КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные цели и задачи динамических расчетов, механических систем с учетом упругости звеньев. 2 страница
|
|
|
|
13. КРУТИЛЬНЫЕ СВОБОДНЫЕ КОЛЕБАНИЯ.
Крутильный маятник – упругий безинерционный вал диаметром d, длиной l.
Абсолютно жесткий диск диаметром D, с моментом инерции I.
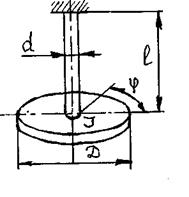
Если диск повернуть на малый угол φ относительно оси вала и отпустить, то крутящий момент, появившийся при закручивании вала, приведет его в состояние свободных крутильных колебаний. При этом момент, передаваемый на диск от закрученного вала, пропорционален углу закручивания и всегда действует противоположно вращению диска:
 = -ск ·
= -ск ·  , где ск – жесткость при кручении, крутящий момент, отнесенный к единице угла поворота, тогда диф. ур-е движения (гармонические крутильные колебания) запишется: I φ = - ск · φ, (9)
, где ск – жесткость при кручении, крутящий момент, отнесенный к единице угла поворота, тогда диф. ур-е движения (гармонические крутильные колебания) запишется: I φ = - ск · φ, (9)
где I – момент инерции диска,
φ – угол поворота,
ск – жесткость при кручении,
 – угловое ускорение.
– угловое ускорение.
 разделим на I
разделим на I  (10)
(10)
где  (11)
(11)
Решение уравнение (10) по аналогии с уравнением (4) запишется:
φ = φо ·cos pt +  · sin pt (12)
· sin pt (12)
в эквивалентном виде
φ = А ·cos(pt-α) (13)
где:
φо – угловое перемещение,
– начальная скорость (угловая) в начальный момент времени t=0,
α – фазовый угол;
Период крутильного колебания равен:  ;
;
Частота крутильных колебаний  ;
;
Если вал диаметром d имеет длину l, то жесткость при кручении будет равна:
 , (14)
, (14)
где G - модульупругости II рода (модуль сдвига) [ G для стали = 8,4 · 1010 Па]
I - момент сопротивления кручению поперечного сечения вала, который в случае круглого сечения равен полярному моменту инерции сечения
Если диск является однородным и диаметр D и вес известны, то момент инерции диска:
 ,
,
где Q – вес,
D – диаметр,
т.е. рассчитав I диска и Ск вала, мы определим р.
Если вал имеет два участка различных диаметров и длин, то требуется определить ск эквивалентного вала, можно двумя способами:
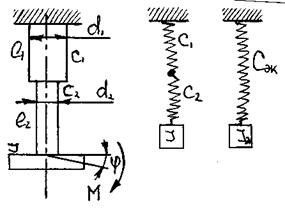
1 способ. Строится модель с последовательно соединенными пружинами, имеющими разную ск.
При последовательном соединении безинерционных упругих связей складываются податливости.
Следовательно:
еэкв = е1 + е2 = 
Тогда: сэкв =  (15)
(15)
2 способ. φ – полный угол закручивания ступенчатоговала будет равен:
φ =  +
+  =
= 
 =
=  ;
;
таким образом, эквивалентная длина вала диаметром d1 равна:
Lэкв =  (16)
(16)
Т.е. угол закручивания вала ступенчатого с двумя диаметрами d1 и d2 равен углу закручивания вала с постоянным диаметром d1 и приведенной длиной Lэкв.
Впервые на проблему необходимости исследований крутильных колебаний при проектировании сложных технических систем указал случай вала, работающего на подшипниках (без учета трения), несущего на концах абсолютно жесткие тела: например, вал с пропеллером на одном конце и ротором турбины на другом (в самолетостроении).
