КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Машини для збирання плодів
|
|
|
|
Платформа для збирання плодів ПКО-0,7 призначена для збирання плодів у садах з кронами висотою до 6 м. Платформа причіпна. Агрегатують з тракторами класу 1,4. Використовують платформу при ширині міжрядь 8-10 м, і вона працює позиційно. Обслуговують платформу 6-8 працівників. Продуктивність - 0,04 га/год.
Платформу ПОС-0,5 використовують для збирання плодів, обрізування крони дерев у пальметних садах з міжряддями 3,5-5,0 м.
Вона обладнана двома висувними трапами, компресором і комплектом пневматичного інструменту для обрізування крони дерев.
Платформу агрегатують з тракторами класу 1,4. При збиранні плодів платформу обслуговують чотири-шість робітників, а при обрізуванні крони дерев - шість-вісім. Продуктивність платформи при збиранні плодів -500-600 кг/год, а при обрізуванні крони - 25 дерев за годину.
Плодозбиральний комбайн КПУ-2А призначений для збирання плодів кісточкових, насіннячкових та горіхоплідних культур при ширині міжрядь більше 6 м.
Комбайн складається з двох агрегатів на базі самохідного шасі Т-16М.
Основними складальними одиницями агрегатів є вібратор 17 (рис. 13.18), уловлювачі 1, 3 і 6, скатні поверхні 5 і 12, три поперечних уловлюваль-них транспортери 14, поздовжній транспортер 13, полотняна гірка 9, механізми привода транспортерів.

Рис. 13.18. Плодозбиральний комбайн КПУ-2А:
1,3 і 6 — вловлювачі; 2 і 15 — шасі; 4 і 7 — правий та лівий агрегати;5 і 12 - скатні поверхні; 8 - похила частина транспортера; 9 – полотняна гірка; 10 — контейнер; 11 — майданчик; 13 і 14 — транспортери;16 - амортизатори; 17 - вібратор; 18 – ущільнювач
При збиранні плодів комбайн під'їжджає до плодового дерева, розкриває уловлювачі 1, 3 і 6 і включає вібратор 17. Плоди від вібрації відриваються і падають на поверхні уловлювачів і скатні поверхні 5 і 12. Поперечні транспортери 14 подають плоди на поздовжній транспортер 13, який переміщує їх на полотняну гірку. Стрічка похилого транспортера відокремлює листя та інші домішки, а плоди надходять у контейнер.
Продуктивність комбайна - 35-45 дерев за годину. Комбайн обслуговують двоє механізаторів і двоє збирачів плодів.
Плодозбиральна машина ВУМ-15А призначена для збирання плодів кісточкових і яблук. Машина начіпна. Агрегатують із самохідним шасі Т-16М.
Основними складальними одиницями машини є вібратор, транспортер, два уловлювачі (похилі поверхні), вентилятор і механізм привода.
Від вібратора плодове дерево коливається з частотою 1200 об/хв.
Відірвані плоди падають на поверхню уловлювача, а потім транспортером подаються в контейнер.
Продуктивність машини - 120 дерев за годину. Обслуговують машину тракторист і два робітники.
Самохідну плодозбиральну машину МПУ-1А застосовують для збирання кісточкових, насіннячкових та горіхоплідних дерев у садах (рис. 13.19).
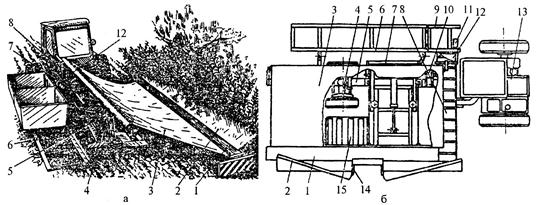
Рис. 13.19. Плодозбиральна машина МПУ-1А: а — вигляд загальний; б — вигляд зверху; 1 - транспортер поздовжній; 2 - уловлювач; 3 - уловлювач начіпний;4 - передній міст; 5 - рама шасі; 6 - місце для контейнерів; 7 - маніпулятор;8 - транспортер поперечний; 9 - вилка розвантаження контейнерів;10 - насосна станція; 11 - копір; 12 - вентилятор; 13 - двигун; 14 - захоплювач струшувача; 15 – екран
Робочим органом машини є інерційний вібратор. Робочий процес машини такий, як і машини ВУМ-І5А. Обслуговують машину троє працівників. Продуктивність - до 60 дерев за годину.
