КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
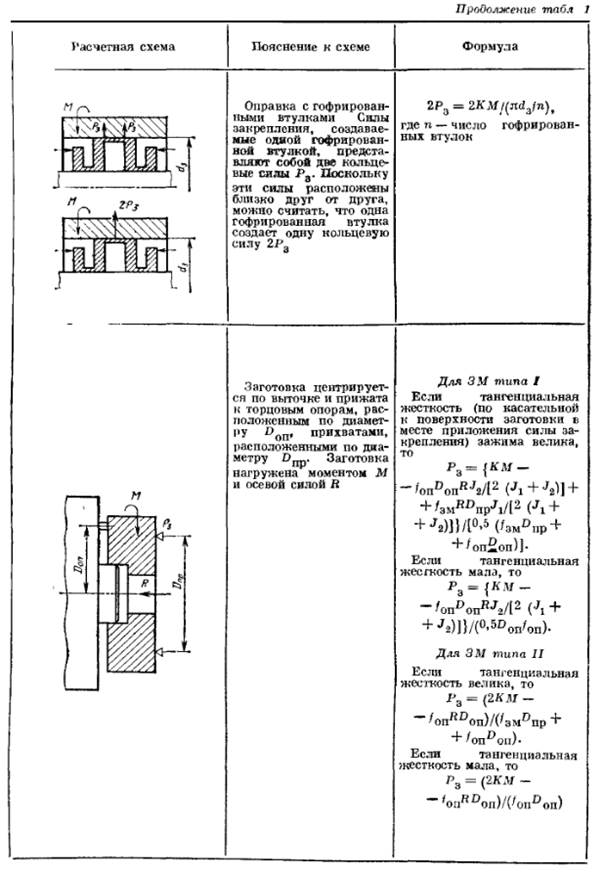
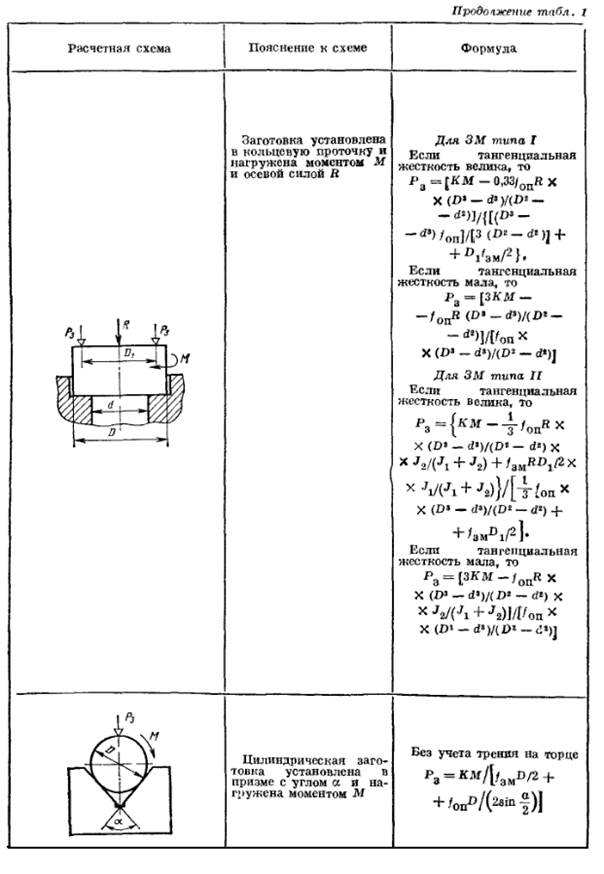
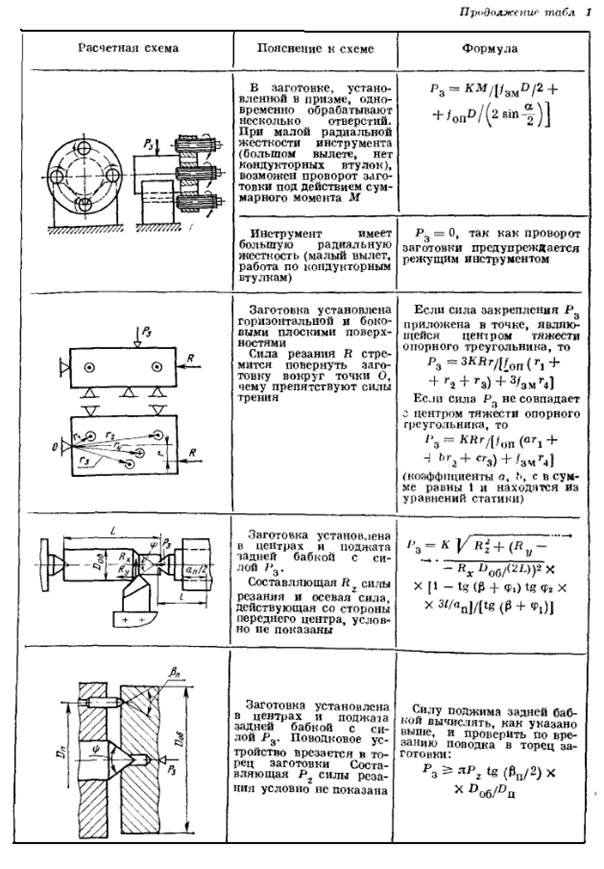
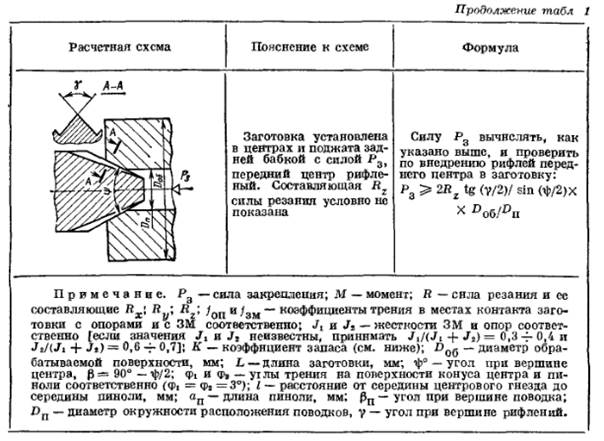
Расчет сил закрепления заготовок
|
|
|
|
Классификация зажимных приспособлений
Тема 5. ЗАЖИМНЫЕ ПРИСПОСОБЛЕНИЯ
Силовые механизмы приспособлений делятся на простые и комбинированные, т. е. состоящие из двух-трех сблокированных простых механизмов (см. схему).
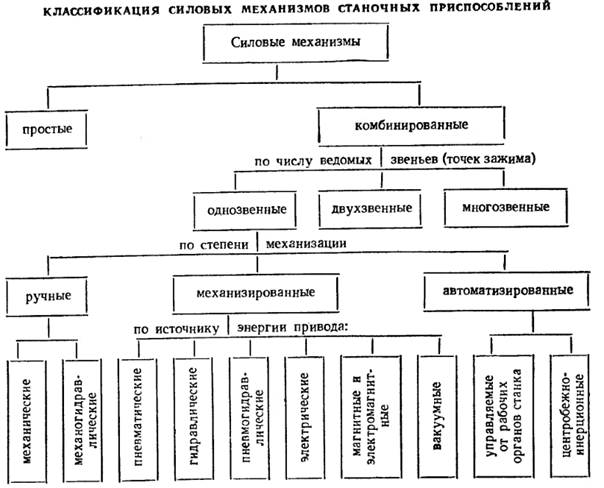
К простым механизмам относятся клиновые, винтовые, эксцентриковые, рычажные, рычажно-шарнирные и др. Простые механизмы принято называть зажимами.
Комбинированные механизмы обычно выполняются как винто-рычажные, эксцентрико-рычажные и т. п.
В тех случаях, когда простые или комбинированные механизмы используются в компоновках с механизированными приводами (пневматическими и др.), их называют механизмами-усилителями.
По числу ведомых звеньев механизмы делятся на однозвенные, двухзвенные и многозвенные (многоточечные).
Каждый силовой механизм имеет ведущее звено, к которому прикладывается исходная сила, и одно или несколько ведомых звеньев (прижимных планок, плунжеров, кулачков), передающих обрабатываемой детали силы зажима. Многозвенные механизмы зажимают одну деталь в нескольких точках или несколько деталей в многоместном приспособлении одновременно и с равными силами.
Особую группу многозвенных механизмов составляют самоцентрирующие патроны и оправки.
По степени механизации силовые механизмы классифицируются на ручные, механизированные и автоматизированные.
Ручные механизмы требуют применения значительной мускульной энергии и утомляют рабочего. Механизированные работают от энергии, передаваемой приводом. Автоматизированные приводятся в действие перемещающимися столами, суппортами, шпинделями станков или центробежными силами вращающихся масс и осуществляют зажим и раскрепление изделий без участия рабочего.
Назначение зажимных механизмов (ЗМ) станочных приспособлении состоит в надежном закреплении, предупреждающем вибрации и смещения заготовки относительно опор приспособления при обработке.
Основные требования к ЗМ. 1. Силы закрепления заготовок должны соответствовать силам резания, а в некоторых случаях силам тяжести (при обработке массивных заготовок, установленных консольно или наклоном) и силам инерции (при обработке с резким торможением, реверсом или в быстровращающихся СП). Предпочтительны самотормозящие ЗМ.