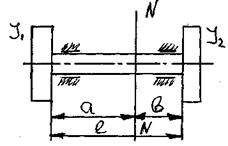
Если 2 диска закрутить в противоположных направлениях, а затем отпустить, возникнут свободные крутильные колебания. Из принципа сохранения момента кол-ва движения следует, что диски всегда должны вращаться в противоположных направлениях, а значит, есть промежуточное поперечное сечение N-N, в котором деформации вала не происходят, так называемое узловое сечение.
Найдем его положение исходя из следующих соображений:
1. Диски должны иметь один и тот же период колебаний, иначе не будет вращения противоположного, т.е.: 
2. Т.к. ск обратно пропорциональна длине, то:

с учетом, что а + в =l, получим 
Наличие узлового сечения N-N позволяет перейти к эквивалентной схеме, состоящей из двух крутильных маятников, имеющих одинаковые периоды, частоты собственных колебаний.

Т.е. если известны размеры вала, моменты инерции вращающихся деталей и модуль упругости материала при сдвиге, то для приводов данной исходной схемы можно определить
р, ν, Т
14. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ ЛИНЕЙНЫХ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ БЕЗ ДЕМПФИРОВАНИЯ (установившееся движение).
Если система подвергается внешним воздействиям – силам, зависящим от времени, или специального вида опор, то динамическое поведение её становится более сложным нежели свободное колебание. На практике часто внешние силы изменяются во времени периодически и приложены к массе, в этом случае реакции систем показывают вынужденными колебаниями.
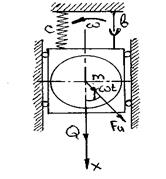
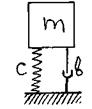
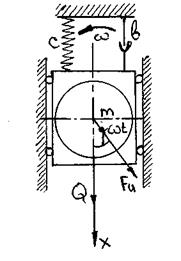
Рассмотрим мех. систему – электродвигатель весом Q закреплен на пружине, которая ограничивает движение системы и та движется только в направлении по оси х. вал электродвигателя вращается с постоянной угловой скоростью ω и имеет дисбаланс D.
1 случай.
D= е·М
 Fи = D · ω
Fи = D · ω
cила приложения к массе, D дисбаланс порождает вращающую центробежную силу Fи, которая и вызывает вынужденные колебания системы.
Запишем уравнение движения системы, используя 2-ой закон Ньютона:
m  = Q – (Q+e x) + Fu sin ω·t
= Q – (Q+e x) + Fu sin ω·t
m + cx = Fu sin ω·t  : m
: m
+ p2x = q sin ω·t, (17) неоднородное дифференциальное уравнение вынужден-
ных установившихся колебаний
где: q – уд.сила, отнесенная к единице массы.
Частное решение:
х = с3 sin ω·t подставим в уравнение (17), получим -с3 ω2 sin ω·t + с3 р2 sin ω·t = q sin ω·t
 (18)
(18)
Общее решение: х = c1 · cos pt + c2 · sin pt +  , (19)
, (19)
где: два первых члена описывают свободные колебания системы, которые имеют период Т =  ,
,
третий член зависит от возмущающей силы, характеризует вынужденное колебание с периодом Т =  .
.
Движение, определяемое уравнением (19), следовательно, представляет сумму 2-х гармонических колебаний, имеющих в общем случае 2 различных периода.
Т.к. в реальной мех. системе действуют силы трения, то свободные колебания со временем затухают и движение приходит к установившимся вынужденным колебаниям, которые полностью описываются уравнением (18)
Вынужденные колебания, поддерживаемые внешней возмущающей силой, имеют большое практическое значение – имеют большое распространенное в технике и окружающем мире.
В уравнение (18) вынесем из знаменателя р 2: х =  ,
,
тогда x=  , (20) - уравнение установившихся вынужденных колебаний
, (20) - уравнение установившихся вынужденных колебаний
где:  ·sin ωt – перемещение, обусловленное действием возмущающей силы F sin ωt,
·sin ωt – перемещение, обусловленное действием возмущающей силы F sin ωt,
когда она приложена статически;
 – множитель учитывает динамический характер этой силы.
