КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 3
|
|
|
|
системы ЖРДУ ракет-носителей
В данной лекции рассматриваются назначение, упрощенные схемы и особенности систем, обеспечивающих функционирование ЖРДУ ракет-носителей. В конце лекции излагаются специальные требования, предъявляемые к системам ЖРДУ и вопросы для проверки усвоения студентами изложенного материала.
Рассматриваются кратко системы ЖРДУ:
1. Топливопитания
2. Заправки и слива
3. Термостатирования компонентов топлива
4 Барботирования компонентов топлива
5. Циркуляции
6. Захолаживания двигателя
7. Продувки двигателя
8. Регулирования соотношения компонентов топлива
9. Синхронного опорожнения баков
10. Наддува и дренажа баков
11. Аварийной защиты
12. Автоматического регулирования тяги
Несмотря на обилие рассматриваемых систем ЖРДУ автор считает, что целостное представление о них можно добиться только в результате их комплексного изучения, особенно на начальном этапе.
Перед началом лекции студентам должен быть роздан материал с рисунками – копиями слайдов презентаций.
1 Система управления ракеты-носителя с ЖРДУ
В системе управления ракет-носителей (РН) жидкостная ракетная двигательная установка (ЖРДУ) является исполнительным элементом. Управление ракетой может осуществляться поворотом двигателей по двум осям или рассогласованием тяг в многокамерной двигательной установке. Во втором случае необходимо изменять тяги двигателей по сигналам системы управления ракеты.
Рис. 1. - Функциональная схема системы управления ракеты с рассогласованием тяг двигателей:  – скорость полета ракеты;
– скорость полета ракеты;  – угол крена, тангажа и рыскания ракеты;
– угол крена, тангажа и рыскания ракеты;  – давления на входе в регулятор и на его выходе; ПСРУ – программное счетно-решающее устройство; ЭПР – электропривод дроссельного крана регулятора тяги (давления в камере сгорания);
– давления на входе в регулятор и на его выходе; ПСРУ – программное счетно-решающее устройство; ЭПР – электропривод дроссельного крана регулятора тяги (давления в камере сгорания);  ,
,  ,
,  ,
,  – давления в камерах сгорания четырех двигателей;
– давления в камерах сгорания четырех двигателей;  – расход горючего в окислительный, двухкомпонентный газогенератор первого двигателя;
– расход горючего в окислительный, двухкомпонентный газогенератор первого двигателя;  – угол поворота привода дроссельного крана регулятора; 1 – ракета-носитель; 2 – датчик положения ракеты в пространстве; 3 – датчик скорости полета ракеты
– угол поворота привода дроссельного крана регулятора; 1 – ракета-носитель; 2 – датчик положения ракеты в пространстве; 3 – датчик скорости полета ракеты
Управление ракетой осуществляется по углам крена, тангажа и рыскания, а также кажущейся скоростью полета. По угловым датчикам определяется фактическое положение ракеты в околоземном пространстве и эти команды поступают в программное счетно-решающее устройство (ПСРУ), в котором они сравниваются с требуемыми по программе значениями углов  . По разнице программных и фактических значений этих углов формируется команда на изменение тяги двигателей. Усиленный сигнал с ПСРУ на изменение тяги двигателя поступает к электроприводу дросселя регулятора расхода топлива. Перенастройка площади дроссельного крана регулятора приводит к изменению расхода подмешиваемого в газогенератор компонента топлива, что приводит к изменению температуры газа на выходе из газогенератора, к изменению мощности турбины, частоты вращения ротора ТНА и, как следствие, к изменению расхода основных компонентов в камеру сгорания и тяги двигателя.
. По разнице программных и фактических значений этих углов формируется команда на изменение тяги двигателей. Усиленный сигнал с ПСРУ на изменение тяги двигателя поступает к электроприводу дросселя регулятора расхода топлива. Перенастройка площади дроссельного крана регулятора приводит к изменению расхода подмешиваемого в газогенератор компонента топлива, что приводит к изменению температуры газа на выходе из газогенератора, к изменению мощности турбины, частоты вращения ротора ТНА и, как следствие, к изменению расхода основных компонентов в камеру сгорания и тяги двигателя.
Так как ракета как объект управления является более инерционной, по сравнению с двигателями, то сигналы о тягах двигателей (давлениях  в камерах сгорания) поступают в ПСРУ для упреждающего изменения углов
в камерах сгорания) поступают в ПСРУ для упреждающего изменения углов  сверх допустимой нормы. Таким образом, по сигналу с ПСРУ двигатель настраивается на определенную тягу, и эта операция выполняется в результате изменения настройки регулятора тяги.
сверх допустимой нормы. Таким образом, по сигналу с ПСРУ двигатель настраивается на определенную тягу, и эта операция выполняется в результате изменения настройки регулятора тяги.
Движение ракеты на активном участке траектории определяется равнодействующей трех сил: тяги двигателей P, сил аэродинамического сопротивления X и силы тяжести  . Для осуществления различных маневров на траектории, например программных разворотов, компенсации возможных отклонений от расчетной траектории, необходимо изменять равнодействующую этих сил. Поскольку применение аэродинамических сил хотя и возможно, путем поворота воздушных рулей, но малоэффективно, а изменение силы тяжести невозможно, то управлять полетом ракеты можно только изменяя величину и направление вектора тяги двигателей.