Ягодозбиральні машини КББ-8 і 9ЯМ-200-8 призначені для напівмеха-нізованого збирання смородини та аґрусу.
Машина КББ-8 складається з уловлювачів ягід 9 (рис. 13.20), бункера 6, вентилятора 10, вібраторів 8, генератора 5, двох штанг із розетками, акумуляторної батареї і пульту керування.
Вібратор 8 приводиться в рух від електродвигуна потужністю 0,11 кВт, напругою 36 В. На корпусі вібратора є рукоятка і вимикач струму. Частота коливань вилки вібратора - 37 Гц, а амплітуда - 10 мм.
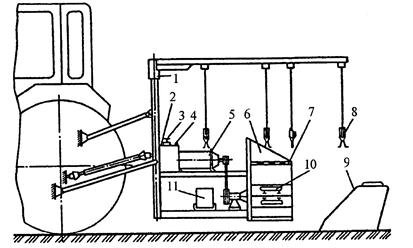
Рис. 13.20. Ягодозбиральна машина КВБ-8:
1 - рама із штангами; 2 — пульт керування; 3 — головний перемикач;4 - вмикач головний; 5 - електрогенератор; 6 - бункер; 7 - решето;8 - ручний електровібратор; 9 - уловлювач; 10 - вентилятор;11 - акумуляторна батарея
Машина працює позиційно. Одночасно збирають ягоди з чотирьох рядів.
Спочатку розміщують уловлювач біля куща. Далі робітник нахиляє гілки і включає вібратор. Від вібрації ягоди відриваються і падають на брезент уловлювача. Потім їх пересипають у бункер. Обслуговують машину тракторист, оператор і вісім робітників-збирачів ягід. Продуктивність машини - до 0,06 га/год.
Ягодозбиральна машина МПЯ-1А призначена для збирання ягід смородини і аґрусу потоковим методом.
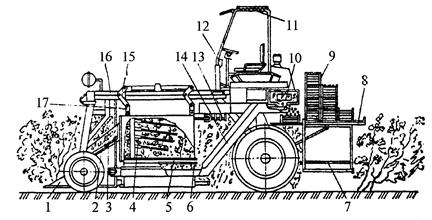
Рис. 13.21. Машина для збирання чорної смородини МПЯ-1А: 1 - подільник; 2 - гідросистема; 3 - розподільник; 4 - активатор; 5 - відбивач ягід; 6 - транспортер поперечний; 7 - місце оператора; 8 - майданчик розвантажувальний; 9 - ящики; 10 - пневмоочистка; 11 — тент; 12 — щиток з органами керування і контрольно-вимірювальними приладами; 13 - привід центральний; 14 - транспортер поздовжній; 15 - підіймальний механізм; 16 - шасі; 17 -рама
Основні складальні одиниці машини: подільники 1 (рис. 13.21), бітер-активатор 4, уловлювач транспортерного типу, поперечний полотняно-планчастий транспортер 6, пневмоочистка 10, транспортер поздовжній 14, підіймальний механізм 15, майданчик розвантажувальний 8, привід центральний 13, шасі 16 і рама 17.
Під час руху агрегату подільники 1 спрямовують гілки в зону дії бітера-активатора 4. Пальці бітера створюють поперечні коливання гілок. Від коливних рухів ягоди відриваються і падають на лотки транспортера-улов-лювача. Далі ягоди поперечним транспортером 6 подаються в ящики.
Робоча швидкість машини - 0,5-2,5 км/год. Продуктивність - 900 кг/год.
Агрегат ВУК-ЗА призначений для навантаження плодів у контейнери в міжряддях саду, ущільнення їх вібрацією, транспортування до місць зберігання або пунктів переробки і вивантаження. Він виготовлений на базі платформи ПТ-3,5.
Агрегат складається з основної рами 2 (рис. 13.22), на якій встановле
на рамкова доріжка, вібромайданчика 13, завантажувача 7, механізмів
підіймання 3 і зсування 4 контейнерів, огородження, задніх упорів 9 з
фіксатором, ходової частини, гідро- і пневмогальмівної систем, поворот
них опорних стояків і причіпного пристрою.