– множитель учитывает динамический характер этой силы.
β = , (21) абсолютная величина этого выражения называется коэффициентом
динамичности.
Мы рассмотрели действие силы пропорциональной sin ωt, то же справедливо и дляcos ωt.
2 случай - вынужденных колебаний возможен при периодичеком движении опор
уравнение движения
m = Q – [Q + c(x-x0)]
x0 = r· cos ω t
получим:
+ p2x =  · r ·cos ω t
· r ·cos ω t
данное уравнение аналогично выражению (17)
т.е. · r ≡ q, тогда решение данного уравнения запишется: x = 
выносим р2
x= r· cos ω t · β (22)
таким образом для того, чтобы вычислить установившееся вынужденное колебание системы достаточно рассмотреть перемещение массы, обусловленное перемещением опоры.
График зависимости β от Z: Z =  – коэффициент частотной расстройки
– коэффициент частотной расстройки
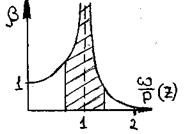
Рассмотрим 3 случая отношения .
1 случай: ω «р значение коэф. β=›1 ( стремится к 1), т.е. перемещение системы близко по значению к случаю статического действия возмущающей силы, кроме того колебания массы и возмущающей силы совпадают по фазе, т.е. перемещение массы совпадает с направлением вектора возмущающей силы.
2 случай: = 0
Амплитуда вынужденных колебаний стремится к ∞, т.е. – условие резонанса (ω=р).
3 случай: ω» р, т.е. β  0 когда на тело действуют с большой частотой, вызываемое колебание имеет очень малую амплитуду, можно говорить, что тело сохраняет стационарное состояние, практически неподвижно. Динамические перемещения в этом случае в противофазе, т.е. масса перемещается в направлении противоположном направлению вектора возмущающей силы.
0 когда на тело действуют с большой частотой, вызываемое колебание имеет очень малую амплитуду, можно говорить, что тело сохраняет стационарное состояние, практически неподвижно. Динамические перемещения в этом случае в противофазе, т.е. масса перемещается в направлении противоположном направлению вектора возмущающей силы.
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
С УЧЕТОМ ДЕМПФИРОВАНИЯ
Для проведения аналитических исследований при обеспечении более точного результата исследований необходимо учитывать влияние демпфирующих сил:
- трение между сухими поверхностями скольжения;
- трение с учетом смазывающих материалов;
- сопротивление воздуха или жидкостей;
- внутреннего трения материалов.
Простейший случай для математического исследования, когда демпфирующая сила пропорциональна скорости – вязкое демпфирование.
Поэтому силы сопротивления с более сложной природой при исследованиях заменяются силами эквивалентного вязкого демпфирования,
Эквивалентное демпфирование определяют из условия:
за один цикл при нем рассеивается столько же энергии, сколько при действии реальных сил сопротивления.
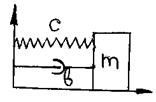
Рассмотрим расчетную динамическую модель с демпфером.
Предположим, что вязкая жидкость в демпфере оказывает сопротивление пропорциональное скорости движения системы.
F = - b  , (24)
, (24)
где: b – коэф.пропорциональности (коэф. вязкого демпфирования),
F – линейная сила сопротивления.
Уравнение движения системы:
m = Q –(Q + cx) – b
m + b + cx = 0 : m - дифференциальное уравнение системы свободных
колебаний с демпфированием.
+2п + р2х = 0, (25) – дифференциальное однородное уравнение свободных
где: колебаний с демпфированием
2п =  – параметр демпфирования.
– параметр демпфирования.
Решение уравнения (25) в общем виде:
х = еnt(c1 · cos pд t + c2 · sin pд t), (26)
где: е - основание натурального логарифма,
п – параметр демпфирования,
рд – собственная круговая частота с учетом демпфирования.