2. Сокращение вспомогательного времени и повышение производительности труда достигается мини-
3. Сокращение вспомогательного времени и повышение производительности труда достигается минимальным временем срабатывания ЗМ, которое обеспечивает быстро-действующий привод. При ручном приводе конструкция ЗМ должна соответствовать требованиям эргономики. Сила закрепления рукой не более 145—195 Н, в смену должно быть не более 750 закреплений.
4. Повышение точности обработки достигается при стабильных силах закрепления, что уменьшает погрешность закрепления. При изготовлении точных деталей необходимо избегать чрезмерных сил закрепления, вызывающих большие деформации заготовок или повреждения их поверхностей.
5. Ответственные детали ЗМ должны быть прочными и износостойкими. Необходимо защищать ЗМ от загрязнения и попадания стружки.
6. Конструкция ЗМ должна быть удобной в наладке и эксплуатации, ремонтопригодной, включать возможно большее число стандартных деталей и сборочных единиц.
При конструировании нового СП силу закрепления Р3 находят из условия равновесия заготовки под действием сил резания, тяжести, инерции, трения; реакций в опорах и собственно силы закрепления. Полученное значение силы закрепления проверяют из условия точности выполнения операции. В случае необходимости изменяют схему установки, режим резания и другие условия выполнения операции.
При использовании имеющегося приспособления с ЗМ, развивающим известную силу закрепления, расчет носит поверочный характер: требующаяся сила закрепления должна быть не больше известной; в противном случае изменяют решим резания, число проходов и другие условия обработки.
При расчетах силы закрепления следует учитывать упругую характеристику ЗМ. Самотормозящие ЗМ (винтовые, клиновые, эксцентриковые и т. п.) имеют линейную зависимость между приложенной силой и упругим перемещением (тип I).
Пневматические, гидравлические, пневмогидравлические ЗМ прямого действия имеют сложную зависимость между приложенной силой и упругими перемещениями (тип II).
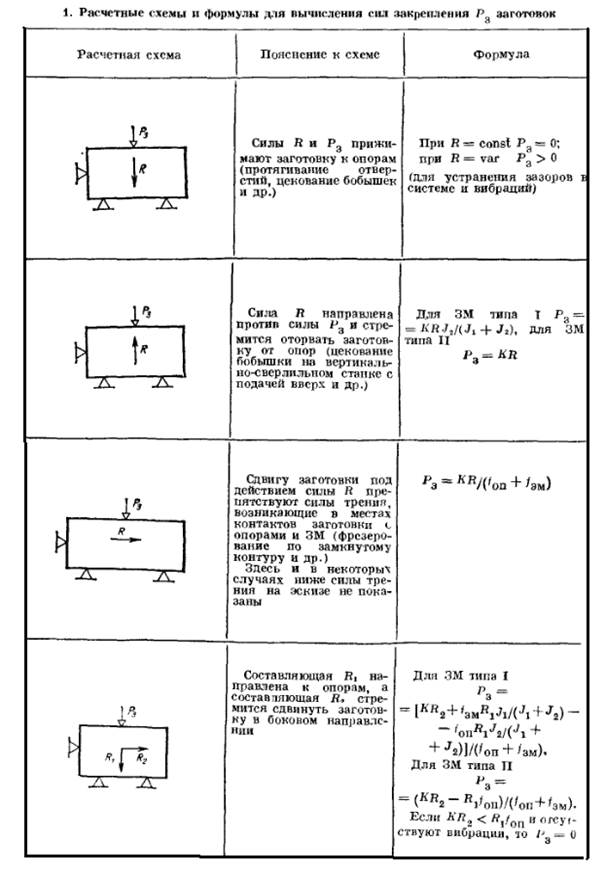
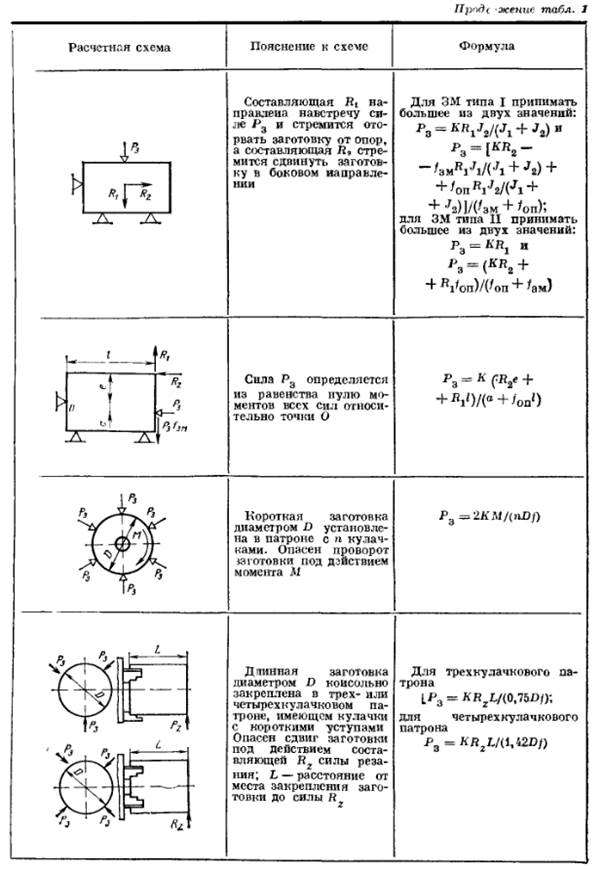
