КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Прикладные модули модели воздушного судна
|
|
|
|
Заменитель
Заменителями называются приложения, реализующие тактику «введение посредника». Они ответственны за межсистемный обмен данными — конкретнее, между моделью воздушного судна, с одной стороны, и моделью окружающей среды или операторской станцией — с другой. Располагая информацией о физических характеристиках систем, с которыми они взаимодействуют, заменители обеспечивают представление, предоставляют протокол передачи данных и т. д.
Возьмем для примера ситуацию, в которой на операторской станции проводится мониторинг данных состояния модели воздушного судна и его результаты выводятся на дисплей для просмотра оператором. Взяв на себя управление процессором, заменитель собирает корректные данные, которые затем отправляет на операторскую станцию. Возможна и обратная ситуация, когда оператор в ходе тренировки экипажа устанавливает то или иное состояние модели воздушного судна. Заменитель, получив событие, передает его процессору событий, а тот оповещает соответствующие подсистемы.
В условиях применения заменителя периодический планировщик и обработчик событий могут не располагать детальной информацией об операторской станции или платформе, на которой функционирует модель окружающей среды. Все системно-ориентированные знания в таком случае встроены в заменитель. Распространение любых вносимых в эти платформы изменений в системе моделирования воздушного судна ограничивается заменителем.
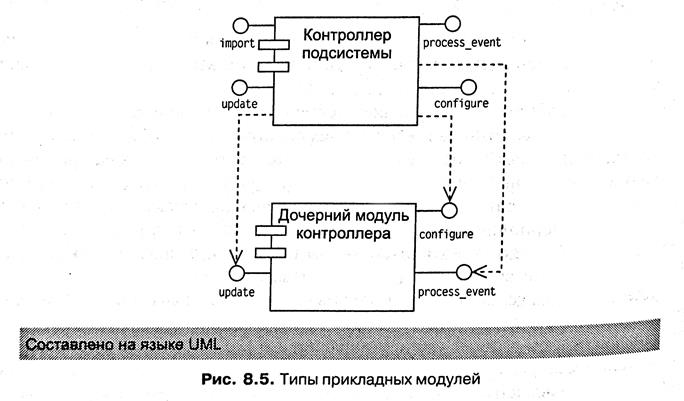
Типы модулей прикладного субэлемента структурной модели воздушного судна показаны на рис. 8.5. Собственно, их всего два: контроллер подсистемы (subsystem controller) и дочерний модуль контроллера (controller child). Контроллеры подсистем передают данные от других и другим экземплярам контроллеров подсистем, их дочерним модулям. Дочерние модули контроллеров передают данные, между собой и своими родителями; с другими дочерними модулями они взаимодействуют. Управление они получают только от родителей и возвращают его им же. Эти ограничения запрещают дочерним модулям передавать данные 10управление даже своим братьям. Запрет на сцепление дочерних экземпляров с кем-либо иным, кроме своих родительских элементов логически обосновывается задачами по достижению интегрируемости и модифицируемости.
В роли посредника при воздействии модификаций и интеграции всегда выступает родительский контроллер подсистемы. Все это согласуется с тактикой «ограничение обмена данными».
Контроллер подсистемы
Контроллеры подсистем взаимосвязывают ряд функционально-ориентированных дочерних модулей, решая тем самым две задачи:
♦ моделирование подсистемы в целом;
♦ посредничество в обмене данными управления и непериодическом обмене между системой и подсистемами.
Кроме того, они ориентируют дочерние модули на реализацию тренировочной функциональности — в частности, моделирование неисправностей и установку параметров.
Поскольку образец «структурная модель» ограничивает обмен данными между дочерними модулями контроллера, контроллеру подсистемы приходится устанавливать между ними самими, с одной стороны, и между ними и другими подсистемами — с другой, логические соединения. Входящие соединения удовлетворяют аналогичные потребности сторонних подсистем и заменителей. Эти соединения представляют собой наборы имен, посредством которых контроллеры подсистем осуществляют внутренние обращения к внешним данным. Допущения об установлении соединений принимаются при считывании или записи таких имен. Механизм фактического установления соединений определяется позже, на стадии детального проектирования, и выражается в изменяемом параметре образца (изменяемые параметры рассматриваются в главе 14 «Линейки продуктов»). Помимо установления соединений между собственными дочерними модулями и дочерними модулями других подсистем контроллер подсистемы исполняет роль посредника во взаимодействии между своими дочерними модулями - дело в том, что ограничение средств связи между ними предполагает запрет На прямой обмен данными.