Рассмотрим начальный момент:
t = 0; x = x0; = 0; c1 = x0; c2 =  ;
;
Решение уравнения (25) в эквивалентном виде:
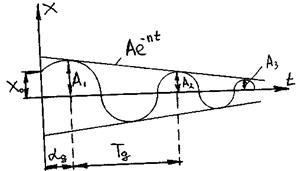
x = A · e-nt · ( cos pg ·t – αg), (27)
где: A =  ,
,
αg – фазовый угол демпфированной системы, α = arctg 
pg =  ; pg = p
; pg = p  , (28) ξ =0,1÷0,2
, (28) ξ =0,1÷0,2
где: ξ – коэффициент демпфирования системы; ξ =  ; p = p g.
; p = p g.
Возможность использования при решении практических задач вместо pg значение p, подтвердимграфиком зависимости  (ξ)
(ξ)
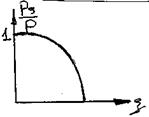
Т.к. практическое значение ξ небольшое, по графику значения ξ соответствуют отношению , очень близко равным к 1.
График свободных колебаний системы с демпфированием:
 ,
,
где: Tg – период колебаний с демпфированием
n · Tg = λ, (29)
λ – логарифмический декремент затуханий
Для практических задач: λ = n ·  ≈ ξ ·2 π
≈ ξ ·2 π
Из уравнения (29) λ = ln  , (30)
, (30)
Если при числе колебаний равных k
λ =  · ln (31)
· ln (31)
= eλ (32)
ПРАКТИЧЕСКОЕ ПРИМЕНЕНИЕ СВОБОДНЫХ КОЛЕБАНИЙ С ДЕМПФИРОВАНЕМ. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА СУХОГО ТРЕНИЯ.
Рассмотрим расчетную динамическую модель, состоящей из жесткости и массы
Выведем из 2-х способов состояние свободного равновесия. Потеря энергии, или совершаемая работа, системы за цикл равна:
ΔW =  (cA12 – cA22) = c · (A1 + A2) · (A1 – A2) = c · Acp · ΔA
(cA12 – cA22) = c · (A1 + A2) · (A1 – A2) = c · Acp · ΔA
ΔW = 4Acp ·Fmp
c · Acp · ΔA = 4Acp ·Fmp
ΔA =  =
=  =
= 
f = 
18.
УСТАНОВИВШЕЕСЯ ВЫНУЖДЕННОЕ КОЛЕБАНИЕ С ДЕМПФИРОВАНИЕМ
С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
В реальных системах кроме сил упругости F = -cx, возникающих в пружине при деформации и силы сопротивления F= -bx часто приводится приложенная извне возмущающая сила, изменяющаяся по гармоническому закону. Например, при работе электродвигателя с неотбалансированным ротором возникает вращающаяся центробежная сила.
 поп = (0,7÷1,3) ·пкр
поп = (0,7÷1,3) ·пкр

 /:т
/:т
 (33) - дифференциальное однородное уравнение вынужденных колебаний с демпфированием
(33) - дифференциальное однородное уравнение вынужденных колебаний с демпфированием
Частное решение:
x = M cos ω t + N sinω t (34)
Общее решение: x = e-nt (c1 cos pg ·t + c2 sin pg t ) + M cos ω t + N sin ω t
I II
I – описывает демпфированные свободные колебания с периодом Tg =  и благодаря множителю e-nt данное колебание затухает и остаются только установившиеся вынужденные колебания системы, описываемые в слагаемом II, период этих колебаний совпадает с периодом возмущающей силы.
и благодаря множителю e-nt данное колебание затухает и остаются только установившиеся вынужденные колебания системы, описываемые в слагаемом II, период этих колебаний совпадает с периодом возмущающей силы.