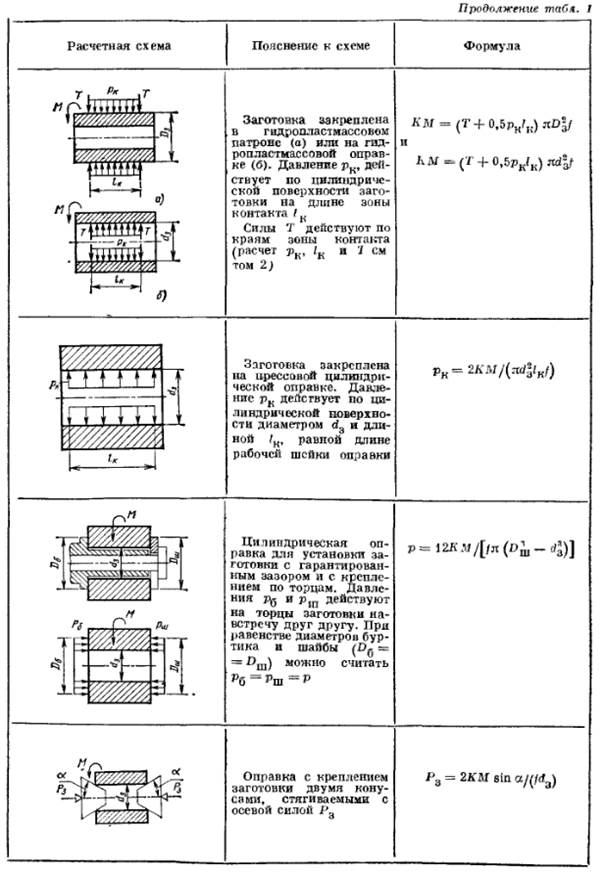
Силы закрепления определяют из условия равновесия заготовки (табл. 1).
Коэффициент запаса К, учитывающий нестабильность силовых воздействий па заготовку, вводят при вычислении силы Р3 для обеспечения надежного закрепления: К = K0K1K2K3K4K5K6.
Коэффициенты: K0 =1,5 — гарантированный коэффициент запаса; K1 учитывает увеличение сил резания из-за случайных неровностей на обрабатываемых поверхностях заготовок, при черновой обработке K1=l,2, при чистовой и отделочной K1 = l,0; К2 учитывает увеличение сил резания вследствие затупления режущего инструмента.
Коэффициент K3 учитывает увеличение сил прерывистом резания при прерывистом резании. При прерывистом точении и торцовом фрезеровании К3=l,2; или резание не является прерывистым, то К3=1,0.
Коэффициент К4 характеризует постоянство силы, развиваемой ЗМ. Для ЗМ с немеханизированным приводом, а также с пневмо- и гидроцилиндрами одностороннего действия К4=1,3. Если на силу закрепления влияют отклонения размеров заготовки, что имеет место при использовании пневмокамер, пневморычажных систем, приспособлений с упругими элементами (мембранных, гидропластмассовых и др.), К4=1,2. При использовании пневматических, гидравлических, пневмогидравлических двустороннего действия, магнитных, вакуумных и других ЗМ К4=1,0.
Коэффициент К5 характеризует эргономику немеханизированного ЗМ. При неудобном расположении рукоятки и угле ее поворота более 90° К5=1,2; при удобном расположении рукоятки и малом угле ее поворота К5=1,0.
Коэффициент К6 учитывают только при наличии моментов, стремящихся повернуть заготовку, установленную плоской поверхностью.
Литература:
1. Ансеров М. А. Приспособления для металлорежущих станков. Изд-е 4-е, исправл. и доп. Л., «Машиностроение» (Ленингр. отд-ние), 1975 г. - 656 с.
2. Станочные приспособления: Справочник. В 2-х т. /Ред. совет: Б. Н. Вардашкин (пред.) и др. — М.: Машиностроение, 1984. — Т. 1 /Под ред. Б. Н. Вардашкина, А. А. Шатилова, 1984. - 592с.
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 4607; Нарушение авторских прав?; Мы поможем в написании вашей работы!