КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример 6.3
|
|
|
|
Плоское прямолинейное движение звеньев
В качестве первого примера возьмём диск радиуса r, катящийся по плоской поверхности под действием внешней силы T, приложенной к центру диска (рис. 6.20).
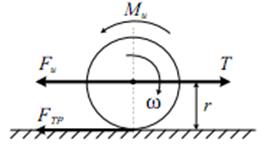
Рис. 6.20
Под действием силы T тело вращается по часовой стрелке со скоростью ω. Силами сопротивления здесь являются инерционная сила F и и сила трения FТР. Составим уравнение равновесия указанных выше сил:
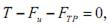 (6.7)
(6.7)
и уравнение действующих на тело моментов:
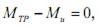 (6.8)
(6.8)
где  .
.
Уравнения (6.7-6.8) служат основой для построения эквивалентной электрической схемы (рис. 6.21). Эта схема строится в два этапа. Вначале следует вычертить нижний контур, в котором напряжения и э.д.с. должны соответствовать уравнению равновесия сил (6.7). На втором этапе чертим верхний контур, отвечающий
уравнению равновесия моментов (6.8). Заметим, что в уравнении (6.8) момент трения MTP определяется в виде произведения силы трения FTP на радиус r. Чтобы выполнить операцию умножения, в электрическую схему введен трансформатор с коэффициентом трансформации r.
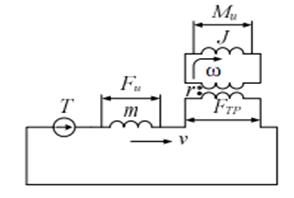
Рис. 6.21
Уравнения трансформатора включают соотношения для напряжений, токов и скоростей изменений токов:

Далее приступаем к построению сети связей физических величин. Для этого в уравнении (6.7) выносим вправо инерционную составляющую Fu (см. па-раф 6.2). Сеть связей состоит из шести ветвей (рис.6.22).

Рис.6.22
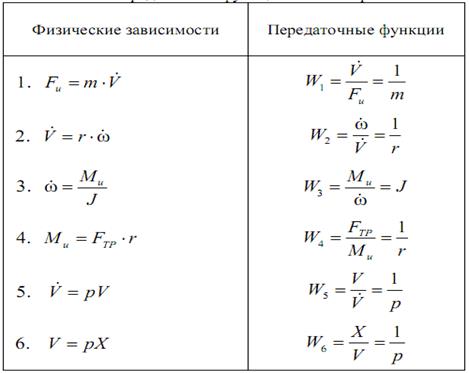
С помощью сети связей определяем передаточные функции элементарных звеньев (табл. 6.6).
Таблица 6.6
Передаточные функции элементарных звеньев
Дальнейший переход от сети связей к структурной схеме динамической системы осуществляется так же, как в предыдущем примере.
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 511; Нарушение авторских прав?; Мы поможем в написании вашей работы!