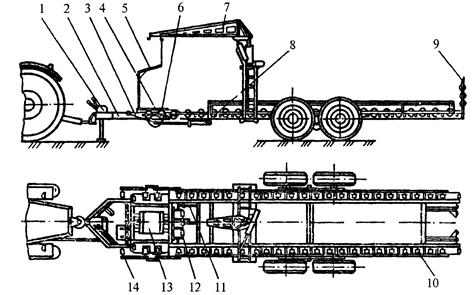
Рис. 13.22. Агрегат ВУК-ЗА:
1 - гідророзподільник; 2 - рама; 3 - механізм підіймання; 4 –механізм зсування; 5 — захоплювач; 6 — вібратор; 7 - завантажувач; 8 - гідроциліндр;9 - упор; 10 - ролики; 11 - гідроциліндр затискного пристрою;12 і 14 - затискні пристрої; 13 – вібромайданчик
Контейнер, завантажений плодами, встановлюють навантажувачем на вібромайданчик 13 для ущільнення продукції протягом 20-30 с, а потім переставляють на накопичувальну платформу. Під час ущільнення вібрацією плоди краще заповнюють місткість контейнера і менше пошкоджуються.
На ВУК-ЗА завантажують 8 контейнерів і перевозять їх до місця переробки. Частота коливання вібромайданчика - 25-35 Гц, амплітуда коливання - 1,5-2,5 мм. Продуктивність агрегата - до 4 т/год. Агрегатують з тракторами класу 1,4 і 2.
Лінії товарної обробки плодів ЛТО-6 і ЛТО-ЗА призначені для товарної обробки яблук, груш, айви та інших плодів.
Лінія ЛТО-6 має випорожнювач контейнерів 1 (рис. 13.23), сепаратор 2, сортувальний 4 і калібрувальний 9 транспортери, стрічковий транспортер 10, пакувальні пристрої 8, рольганги 3 і 7, робочі місця для сортувальників.
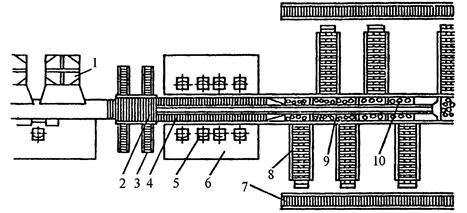
Рис. 13.23. Лінія ЛТО-6:
1 - випорожнювач контейнерів; 2 - сепаратор; 3 - роликовий транспортер нестандартної продукції; 4 - сортувальний транспортер; 5 - стілець;6 - настил; 7 - роликовий транспортер; 8 - пакувальний пристрій;9 - калібрувальний транспортер; 10 - стрічковий транспортер
Випорожнювач 1 (ОКП-6) вивантажує з контейнерів плоди і подає їх транспортером на лінію до сепаратора 2, який відокремлює дрібні плоди. Розміри калібрувальних щілин сепаратора встановлюють у межах 40-50 мм. Із сепаратора 2 плоди потрапляють на сортувальний транспортер 4, з боків якого встановлені приймальні лотки для плодів третього сорту. По цих лотках плоди третього сорту потрапляють на стрічковий транспортер, що розміщений під роликовим транспортером.
Для транспортування відібраних плодів на другу калібрувальну секцію є стрічковий транспортер, що розміщений над сортувальним і над першою секцією калібрувальної машини.
Два потоки плодів, що залишилися на рамковому сортувальному транспортері 4, об'єднуються за допомогою широкого стрічкового транспортера зі звужувальними боковинами і спрямовуються на першу калібрувальну секцію.
Калібрувальний агрегат складається з послідовно розміщених транспортерів 9 у вигляді стрічок з отворами, діаметр яких поступово збільшується по напрямку руху плодів. Під робочими поверхнями транспортерів встановлені вловлювачі типу хвильових транспортерів, робоча поверхня яких приводиться в рух гвинтовими активаторами. Плоди, що падають на активну поверхню вловлювачів, переміщуються до транспортерів-нагромаджувачів 8 хвильового типу. Якщо заслінка закрита, то плоди, коливаючись у вертикальній площині, нагромаджуються на його поверхні. Між нагромаджува-чами встановлені пакувальні столики з похилою поверхнею для ящиків, у які плоди складаються рядами.
Якщо пакування плодів проводиться насипом, використовують каретку з фрикційним механізмом. Перед заповненням ящика плодами каретка піднімається пакувальником, а під дією маси плодів поступово опускається. Режим опускання регулюють фрикційним механізмом. Для встановлення і переміщення порожніх і заповнених плодами ящиків уздовж лінії з обох боків розміщені роликові транспортери 7.
Продуктивність - до 4,1 т/год. Обслуговують лінію оператор і 20 працівників.
