КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
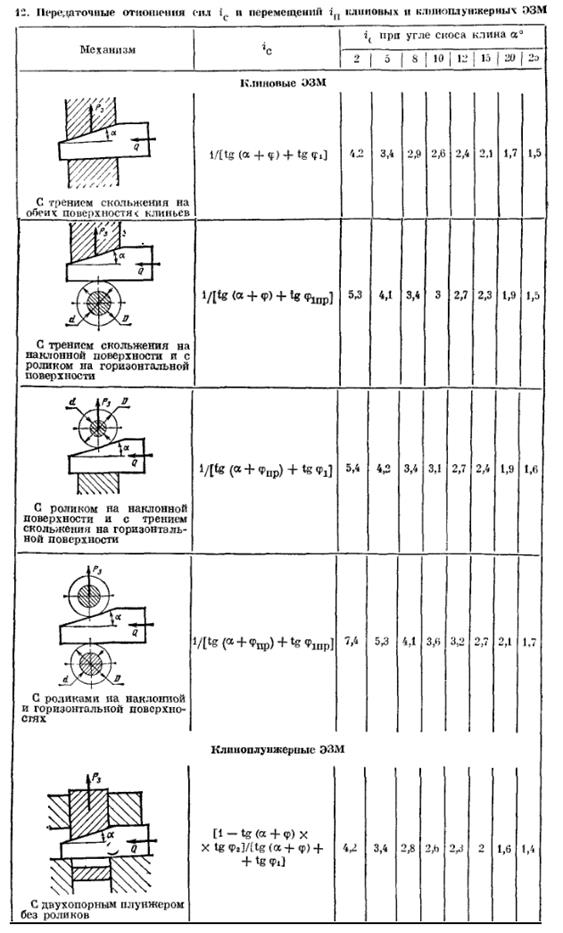
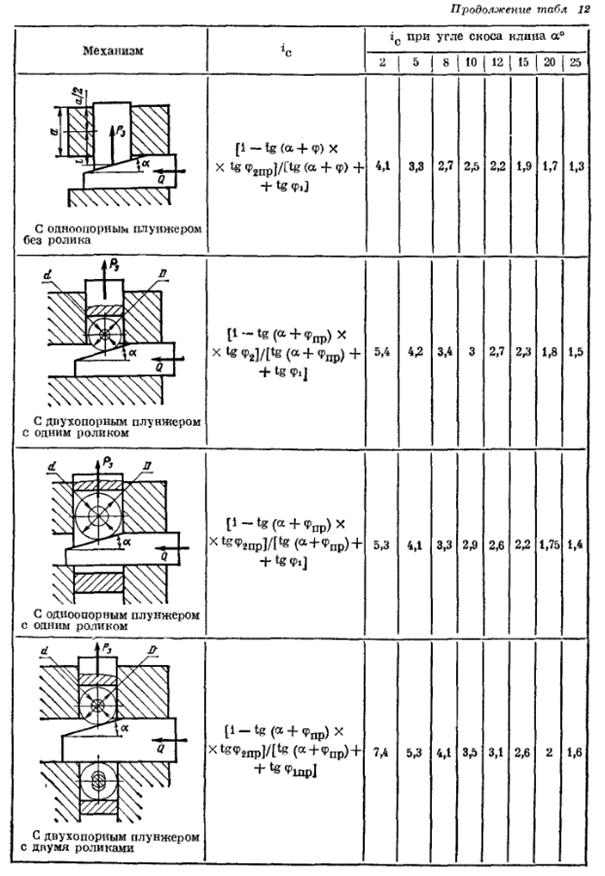
Расчет клиновых и клиноплунжерных ЭЗМ для непосредственного закрепления заготовки
|
|
|
|
Клиновые и клиноплунжерные механизмы
Различают следующие ЭЗМ- клиновые с односторонним клином и клиноплунжерные с одним плунжером (без роликов или с роликами), которые обычно используют в качестве усилителей пневмо- и гидроприводов; клиновые и многоплунжерные самоцентрирующие, применяемые в конструкциях оправок (например, оправки конические и кулачковые).
