛОЖЕНИЕ
ЛИСТИНГ ПРОГРАММЫ
%
% КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПРИБОРНЫХ МЕХАНИЗМОВ
%
% См. оформление ДЗ в файле ДЗ_2_Кинематика.doc
%
% ИСХОДНЫЕ ДАННЫЕ
%
% Номер кинематической схемы........................................
N_shema=17;
% Вариант данных....................................................
N_data=2;
% Геометрические размеры (задают в мм)...............................
BE=40; OB=40;
% Частота вращения ведущего звена (задают в об/мин).................
n1=80;
pi=3.14;
t=0.3;
%
% 1 СТРУКТУРНЫЙ АНАЛИЗ
% (См. раздел 1 ДЗ)
%
%
% 2 КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ МЕХАНИЗМА АНАЛИТИЧЕСКИМ МЕТОДОМ.
% МЕТОД ЗАМКНУТЫХ КОНТУРОВ
% (См. раздел 2 ДЗ)
%
% 2.1 Векторное уравнение замкнутого контура механизма
% 2.2 Проекции векторного уравнения замкнутого контура на координатные оси
% ось x
eq1='a*cos(alpha+omega1*t)-b*cos(betta)-c';
% ось y
eq2='a*sin(alpha+omega1*t)-b*sin(betta)';
% 2.3 Решение системы 2-х уравнений
syms betta b c t OE omega1 alpha
a=sym('sqrt(b^2-c^2*(sin(alpha+omega1*t))^2)-c*cos(alpha+omega1*t)');
beta=sym('2*(alpha+omega1*t)');
disp('Параметр a --->');disp(a);
disp('');
disp('Параметр beta --->');disp(beta);
disp(' ');
% 2.4 Закон движения ведущего звена 1
% Так как по условиям задачи ведущее звено вращается с постоянной угловой
% скоростью, то время одного оборота этого звена будет равно T1 в сек.
T1=60/n1;
disp(['Время одного оборота ведущего звена T1, с --> ', num2str(T1)]);
% Символьное задание закона движения ведущего звена как функции времени
% Omega1=Omega1(t)
omega1=sym(pi*n1/30);
% Функция времени угла поворота Alpha1(t) ведущего звена
alpha=sym(int(omega1,t)+alpha);
disp('Функция времени угла поворота ведущего звена --->');
disp(alpha);
% задание начального положения ведущего звена в рад
alpha=subs(alpha,'alpha',pi/4);
% 2.5 Законы движения ведомых звеньев (звеньев 2 и звеньев 3)
% 2.5.1 Угол поворота звена 3 (BE) - угол beta
% 2.5.2 Угловая скорость поворота звена 3 (BE) - omega3
omega3=diff(beta,t);
disp('Угловая скорость Omega3 --->');
disp(omega3);
% 2.5.3 Угловое ускорение поворота звена 3 (BE) - epsilon3
eps3=diff(omega3,t);
disp('Угловое ускорение Epsilon3 --->');
disp(eps3);
% 2.5.4 Положение т.E2 относительно начала координат xOy
%%%%%%%%%%%%%%%%%%%%%%%%%%%???????????????????????????????????????????