Лінія товарної обробки плодів ЛТО-ЗБ використовується з машиною СКЯ-ЗА для сортування, калібрування і пакування плодів та з машиною СКЯ-ЗА-01 для сортування і пакування плодів. До складу лінії входять випорожнювач контейнерів ОКП-6, сепаратор, роликовий сортувальний транспортер, розподільний і стрічковий транспортери, калібрувальні машини, пакувальні столики, роликові конвеєри.
Сепаратор роликовий. Ширина щілин між роликами - 40 мм. Він рівномірно подає плоди на лінію. Дрібні плоди попадають на похиле днище, лоток і спрямовуються в тару.
На роликовому сортувальному транспортері оператори оглядають плоди і розподіляють їх на сортові групи.
До складу лінії входять дві секції, які мають по сім калібрувальних конвеєрів у вигляді стрічок з отворами діаметром 49, 55, 59, 62, 69 і 73 мм. На кожному конвеєрі встановлені лотки-нагромаджувачі. Плоди першого та вищого сортів пакують вручну в ящики.
Продуктивність - до 3,5 т/год. Обслуговують лінію оператор і 14 працівників.
На калібрувальних і сортувальних машинах використовують розмірні і вагові пристрої.
Розмірні робочі органи застосовують у вигляді каскаду конвеєрів із калібрувальними отворами, які збільшуються по напрямку руху (рис. 13.24, а).
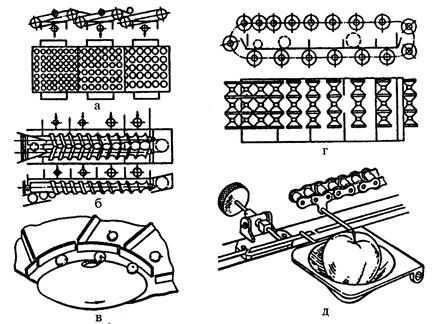
Рис. 13.24. Калібрувальні робочі органи: а - конвеєрні; б - гвинтовий; в - дисковий; г - роликовий; д - ваговий
Робочі органи бувають у вигляді двох гвинтів лівого і правого напрямку (рис. 13.24, б). У цих гвинтах отвори збільшуються із збільшенням кроку гвинта або встановленням їх під кутом. При обертанні гвинтів плоди переміщуються до більшого отвору і випадають вниз.
Дискові робочі органи (рис. 13.24, в) застосовують для калібрування плодів округлої форми.
Ваговий робочий орган складається із пластмасових чашок, закріплених на ланцюгу (рис. 13.24, д). Чашка з плодом перевертається при натисканні важеля на коромисло під дією тягарця.
Випорожнювач контейнерів ОКП-6 стаціонарний, призначений для вивантаження плодів із контейнерів у приймальний бункер або транспортер лінії товарної обробки плодів. Він складається з рами, двох поворотних рамок, низ яких складається з рольгангів, а верх - з рухомих кришок притискачів, скатної дошки, стрічкового транспортера, електро- та гідропривода і пульта керування.
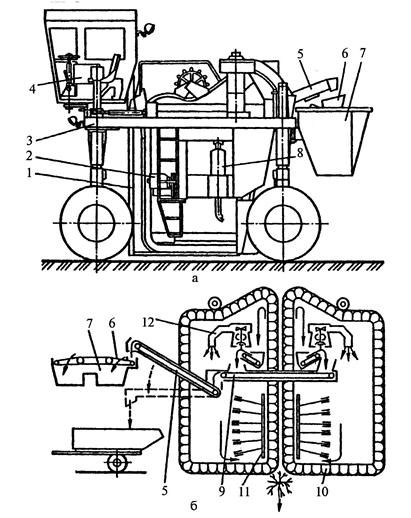
Рис. 13.25. Виноградозбиральний комбайн СВК-ЗМ:
а - вигляд збоку; б — функціональна схема;1 — збиральний модуль; 2 — гідропривід; 3 - рама; 4 — кабіна з органами керування; 5,6, 9 і 10 — поворотний, розподільний, поперечний і ківшовий конвеєри; 7 - бункер; 8 - двигун; 11 - струшувач; 12 - пневмосепаратор
Вилчастим навантажувачем контейнер з плодами встановлюють на рольганг поворотної рамки. Притискна кришка займає верхнє положення. Після цього кришку опускають і повертають рухому рамку гідроциліндром на 135° навколо шарнірно закріпленої осі. Далі поступово відкривають клапан кришки, і плоди вільно переміщуються з контейнера на еластичну скатну дошку, а потім на стрічковий транспортер і лінію товарної обробки. Величиною відкриття клапана кришки і швидкістю руху стрічкового транспортера встановлюють продуктивність лінії.
