КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Способы загрузки и разгрузки
|
|
|
|
Загрузка люлечных элеваторов производится на восходящей ветви, разгрузка – в любом месте нисходящей ветви. Ручная загрузка производится непосредственно установкой грузов на движущиеся люльки и разгрузка обеспечивается направляющими, стабилизирующими положение люльки в зоне загрузки.
Для автоматической загрузки и разгрузки люлек применяются выдвижные и поворотные колосниковые и роликовые столы. Загрузка и разгрузка полочных элеваторов производится автоматически или вручную. Наиболее удобными для автоматизации загрузки и разгрузки являются грузы цилиндрической формы, т. к. их можно перекатывать по наклонному настилу или перегружать с колосникового стола на гребенчатую полку, а затем на стол.
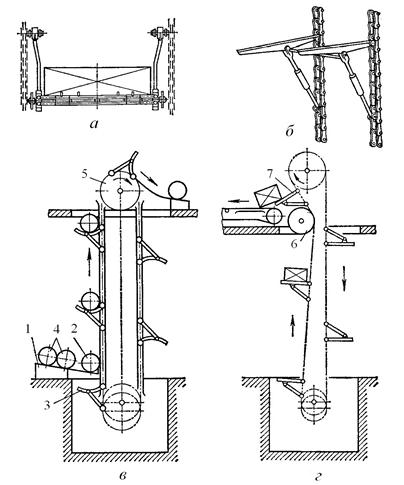
Рис. 5.10. Конструкция люльки (а) и полки (б);
схемы (в, г) загрузки и разгрузки полочных элеваторов:
1 – скаты; 2, 4 – бочки;3 – захват; 5 – головная звездочка;
6 – отклоняющая звездочка; 7 – полка
Используется разгрузка на восходящей ветви (рис. 5.50, г) путем отклонения полки с помощью дополнительных отклоняющих звездочек.
Захваты-полки могут снабжаться специальным поворотным приспособлением, позволяющим разгружать груз в любом месте на восходящей ветви элеватора и управляемым с помощью упоров или направляющих шин, выдвигаемых в месте разгрузки. Поворотные части захватов после разгрузки возвращаются в исходное положение с помощью пружин или направляющих шин.
5.2.3 Особенности расчета люлечных и полочных элеваторов [1, 2]
Производительность
Z = 3600 v zе / а, (5.22)
где zе – число штучных грузов на одном несущем элементе;
а – шаг несущих элементов.
Мощность привода
Р = k з P в / η 0, (5.23)
где k з= 1,05 – коэффициент запаса мощности;
Р в – мощность на валу приводного элемента;
η 0 – кпд передаточного механизма.
Тяговое усилие
W 0 = P в / v. (5.24)
Максимальное натяжение цепи
S max = W 0 + S min + W н.в., (5.25)
где W н.в. – сила сопротивления нисходящей ветви.
W н.в = q 0 H (sinβ – ω cosβ), (5.26)
где q 0 – распределенная масса ходовой части.
Разрывное усилие цепи
Р р = S расч n к c н / z к, (5.27)
где n к= 7–10 – запас прочности цепи;
c н= 1,1–1,25 – коэффициент неравномерности распределения нагрузки между параллельными ветвями цепи;
z к – число параллельных ветвей цепи.
По максимальному натяжению производится выбор цепи, определение передаточного числа и выбор редуктора, расчет тормозного момента и выбор тормоза.
Тяговый расчет выполняется методом обхода по контуру трассы. Натяжение цепи в точке набегания цепи на натяжную звездочку принимают S min = 1000 – 2000 Н. Максимальное натяжение цепей в точке набегания на приводные звездочки S max = S нб.
Контрольные вопросы
1. Общее устройство, классификация, назначение и области применения элеваторов.
2. Преимущества и недостатки ковшовых элеваторов.
3. Основные элементы и основные параметры ковшовых элеваторов.
4. Тяговые органы ковшовых элеваторов. Чем определяется выбор тягового элемента?
5. Типы и назначение ковшей ковшовых элеваторов, способы установки и крепления ковшей.
6. Способы загрузки и разгрузки ковшовых элеваторов.
7. Определение полюсного расстояния. От чего зависит полюсное расстояние?
8. Алгоритм расчета ковшового элеватора.
9. Назначение, общее устройство и конструктивные особенности люлечных и полочных элеваторов.
10. Способы загрузки и разгрузки люлечных и полочных элеваторов.
11. Основы выполнения расчета люлечных и полочных элеваторов.
|
|
|
|
|
Дата добавления: 2015-03-29; Просмотров: 732; Нарушение авторских прав?; Мы поможем в написании вашей работы!