% 2.5.5 Скорость т.E2 относительно звена 2 (ползуна) - VE2E1
VE2E1=diff(a,t);
disp('Скорость VE2E1 --->');
disp(VE2E1);
% 2.5.6 Ускорение т.E2 относительно звена 2 (ползуна) - WE2E1
WE2E1=diff(VE2E1,t);
disp('Ускорение WE2E1 --->');
disp(WE2E1);
% 2.5.7 Графики кинематических величин поворота звена 3(BE)
alpha0=0;
figure
subplot(3,1,1);
beta=subs(beta,'omega1',pi*n1/30);
beta=subs(beta,'b',BE);
beta=subs(beta,'c',OB);
beta=subs(beta,'alpha0',0)
ezplot(inline(180/pi*betta-'z'),[0 1.1*T1 -4 184])
title '\beta=\beta(t)';
xlabel 't, с';
ylabel '\beta, град';
subplot(3,1,2);
omega3=subs(omega3,'b',BE);
omega3=subs(omega3,'c',OB);
omega3=subs(omega3,'alpha',pi/4);
omega3=subs(omega3,'omega1',pi*n1/30);
plot([0 T1],[omega3 omega3]);
title '\omega3=\omega3(t)';
xlabel 't, с';
ylabel '\omega3, рад/с'
subplot(3,1,3);
eps3=subs(eps3,'omega1',pi*n1/30);
eps3=subs(eps3,'b',BE);
eps3=subs(eps3,'c',OB);
eps3=subs(eps3,'alpha',pi/4);
plot([0 T1],[eps3 eps3]);
title '\epsilon3=\epsilon3(t)';
xlabel 't, с';
ylabel '\epsilon3, рад/с^2'
% 2.5.8 Графики кинематических величин движения звена 2(ползуна)
figure
subplot(3,1,1);
a=subs(a,'omega1',pi*n1/30);
a=subs(a,'b',BE);
a=subs(a,'c',OB);
a=subs(a,'alpha',pi/4);
ezplot(inline(a-'z'),[0 T1 0 160]);
title 'a=a(t)';
xlabel 't, с';
ylabel 'a, мм';
subplot(3,1,2);
VE2E1=subs(VE2E1,'omega1',pi*n1/30);
VE2E1=subs(VE2E1,'b',BE);
VE2E1=subs(VE2E1,'c',OB);
VE2E1=subs(VE2E1,'alpha',pi/4);
ezplot(inline(VE2E1-'z'),[0 T1 -800 800]);
title 'VE2E1=VE2E1(t)';
xlabel 't, с'
ylabel 'VE2E1, мм/c';
subplot(3,1,3);
WE2E1=subs(WE2E1,'omega1',pi*n1/30);
WE2E1=subs(WE2E1,'b',BE);
WE2E1=subs(WE2E1,'c',OB);
WE2E1=subs(WE2E1,'alpha',pi/4);
ezplot(inline(WE2E1-'z'),[0 T1 -7000 500]);
title 'WE2E1=WE2E1(t)';
xlabel 't, с';
ylabel 'WE2E1, мм/c^2';
% 2.5.9 Звено 2 - ползун, вращается вместе со звеном 3 и, следовательно,
% угловая скорость omega2=omega3 и угловое ускорение eps2=eps3.
% 2.6 Определение кинематических величин для заданного угла положения
% ведущего звена Alpha
% 2.6.1 Задаем угол Alpha в град
% (угол задается в пределах от 0...360 град):
Alpha=45;
disp('Заданный угол положения ведущего звена 1 - угол Alpha, в град --->');
disp(Alpha);
% Находим момент времени t, когда ведущее звено 1 составит с осью x
% угол Alpha
Alpha=Alpha*pi/180;
fx=sym(alpha-Alpha);
r=solve(fx,t);r=0.0978;
disp('Момент времени t в сек --->');
disp(r);
OE=a;
% 2.6.2 Модули скорости и ускорения точки E звена 1
omega1=sym(pi*n1/30)
VE=abs(subs(omega1,t,r)*OE);
WEn=abs((subs(omega1,t,r))^2*OE);
WE=WEn;
disp('Модуль скорости точки E - VE, в мм/с --->'); disp(VE);
disp('Модуль ускорения точки E - WE, в мм/с^2 --->'); disp(WE)
% 2.6.2 Модули скорости и ускорений точки B звена 3 при его
% вращении относительно точки E
BE=sqrt(OE^2+OB^2-2*OE*OB*cos(pi/2+Alpha));
VBE=abs(subs(omega3,t,r))*BE;
WBEn=sym(subs(omega3,t,r))^2*BE;
WBEt=(subs(eps3,t,r))*BE;
disp('Модуль VBE,в мм/с --->'); disp(eval(VBE));
disp('Модуль ускорения WBEn, в мм/с^2 --->'); disp(eval(WBEn));
disp('Модуль ускорения WBEt, в мм/с^2 --->'); disp(eval(WBEt));
% 2.6.3 Угловая скорость и угловое ускорение звена 3
disp('Угловая скорость звена 3 - omega3,в рад/с --->');
disp(eval(subs(omega3,t,r)));
disp('Угловое ускорение звена 3 - epsilon3,в рад/с^2 --->');
disp(eval(subs(eps3,t,r)));
% 2.6.4 Модули скорости и ускорения точки E звена 3
Wc=2*abs(subs(omega1,t,r)*subs(VE2E1,t,r));
VBE=abs(subs(VBE,t,r));
disp('Модуль скорости точки В - VBE,в мм/с --->'); disp(VBE);
disp('Модуль кориолисова ускорения - Wc,в мм/с^2 --->'); disp(Wc);
%
% 3 КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ МЕХАНИЗМА ВЕКТОРНО-ГРАФИЧЕСКИМ МЕТОДОМ.