. Для осуществления различных маневров на траектории, например программных разворотов, компенсации возможных отклонений от расчетной траектории, необходимо изменять равнодействующую этих сил. Поскольку применение аэродинамических сил хотя и возможно, путем поворота воздушных рулей, но малоэффективно, а изменение силы тяжести невозможно, то управлять полетом ракеты можно только изменяя величину и направление вектора тяги двигателей.
 Система управления ракетой в общем случае состоит из системы наведения, системы угловой стабилизации. Система наведения управляет движением центра массы ракеты на активном участке траектории, т.е. управляет тремя составляющими скорости: продольной, боковой и нормальной. Соответственно система наведения состоит из трех каналов: канал регулирования кажущейся продольной скорости (система РКС), каналы боковой и нормальной стабилизации. Датчиками системы наведения служат акселерометры, установленные на гидростабилизированной платформе ракеты.
Система управления ракетой в общем случае состоит из системы наведения, системы угловой стабилизации. Система наведения управляет движением центра массы ракеты на активном участке траектории, т.е. управляет тремя составляющими скорости: продольной, боковой и нормальной. Соответственно система наведения состоит из трех каналов: канал регулирования кажущейся продольной скорости (система РКС), каналы боковой и нормальной стабилизации. Датчиками системы наведения служат акселерометры, установленные на гидростабилизированной платформе ракеты.
Акселерометр измеряет кажущееся ускорение, т.е. ускорение ракеты, находящейся в поле сил тяготения, а после интегрирования ускорения определяется кажущаяся скорость, которая сравнивается с программным значением.
Система регулирования кажущейся продольной скоростью ракеты (РКС)
Акселерометр измеряет кажущееся ускорение, т.е. ускорение ракеты, находящейся в поле сил тяготения, а после интегрирования ускорения определяется кажущаяся скорость, которая сравнивается с программным значением. РКС обеспечивает получение в конце активного участка траектории заданного значения продольной кажущейся скорости. Это достигается изменением скорости согласно программе полета, тем самым гарантируется точность выполнения баллистической задачи вывода на заданную орбиту или попадания в цель.
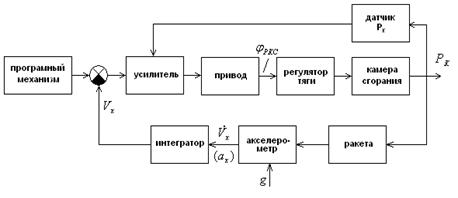
Рис. 2. Структурная схема системы РКС
Основные возмущения, действующие на систему РКС:
· отклонения секундных расходов топлива, величины удельной тяги, массы ракеты, из-за температурных колебаний окружающей среды;
· ошибки в настройке двигательной установки;
· отклонение тяги двигателя  из-за работы регулятора системы СОБ;
из-за работы регулятора системы СОБ;
· разброс импульса последействия тяги первых ступеней;
· разброс лобового сопротивления ракеты из-за действия продольной составляющей ветра.
Каналы боковой и нормальной стабилизации
обеспечивают полет по заданной траектории за счет поддержания нулевых значений боковой и нормальной скоростей.
Система угловой стабилизации
управляет движением ракеты вокруг центра массы. Управление осуществляется раздельно в каждой из трех плоскостей – тангажа, рысканья и крена. Автомат стабилизации обеспечивает неизменность направления вектора продольной скорости ракеты и угла крена, а также изменения этих величин в соответствии с заданной программой.
Вид программ изменения угла тангажа и крена (задается или как функция времени, или как функция кажущейся скорости). По каналу рыскания программой обычно задается нулевой угол.
Чувствительными органами автомата стабилизации являются контрольно-измерительные датчики гироскопических приборов. Полученные сигналы рассогласования после усиления поступают на исполнительные органы (рулевые машины). Для обработки сигналов рассогласования, поступающих от гироскопов, датчиков угловых скоростей (ДУС), датчиков ускорений и т.д., могут использоваться бортовыми ЦВМ.
Для стабилизации ракеты на активном участке требуются значительные по величине управляющие силы и моменты, т.к. момент инерции ракеты, особенно в плоскостях тангажа и рыскания, может быть весьма значителен. Стабилизация может осуществляться с помощью газоструйных и воздушных рулей, вспомогательных двигателей, поворотных сопел, поворотом маршевых двигателей и т.п. Пример применения газоструйных и воздушных рулей – ракета «ФАУ-2», при этом надо отметить, что двигатель этой ракеты из 25 тонн тяги около 600 кгс терял на газоструйных рулях. Это очень много. Поэтому, сейчас газоструйные рули применяются лишь на некоторых боевых ракетах тактического назначения. Обычно они используются вместе с воздушными рулями, располагаемыми на стабилизаторах. Ясно, что при выходе из плотных слоев атмосферы воздушные рули полностью теряют свою эффективность.
Пример применения рулевых двигателей, работающих на основных компонентах топлива – ракета-носитель «Восток». Рулевые сопла могут действовать на газогенераторном газе. При двигательной установке с одним двигателем он может устанавливаться на карданной подвеске, что позволяет изменять направление тяги в двух плоскостях. Если ДУ состоит из нескольких двигателей, то двигатель достаточно поворачивать только в одной плоскости (недостаток – большие габариты и масса системы подвески).
Наиболее оптимальным является способ управления вектором тяги путем рассогласования тяг отдельных двигателей многодвигательной установки.
|
|
|
|
|
Дата добавления: 2014-12-23; Просмотров: 3683; Нарушение авторских прав?; Мы поможем в написании вашей работы!