КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методические указания. Порядок выполнения работы
|
|
|
|
Порядок выполнения работы
Кинематических схем механизмов
ИзучениЕ принципов построения
Лабораторная работа 1
Цель работы: изучить принципы построения кинематических схем механизмов и методы классификации элементов механизмов.
Предварительная подготовка: ознакомиться с правилами построения кинематических схем механизмов, изучить назначение различных механизмов, виды механизмов [1, с. 3 – 18; 2].
1. Изучить принцип работы каждого механизма, указанного в задании.
2. Выделить ведомое и ведущее звено механизма.
3. Разбить механизм на звенья.
4. Определить характер движения ведущего и ведомого звена.
5. Выделить кинематические пары.
6. Классифицировать каждое звено по характеру движения. Результаты занести в таблицу.
7. Изобразить принципиальную кинематическую схему механизма.
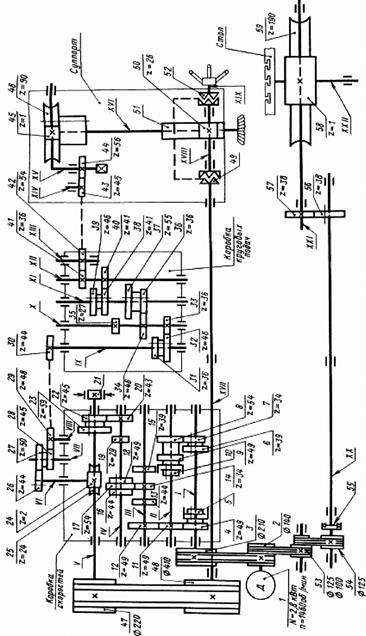
На принципиальной схеме изделия должна быть представлена вся совокупность кинематических элементов и их соединений, предназначенных для осуществления, регулирования, управления и контроля заданных движений исполнительных органов; должны быть отражены кинематические связи (механические и немеханические), предусмотренные внутри исполнительных органов, между отдельными парами, цепями и группами, а также связи с источником движения.
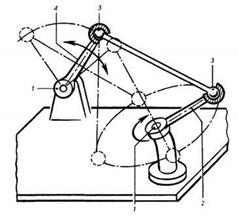
Принципиальную схему изделия вычерчивают, как правило, в виде развёртки (рис. 1).
Все элементы на схеме изображают условными графическими обозначениями или упрощённо в виде контурных очертаний.
Механизмы, отдельно собираемые и самостоятельно регулируемые, допускается изображать на принципиальной схеме изделия без внутренних связей.
Схему каждого такого механизма изображают в виде выносного элемента на общей принципиальной схеме изделия, в которое входит