% МЕТОД ПЛАНОВ СКОРОСТЕЙ И УСКОРЕНИЙ
% (См. раздел 3 ДЗ)
%
% 3.1 План положения механизма
% См. соответствующий чертеж - файл ТехМех_ДЗ_2_ПЛАНЫ_2012_v10.cdw!!!!!
% 3.2 План скоростей
% См. соответствующий чертеж - файл ТехМех_ДЗ_2_ПЛАНЫ_2012_v10.cdw!!!!!!
t=0.3;
% длины отрезков pa, ab и pb в мм
pa=50;ab=50;pb=70.11;
VE2=omega1*a;
% коэффициент масщтаба kv плана скоростей в (мм/(с*мм))
kv=VE2/pa;
% скорости VE3E2 и VE3B3
VE3E2=kv*ab;
VE3B3=kv*pb;
disp(' ПЛАН СКОРОСТЕЙ')
disp('Масштабный коэффициент kv, мм/(с*мм) --->'); disp(kv);
disp('Модуль скорости точки E2 - VE2, в мм/с --->'); disp(kv*pa);
disp('Модуль скорости точки E3E2 - VE3E2, в мм/с --->'); disp(VE3E2);
disp('Модуль скорости точки E3B3 - VE3B3, в мм/с --->'); disp(VE3B3);
disp('Углая скорость звена 3 - Omega3, в рад/с ---> ');disp(VE3B3/BE);
disp('Omega3 направлена ---> против хода часовой стрелки');
% 3.3 План ускорений
% См. соответствующий чертеж - файлТехМех_ДЗ_2_ПЛАНЫ_2012_v10.cdw!!!!!!!!
% длины отрезков qa, ac, cb, be и qb в мм
qa=50;ac=22.8825;cb=27.63;be=0;qb=31.65;
WE2=(omega1)^2*a;
WE3B3n=(omega3)^2*BE;
% коэффициент масщтаба kw плана ускорений в (мм/(с^2*мм))
kw=WE2/qa;
% ускорения WE3B3t и WE3E2
WE3B3t=kw*cb;
WE3E2=kw*be;
disp(' ПЛАН УСКОРЕНИЙ')
disp('Масштабный коэффициент kw, мм/(с^2*мм) --->');disp(kw);
disp('Модуль ускорения точки E2 - WE2, в мм/с^2 --->'); disp(kw*qa);
disp('Модуль ускорения точки E3n - WE3B3n, в мм/с^2 --->'); disp(kw*qb);
disp('Модуль ускорения точки E3t - WE3B3t, в мм/с^2 --->'); disp(WE3B3t);
disp('Модуль кориолисова ускорения - Wс, в мм/с^2 --->'); disp(kw*ac);
disp('Модуль ускорения точки E3E2 - WE3E2, в мм/с^2 --->'); disp(WE3E2);
disp('Угловое ускорение звена 3 - Epsilon3, в рад/с^2 ---> ');
disp(WE3B3t/BE);
disp('Epsilon3 направлена ---> против хода часовой стрелки');
%
% 4 СРАВНЕНИЕ РЕЗУЛЬТАТОВ ДВУХ МЕТОДОВ
% (См. раздел 4 ДЗ)
%
% 4.1 Скорость VE2E1 в мм/с
delta_VE2E1=((abs(VE2E1)-VE3E2)/abs(VE2E1))*100;
% 4.2 Скорость VE в мм/с
delta_VE=((VE-VE2)/VE)*100;
% 4.3 Угловая скорость Omega3 в рад/с
absOmega3=abs(subs(omega3,t,r));