Преимущества: простота и компактность конструкции; удобство в наладке и эксплуатации; способность к самоторможению (механизмы с роликами не являются самотормозящими); постоянство сил закрепления, которые не зависят от допуска на размер заготовки.
Недостатки: сосредоточенный характер сил закрепления, что затрудняет использование этих механизмов при обработке нежестких заготовок; низкая надежность, которая зависит от характера клинового сопряжения, формы поперечного сечения плунжеров и пазов под плунжеры, зазоров между плунжерами и пазами, защищенности механизма от стружки.
Детали клиновых и клиноплунжерных ЭЗМ: клин, к которому приложена сила Q от привода; плунжеры (кулачки), развивающие силу закрепления Рз; корпус с пазами, в которых перемещаются клин и плунжеры (кулачки), опорные ролики (если в механизме предусмотрено их использование).
Важнейшим конструктивным элементом является угол скоса клипа a. С уменьшенном угла a увеличивается выигрыш в силе (iп=Pз/Q), но одновременно увеличивается проигрыш в перемещениях (iп=S(Q)S(Рз) = ctga). Здесь S(Pз) и S(Q) — перемещение плунжера (кулачка) и клина соответственно; iп зависит от потерь на трение; iп зависит только от угла а (табл. 12).
В механизмах без роликов для обеспечения надежного самоторможения рекомендуется угол a<5°30', а в несамотормозящих механизмах с роликами — a>10°.
1 Исходные данные: Рз — сила закрепления заготовки, Н; d — допуск па размер заготовки, мм (из чертежа заготовки).
2. Выбирают принципиальную схему механизма и угол a скоса клина.
3. Определяют ход плунжера (кулачка) S(Рз)= d+Dгар+DS(Рз)+Рз/J - где Dгар= 0,2 ¸ 0,4 мм — гарантированный зазор для свободной установки заготовки; DS(Рз)= 0,2 ¸ 0,4 мм — запас хода плунжера (кулачка), учитывающий погрешности изготовления и износ механизма; J — жесткость механизма; ориентировочно J = 1000 ¸ 2000 кН/м. При проектировании двухплунжерного механизма следует принимать J= 2500 ¸ 3500 кН×м; S(Рз) — ход каждого из двух плунжеров.
4. Ход клина S(Q)=S(Pз)ctga.
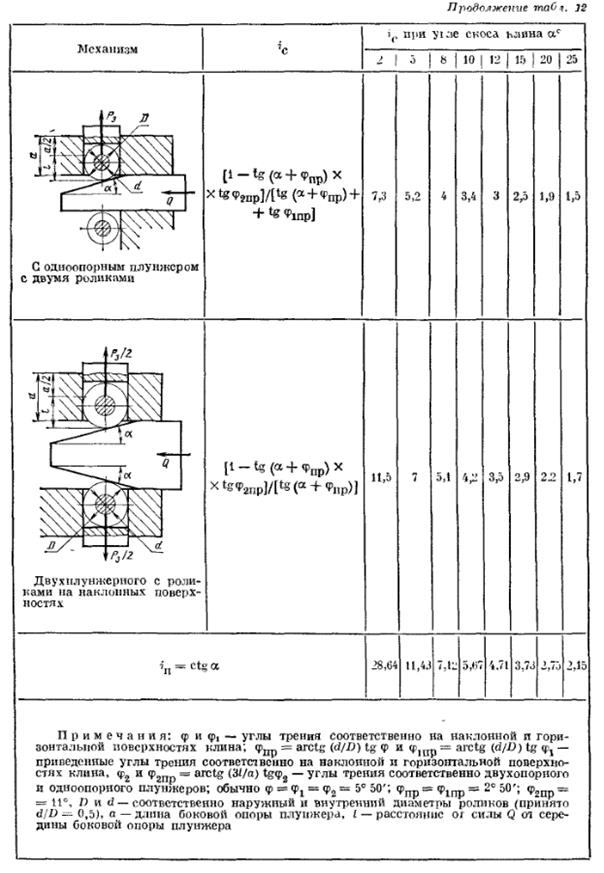
5. Сила на приводе Q= Pз:iс.
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 3840; Нарушение авторских прав?; Мы поможем в написании вашей работы!