Продуктивність випорожнювача - до 6,3 т/год.
Комбайн виноградозбиральний СВК-ЗМ самохідний, однорядний призначений для збирання технічних сортів винограду з вертикальних шпалер на рівнинах і схилах до 12° з розміщенням грон від поверхні ґрунту на висоті не менше 0,2 м.
Комбайн (рис. 13.25) складається із самохідного шасі, збирального модуля 1, бункера 7, поворотного транспортера 5 і гідрбсистеми.
Самохідне шасі має раму, двигун Д-240, ходову частину з системою гідроприводу, кабіну з органами керування і приладами контролю, трансмісію, системи стабілізації і електрообладнання. Система стабілізації маятникового типу з гідроприводом механізмів. Вона підтримує раму комбайна в горизонтальному положенні при роботі на схилах.
Збиральний модуль складається з рами 3, струпіувачів 11, ковшових елеваторів 10, системи пневмосепарації 12, поперечного 9 і поворотного 5 транспортерів і механізмів приводу.
Під час руху комбайна вздовж ряду шпалер била струшувачів 11 відокремлюють плоди від кущів винограду, і вони попадають у ковшові елеватори 10, які розміщені симетрично з обидвох боків.
Пневмосепаратори 12 очищають виноград від листя та інших рослинних домішок. Поперечним транспортером 9 плоди переміщуються на поворотний транспортер 5, який спрямовує виноград у бункер 7 комбайна або в транспортний засіб. Місткість бункера -1,8 м3.
Робоча швидкість комбайна - до 5 км/год, продуктивність - 0,6 га/год. Потужність двигуна - 55 кВт.
Комбайн КВР-1 самохідний призначений для збирання технічних сортів винограду.
Комбайн складається з самохідного шасі і двох секцій робочих органів. Секції мають (рис. 13.26) струшувачі 7, уловлювачі 2 і 6, транспортери 1, вентилятори 4 і бункери 5.
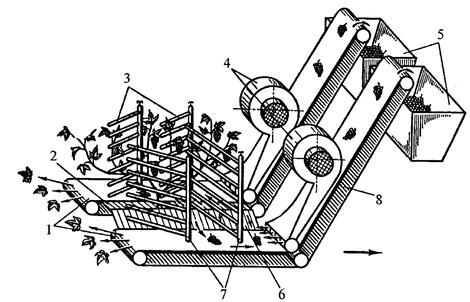
Рис. 13.26. Функціональна схема виноградозбирального комбайна КВР-1:
1 - горизонтальні стрічки транспортера; 2 і 6 - уловлювачі; З - стержні;4 - вентилятори; 5 - бункери; 7 - струшувачі; 8 - похилі стрічки транспортера
Під час руху комбайна стержні 3 струшувачів 7 приводяться в коливальний рух і вдаряють по кущах винограду. Від удару ягоди відокремлюються і падають на поверхню уловлювачів. Далі плоди транспортерами 1 подаються в бункери 5. Одночасно вентилятори 4 подають повітряний потік, який видуває листя та інші рослинні домішки.
Для збирання сортів винограду, ягоди яких важко відокремлюються, комбайн переобладнують. Замість струшувача пруткового типу на комбайні встановлюють барабанний з маятниковою підвіскою. Барабанний струшувач складається з двох вертикальних барабанів, напрямних пристроїв та барабанів пруткового типу, які гасять коливання шпалери за робочою зоною.
Робоча швидкість комбайна - до 2,2 км/год. Продуктивність - 0,36 га/год.
Комбайн КВ-0,57 ("Крим") забезпечує збирання технічних сортів винограду методом вібрації.
На рамі самохідного шасі СІП-28 встановлені струшувачі, транспортери з вловлювачами стрічкового типу, вентилятори, бункер-нагромаджу-вач і гідросистема.
Транспортери приєднані до рами шарнірно. Вони автоматично копіюють ряд шпалер винограду при відхиленні комбайна. Струшувачі бильного типу з маятниковою підвіскою і механізмами приводу.
Місткість бункера - 0,5 м3. Ширина захвату - 2; 3 і 4 м. Продуктивність комбайна - 0,57 га/год. Робоча швидкість - 1,5 і 1,68 км/год.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 3689; Нарушение авторских прав?; Мы поможем в написании вашей работы!