Выражение (34) для установившегося поведения системы может быть записано в эквивалентной форме с фазовым углом
х = A cos(ω ·t –Θ), (35)
где А – амплитуда, A =  Θ =arctg
Θ =arctg  q=
q=  ξ=
ξ=
A =  = вынесем p2 =
= вынесем p2 = 
A =  (36) -амплитуда вынужденных колебаний с одной степенью
(36) -амплитуда вынужденных колебаний с одной степенью
свободы с демпфированием.
β = 
Ag =  ·β
·β
x = Acm· β · cos (ω t- Θ),
где: Acm = ,
т.е. амплитуда установившихся вынужденных колебаний системы с демпфированием можно получить, умножив величину перемещения системы при статически приложенной нагрузке (Аст) на коэффициент динамичности β, который в данном случае зависит не только от коэффициента расстройки z = , но и от коэффициента демпфирования ξ, т.е. в выражении β присутствует ξ.
Определим возможно максимальное значение Адин:
βmax =  ; z = = 1;
; z = = 1;
Amax = · =  =
=  ;
;
Amax =  (37)
(37)
19,20
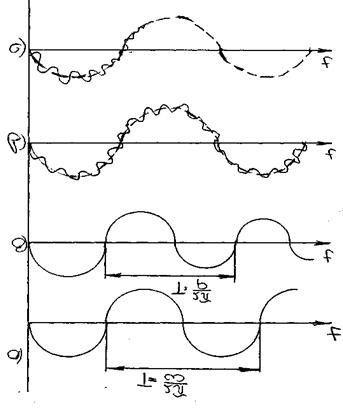
ОБОБЩЕННАЯ ПЕРИОДИЧЕСКАЯ ВОЗМУЩАЮЩАЯ СИЛА.
Ранее предполагалось, что возмущающая сила вынужденных колебаний описывается функцией пропорциональной либо sin ωt, либо cos ωt. В общем случае встречаются возмущающие силы, описываемые более сложными периодическими функциями.
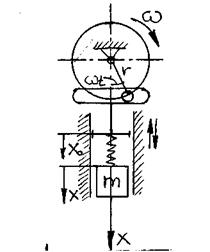
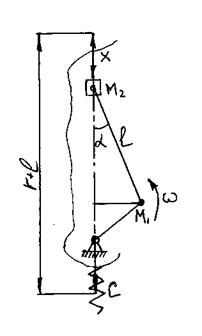
Пример: Одноцилиндровый двигатель имеет неотбалансированные детали, которые совершают вращательное и возвратно-поступательное движения внутри картера и порождают периодическую возмущающую силу, вызывающую вынужденные колебания всей системы. Требуется установить точный характер возмущающей силы и отношение её периода к периоду собственных колебаний системы.
r – радиус кривошипа
l – длина
ωt – угол поворота
Приведем массы подвижных
частей механизма в т. М 1 и т. М 2
F1 =- М1 · ω ² · r · cos ωt –
т.к. М 1 совершает вращательное движение.
(М 1 и М 2 – приведенные сосредоточенные массы)
F2 =- М2 · х – т.к. М2 совершает возвратно-поступательное движения.
Тогда: х = е(1- cos α) + r(1- cos ωt) *
r sin ωt = е sin α => sin α = 
cos α = 
выражение  разложим в степенной ряд (ряд Тейлора)
разложим в степенной ряд (ряд Тейлора)
= 1- 
Возьмем два члена ряда и запишем: 
Подставим это в предыдущее выражение * и получим: 
Т.к.  , то
, то 
 ;
; 
тогда: 
 (39)
(39)
Обобщенная периодическая сила F(t) есть сумма двух слагаемых, первое из которых имеет круговую частоту равную частоте вращения вала двигателя ω, второе слагаемое имеет частоту равную 2 ω.
Таким образом, существует две критических частоты вращения вала двигателя:
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 923; Нарушение авторских прав?; Мы поможем в написании вашей работы!