delta_Omega3=((absOmega3-VE3B3/BE)/absOmega3)*100;
% 4.4 Ускорение WBEt в мм/с^2
delta_WBEt=(abs(WE3B3t)-WBEt);
% 4.5 Ускорение WBEn в мм/с^2
delta_WBEn=((abs(WE3B3n)-WBEn)/abs(WE3B3n))*100;
% 4.6 Cкорость VBE в мм/с
delta_VBE=((abs(VE3B3)-VBE)/abs(VE3B3))*100;
% 4.7 Угловое ускорение Epsilon3 в рад/с^2
absEpsilon3=abs(subs(eps3,t,r));
delta_Epsilon3=((WE3B3t/BE-absEpsilon3)/WE3B3t/BE)*100;
% 4.8 Ускорение WEn в мм/с^2
delta_WE=((abs(WE2)-WE)/abs(WE2)*100);
% 4.9 Ускорение WE2E1 в мм/с^2
delta_WE2E1=((abs(WE2E1)-WE3E2)/abs(WE2E1)*100);
disp(' СРАВНЕНИЕ РЕЗУЛЬТАТОВ ДВУХ МЕТОДОВ')
disp('Параметр Аналитика Графика Погрешность');
out1=eval(VE2E1);out2=eval(sym(VE3E2));out3=eval(delta_VE2E1);
disp(['VE2E1,мм/с ',num2str(out1),' ',num2str(out2),...
' ',num2str(out3)]);
out1=eval(VE);out2=eval(sym(VE2));out3=eval(delta_VE);
disp(['VE,мм/с ',...
num2str(out1),' ',num2str(out2),' ',...
num2str(out3)]);
out1=eval(absOmega3);out2=eval(sym(VE3B3/BE));out3=eval(delta_Omega3);
disp(['Omega3,рад/с ',num2str(out1),' ',...
num2str(out2),' ',num2str(out3)]);
out1=eval(WBEt);out2=eval(sym(WE3B3t));out3=eval(delta_WBEt);
disp(['WBEt,мм/с^2 ',num2str(out1),' ',...
num2str(out2),' ',num2str(out3)]);
out1=eval(subs(abs(WE3B3n),t,r));
out2=eval(sym(WBEn));
out3=eval(subs(delta_WBEn,t,r));
disp(['WBEn,мм/с^2 ',num2str(out1),' ',...
num2str(out2),' ',num2str(out3)]);
out1=eval(VBE); out2=eval(VE3B3);
out3=eval(delta_VBE);
disp(['VBE,мм/с ',num2str(out1),' ',...
num2str(out2),' ',num2str(out3)]);
out1=eval(subs(eps3,t,r));out2=eval(sym(WE3B3t/BE));
out3=eval(delta_Epsilon3);
disp(['Epsilon3,рад/с^2 ',num2str(out1),' ',...
num2str(out2),' ',num2str(out3)]);
out1=eval(subs(abs(WE2),t,r));
out2=eval(sym(WE));
out3=eval(subs(delta_WE,t,r));
disp(['WE,мм/с^2 ',num2str(out1),' ',...
num2str(out2),' ',num2str(out3)]);
out1=eval(subs(abs(WE2E1),t,r));
out2=eval(sym(WE3E2));
out3=eval(subs(delta_WE2E1,t,r));
disp(['WE2E1,мм/с^2 ',num2str(out1),' ',...
num2str(out2),' ',num2str(out3)]);
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 490; Нарушение авторских прав?; Мы поможем в написании вашей работы!