Как мы уже говорили, система моделирования условий полета может находиться в нескольких состояниях. Посредством организующей части она переводится в конкретное состояние исполнения. После этого организующая часть со- °6щает контроллеру подсистемы о текущем состоянии. Для нас значимыми Являются состояния «Работа» (operate) и «Стабилизация» (stabilize). В состоянии работы контроллер подсистемы выполняет нормальные вычисления, сиособ- f дующие продвижеиию состояния моделирования. В состоянии стабилизации к'жтроллер подсистемы управляемым образом завершает текущие вычисления (при неконтролируемом завершении спорадические движения платформы могут повредить экипажу). Последовательность действий при этом выглядит так:
♦ Под прямым контролем организующей части происходит извлечение и локальное сохранение значений входящих соединений. Тем самым обеспечивается непротиворечивость данных и временная связность.
♦ Под контролем экземпляров организующей части проводится стабилизация алгоритмов моделирования дочерних модулей. После этого организующая часть признает подсистему в целом полностью стабильной.
Контроллеры подсистем должны выполнять следующие действия.
♦ В ответ на любое событие инициализировать себя и все свои дочерние модули набором начальных условий.
♦ Основываясь на знаниях возможностей дочерних модулей, передавать им запросы на неисправности и настройки параметров моделирования.
Наконец, контроллеры подсистем в некоторых случаях проводят реконфигурацию параметров задания, касающихся, в частности, вооружений, грузоподъемности и начального местоположения учебных заданий. Реализация этих возможностей проводится посредством периодических и непериодических операций, предоставляемых генератору периодической последовательности и обработчику событий соответственно.
Контроллеры подсистем должны предоставлять две периодические операции - update и import — и могут поддерживать две другие (непериодические): process_event и configure.
Update
Операция update заставляет контроллер подсистемы проводить периодическую обработку согласно текущему рабочему состоянию, которое предоставляется в качестве входного параметра. В состоянии operate операция update заставляет контроллер подсистемы:
1) устанавливать входные соединения и извлекать для дочерних модулей входные данные;
2) исполнять операции дочерних модулей в логической последовательности, с расчетом на распространение среди них изменений;
3) извлекать выходные данные дочерних модулей, удовлетворяя тем самым сторонние входящие соединения или исходящие соединения подсистемы.
Помимо исполнения функций генератора периодической последовательности этот алгоритм логически «склеивает» дочерние модули и придает моделированию связный, гармоничный характер. Этой цели служат вычисления, преобразования данных и изменения.
В состоянии stabilize операция update заставляет контроллер подсистемы провести одну итерацию алгоритма стабилизации и проверить, удовлетворены ли локально определенные критерии стабильности. Операция update предоставляет один выходной параметр, выражающий суждение контроллера относительно стабильности подсистемы. Предполагается, что такое заключение можно сделать локально, хотя, с другой стороны, такая возможность присутствует не всегда.
Контроллеры подсистем могут выполнять, а могут и не выполнять нижеследующие задачи.
♦ import. Операция import заставляет контроллер подсистемы завершать некоторые входные соединения — считывать их значения и проводить их локальное сохранение в расчете на последующее применение операцией update.
Контроллеры подсистем предоставляют две непериодические операции: process event и configure.
♦ process, event. Операция process_event применяется в преимущественно периодических рабочих состояниях (к числу которых, в частности, относится состояние operate) для вызова реакции контроллера подсистемы на событие, предоставляемое в виде входного параметра. Под эту категорию подпадает ряд событии операторской станции: process_malfunction, set_parameter л hold_parameter.
♦ configure. Операция configure применяется в таких преимущественно непериодических состояниях системы, как initialize. Она предназначена для установления именованного набора условий — например, конфигурации учебного устройства или тренировочного задания. Информация, необходимая контроллеру подсистемы для установления такого состояния, может предоставляться в виде входного параметра, ячейки памяти вторичного запоминающего устройства или извлекаться из базы данных. Контроллер подсистемы вызывает такие операции своих дочерних модулей, которые приводят к установлению требуемых состояний.
|
|
|
|
|
Дата добавления: 2015-04-25; Просмотров: 419; Нарушение авторских прав?; Мы поможем в написании вашей работы!