механизм, или выполняют отдельным документом, при этом на схеме изделия помещают ссылку на этот документ.
Если в состав изделия входит несколько одинаковых механизмов, допускается выполнять принципиальную схему для одного из них в соответствии с вышеуказанными требованиями, а другие механизмы изображать упрощённо.
Взаимное расположение элементов на кинематической схеме должно соответствовать исходному, среднему или рабочему положению исполнительных органов изделия (механизма).
Допускается пояснять надписью положение исполнительных органов, для которых вычерчена схема.
Если элемент при работе изделия меняет свое положение, то на схеме допускается показывать его крайние положения тонкими штрих-пунктирными линиями.
На кинематической схеме, не нарушая ясности схемы, допускается:
а) переносить элементы вверх или вниз от их истинного положения, выносить их за контур изделия, не меняя положения;
б) поворачивать элементы в положения, наиболее удобные для изображения.
В этих случаях сопряжённые звенья пары, вычерченные раздельно, соединяют штриховой линией.
Если валы или оси при изображении на схеме пересекаются, то линии, изображающие их, в местах пересечения не разрывают. Если на схеме валы или оси закрыты другими элементами или частями механизма, то их изображают как невидимые.
Допускается валы условно поворачивать так, как это показано
на рис. 2.
 Соотношение размеров условных графических обозначений взаимодействующих элементов на схеме должно примерно соответствовать действительному соотношению размеров этих элементов в изделии.
Соотношение размеров условных графических обозначений взаимодействующих элементов на схеме должно примерно соответствовать действительному соотношению размеров этих элементов в изделии.
На принципиальных схемах изображают:
· валы, оси, стержни, шатуны, кривошипы и т.п. – сплошными основными линиями толщиной s;
· элементы, изображённые упрощённо в виде контурных очертаний, зубчатые колёса, червяки, звёздочки, шкивы, кулачки и т.п. – сплошными линиями толщиной s /2;
· контур изделия, в который вписана схема, – сплошными тонкими линиями толщиной s /3;
· кинематические связи между сопряжёнными звеньями пары, вычерченными раздельно, – штриховыми линиями толщиной s /2;
· кинематические связи между элементами или между ними и источником движения через немеханические (энергетические) участки – двойными штриховыми линиями толщиной s /2;
· расчётные связи между элементами – тройными штриховыми линиями толщиной s /2.
На принципиальной схеме изделия указывают:
а) наименование каждой кинематической группы элементов, учитывая её основное функциональное назначение (например, привод подачи), которое наносят на полке линии-выноски, проведённой от соответствующей группы;
б) основные характеристики и параметры кинематических элементов, определяющие исполнительные движения рабочих органов изделия или его составных частей.
Примерный перечень основных характеристик и параметров кинематических элементов приведён в табл. 2.
Если принципиальная схема изделия содержит элементы, параметры которых уточняют при регулировании подбором, то на схеме эти параметры указывают на основе расчётных данных и делают надпись: «Параметры подбирают при регулировании».
Если принципиальная схема содержит отсчётные, делительные и другие точные механизмы и пары, то на схеме указывают данные об их кинематической точности: степень точности передачи, величины допускаемых относительных перемещений, поворотов, величины допускаемых мёртвых ходов между основными ведущими и исполнительными элементами и т.п.
На принципиальной схеме допускается указывать:
а) предельные величины чисел оборотов валов кинематических целей;
б) справочные и расчётные данные (в виде графиков, диаграмм, таблиц), представляющие последовательность процессов по времени и поясняющие связи между отдельными элементами.
Если принципиальная схема служит для динамического анализа, то на ней указывают необходимые размеры и характеристики элементов, а также наибольшие величины нагрузок основных ведущих
элементов.
На такой схеме показывают опоры валов и осей с учётом их функционального назначения.
В остальных случаях опоры валов и осей допускается изображать общими условными графическими обозначениями.
Каждому кинематическому элементу, изображённому на схеме, как правило, присваивают порядковый номер, начиная от источника движения, или буквенно-цифровые позиционные обозначения (табл. 1). Валы допускается нумеровать римскими цифрами, остальные элементы нумеруют только арабскими цифрами.
Элементы покупных или заимствованных механизмов (например, редукторов, вариаторов) не нумеруют, а порядковый номер присваивают всему механизму в целом.
Порядковый номер элемента проставляют на полке линии-выноски. Под полкой линии-выноски указывают основные характеристики и параметры кинематического элемента.
1. Буквенные коды наиболее распространённых групп элементов
| Буквенный код | Группа элементов механизмов | Примеры элементов |
| А | Механизм (общее обозначение) | |
| В | Валы | |
| С | Элементы кулачковых механизмов | Кулачок Толкатель |
| Е | Разные элементы | |
| Н | Элементы механизмов с гибкими звеньями | Ремень |
| Цепь | ||
| К | Элементы рычажных механизмов | Коромысло |
| Кривошип | ||
| Кулиса | ||
| Шатун | ||
| М | Источник движения | Двигатель |
| Р | Элементы мальтийских и храповых механизмов | |
| Т | Элементы зубчатых и фрикционных механизмов | Зубчатое колесо Зубчатый сектор |
| Червяк | ||
| Х | Муфты, тормоза | |
| У |
Сменные кинематические элементы групп настройки обозначают на схеме строчными буквами латинского алфавита и указывают в таблице характеристики для всего набора сменных элементов. Таким элементам порядковые номера не присваивают.
Чтобы разобраться в устройстве механизма, следует обратить внимание не на отдельно взятые звенья, а на характер их соединения. Подвижное соединение двух звеньев в механизмах называется кинематической парой. При этом следует интересоваться лишь кинематическими возможностями пар (т.е. возможностью звеньев совершать определённые движения) и не принимать во внимание конструктивные особенности.
В кинематических парах звенья могут получать относительное, вращательное, поступательное или сложное движение. Соответственно и различают вращательные, поступательные и пары сложного движения. Например, зубчатые колеса образуют вращательную пару, ползун и направляющие устройства – поступательную пару, винт и гайка – пару сложного движения или винтовую пару (табл. 2).
Соединения кинематических пар, в свою очередь, образуют кинематическую цепь. Для изображения механизмов и их составных частей – звеньев и кинематических пар – пользуются стандартными условными обозначениями. Неподвижность звеньев в парах всех видов отмечается на схемах подштриховкой.
По структурно-конструктивным признакам различают механизмы плоские, у которых точки звеньев описывают траектории, лежащие в параллельных плоскостях, и пространственные, которые осуществляют взаимодействие между звеньями, расположенными в различных плоскостях.
Таблица 2
| Кинематическая схема звена | Название | Назначение |
| Шатун | Стержни, шарнирно соединённые с двумя или более подвижными звеньями и совершающие сложное движение в плоскости (или в пространстве) |

