КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Потери и КПД асинхронного двигателя
|
|
|
|
Преобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2 всегда меньше мощности на входе (потребляемой мощности) Р1 на величину потерь  Р:
Р:
Р2 = Р1 - Р (13.1)
Потери Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери Рм в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания Рм = f β,
где β = 1,3 ÷ 1,5. Частота перемагничивания сердечника статора равна частоте тока в сети (f = f1), а частота перемагничивания сердечника ротора f = f 2 = f 1s.При частоте тока в сети f 1 = 50 Гц при номинальном скольжении sном = 1 ÷ 8 % частота перемагничивания ротора f = f 2 = 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
Рэ1 = m1 I21 r1; (13.2)
электрические потери в обмотке ротора
Рэ2 = m2 I22 r2 = m1 I′ 21 r′ 1 (13.3)
Здесь r1 и r2 — активные сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру Θраб (см. § 8.4):
r1 = r1.20 [1 + α (Θраб - 20)]; r2 = r2.20 [1 + α (Θра6 - 20)], (13.4)
где r1.20 и r2.20 — активные сопротивления обмоток при температуре Θ1 = 20 °С; α — температурный коэффициент, для меди и алюминия α = 0,004.
Электрические потери в роторе прямо пропорциональны скольжению:
Рэ2 = s Рэм (13.5)
где Рэм — электромагнитная мощность асинхронного двигателя, Вт:
Рэм = Р1 = (Рм + Рэ1) (13-6)
Из (13.5) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрическиe потери в щеточном контакте Рэ.щ = 3 I2 ΔUщ /2, где Uщ =2,2 В - переходное падение напряжения на пару щеток.
Механические потери Рмех — это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора (Рмех = n22). В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5% от подводимой к двигателю мощности Р1:
Рдо6 = 0,005 Р1. (13.7)
При расчете добавочных потерь для неноминального режима следует пользоваться выражением
Р′доб = Рдоб β2 (13-8)
где β = I1/ I1ном —коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб. (13.9)
На рис. 13.1 представлена энергетическая диаграмма асинхронного двигателя, из которой видно, что часть подводимой к двигателю мощности Р1 = m1 U1 I1 cos φ1 затрачивается в статоре на магнитные Ры и электрические Рэ1 потери. Оставшаяся после этого электромагнитная мощность Рэм [см. (13.6)] передается на ротор, где частично расходуется на электрические потери Рэ2 и преобразуется в полную механическую мощность Р′2. Часть мощности идет на покрытие механических Рмех и добавочных потерь Рдоб, а оставшаяся часть этой мощности Р2 составляет полезную мощность двигателя.
У асинхронного двигателя КПД
η = Р2/ Р1 =1 - P. (13.10)
Электрические потери в обмотках РЭ1 и РЭ2 являются переменными потерями, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора [см. (13.2) и (13.3)]. Переменными являются также и добавочные потери (13.8). Что же касается магнитных Рм и механических Рмех, то они практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
Коэффициент полезного действия асинхронного двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке (0,7 ÷ 0,8)Рном. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2 > Рном) он резко убывает, что объясняется интенсивным ростом переменных потерь (Рэ1 + Рэ2 + Рдоб), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности. График зависимости КПД от нагрузки η = f (β) для асинхронных двигателей имеет вид, аналогичный представленному на рис. 1.41 (см. рис. 13.7).
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном = 75 ÷ 88%, для двигателей мощностью более 10 кВт ηном =90 ÷ 94%.
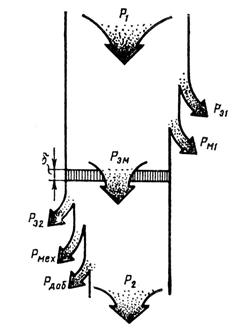
Рис. 13.1. Энергетическая диаграмма асинхронного двигателя
Пример 13.1. Трехфазный асинхронный двигатель работает от сети напряжением 660 В при соединении обмоток статора звездой. При номинальной нагрузке он потребляет из сети мощность Р1 = 16,7 кВт при коэффициенте мощности cos φ1 = 0,87. Частота ηвращения nном = 1470 об/мин. Требуется определилить КПД двигателя η hоm, если магнитные потери Рм = 265 Вт, а механические потери Рмех = 123 Вт. Активное сопротивление фазы обмотки статора r1.20 = 0,8 Ом, и класс нагревостойкости изоляции двигателя F (рабочая температура Θра6 =115 °С).
Решение. Ток в фазе обмотки статора
I1ном =  =
=  =16,8 А
=16,8 А
где U1 = 660/  = 380 В.
= 380 В.
Сопротивление фазы обмотки статора, пересчитанное на рабочую температуру
Θраб = 115 ˚С, по (13.4)
r1 = r1.20 [1 + α (Θраб - 20)] = 0,8[1 + 0,004(115 - 20)] = 1,1 Ом.
Электрические потери в обмотке статора по (13.2)
Рэ1 = m1 I21ном r1 = 3 • 16,82 • 1,1 = 93 1 Вт.
Электромагнитная мощность двигателя по (13.6)
РЭМ = Р1 - (Рм + Рэ1) = 16,7 • 103 - (265 + 931) = 15504 Вт.
Номинальное скольжение sном = (n1 – nном)/ n1 = (1500 - 1470)/1500 = 0,020. Электрические потери в обмотке ротора по (13.5)
Рэ2 =sном Рэм = 0,020 • 15504 = 310 Вт.
Добавочные потери по (13.7)
Рдо6 = 0,005 Р1 =0,005 • 16,7 • 103 =83 Вт.
Суммарные потери по (13.9)
Р = Рм + Рэ1 + Рэ2 + Рмех + Рмех = 265 + 931 + 310 + 123 + 83 = 1712 Вт.
КПД двигателя в номинальном режиме по (13.10)
ηном = 1 - Р/ Р1 = 1 - 1712/ (16,7 • 103) = 0,898, или 89,8%.
Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим его энергетические свойства — экономичность в процессе эксплуатации. Кроме того, КПД двигателя, а точнее величина потерь в нем, регламентирует температуру нагрева его основных частей и в первую очередь его обмотки статора. По этой причине двигатели с низким КПД (при одинаковых условиях охлаждения) работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности (см. § 8.4).
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 1546; Нарушение авторских прав?; Мы поможем в написании вашей работы!