| Рычаг | Жёсткие стержни с двумя и более отверстиями для шарнирного соединения с другими звеньями |

| Кривошип | Звено механизма, совершающее вращательное движение на полный оборот вокруг неподвижной оси |
Продолжение табл. 2
| Кинематическая схема звена | Название | Назначение |

| Направляющая | Звено механизма, служащее для формирования направления возвратно-поступательного движения звена, перемещающегося по его поверхности |

| Ползун | Деталь кривошипно-ползунного механизма, совершающая возвратно-поступательное движение |

| Подшипник скольжения | Изделие, являющееся частью опоры, которое поддерживает вал, ось или иную конструкцию, фиксирует положение в пространстве, обеспечивает вращение, качание с наименьшим сопротивлением, воспринимает и передаёт нагрузку на другие части конструкции |


| Пружина растяжения Пружина сжатия | Упругий элемент, предназначенный для накапливания и поглощения механической энергии |
Содержание отчёта
1. Название и цель работы.
2. Таблица классификации звеньев механизмов:
| Кинематическая схема звена | Название | Назначение, характер движения |
3. Изобразить кинематические схемы следующих механизмов:
 а)
а)
|  б)
б)
|
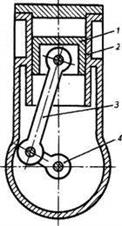
| Механизм двигателя внутреннего сгорания: 1 – поршень; 2 – цилиндр; 3 – шатун; 4 – кривошип | Схема трёхзвенного рычажного механизма: 1 – цилиндрический шарнир; 2 – стержень; 3 – сферический шарнир; 4 – кривошип |
в)
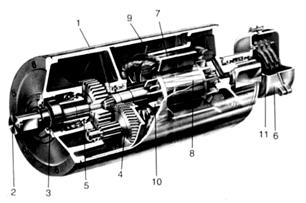
Привод ведущего барабана ленточного транспортёра:
1 – барабан; 2 – монтажная шейка вала; 3 – уплотнение; 4 – зубчатые колёса;
5 – подшипники; 6 – клеммная коробка; 7 – статор; 8 – редуктор; 9 – рёбра
для отвода тепла; 10 – крылья ротора; 11 – блок с контактными кольцами
г)
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 536; Нарушение авторских прав?; Мы поможем в написании вашей работы!