КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Широтно-импульсная модуляция
|
|
|
|
Регулирование выходного напряжения и тока в инверторах, широтно-импульсная модуляция.
Автономные инверторы напряжения редко используются как самостоятельное преобразовательное устройство, а в большинстве случаев они являются структурным элементом некоторой преобразовательной системы или системы электроснабжения. В зависимости от назначения системы требования, предъявляемые к параметрам выходного напряжения, например, необходимость стабилизации или диапазон регулирования, точность поддержания заданной величины, степень несинусоидальности и т.п., могут быть достаточно разнообразными. Иногда методы формирования кривой выходного напряжения переплетаются со способом регулирования его величины, например, при использовании широтно-импульсной модуляции (ШИМ). Так или иначе, в большинстве случаев при разработке преобразователя частоты на базе АИН стоит задача обеспечить возможность регулирования величины выходного напряжения. В настоящее время, основные способы решения этой задачи можно подразделить на следующие несколько видов:
· амплитудное регулирование;
· регулирование методом геометрического суммирования;
· широтно-импульсное регулирование на основной частоте;
· широтно-импульсное регулирование на несущей частоте;
· широтно-импульсная модуляция.
Широтно-импульсное регулирование на несущей частоте можно рассматривать как частный случай широтно-импульсной модуляции, при котором модулирующий сигнал имеет прямоугольную форму. Известны и комбинированные методы, такие как, например, амплитудно-широтно-импульсная модуляция [2,4].
Метод широтно-импульсной модуляции (ШИМ) является одним из наиболее эффективных, с точки зрения улучшения качества выходного напряжения АИН. Основная идея метода заключается в том, что кривая выходного напряжения формируется в виде серии высокочастотных импульсов, длительность которых изменяется (модулируется) по определенному закону, в большинстве случаев – синусоидальному. Частота следования импульсов называется несущей (или тактовой) частотой, а частота, с которой осуществляется изменение длительности импульсов, – частотой модуляции. Поскольку несущая частота обычно существенно выше частоты модуляции, то гармоники кратные несущей частоте, присутствующие в спектре выходного напряжения, относительно легко подавляются с помощью соответствующего фильтра.
В настоящее время известно достаточно много видов ШИМ, классифицируемых по различным признакам [2,4]. Так, например, по виду импульсов выходного напряжения различают модуляцию однополярную и двуполярную. Простейшим примером двуполярной модуляции могут служить процессы, реализуемые в однофазной полумостовой схеме инвертора (рис. 4.9). Импульсы управления, подаваемые на базы силовых транзисторов, как показано на рисунке 4.9(б), формируются в результате сравнения модулирующего, низкочастотного напряжения  с опорным напряжением
с опорным напряжением  пилообразной формы, частота которого и является несущей частотой.
пилообразной формы, частота которого и является несущей частотой.
Предположим, что система управления организована так, что если мгновенное значение опорного напряжения больше, чем величина модулирующего напряжения, то включается транзистор VT2 и на нагрузке формируется импульс положительной полярности, как показано на рисунке 4.9(в). Соответственно, если опорное напряжение становится меньше модулирующего напряжения, то транзистор VT2 выключается и включается транзистор VT1, что приводит к изменению полярности напряжения на нагрузке. При активно-индуктивном характере нагрузки изменение полярности выходного напряжения происходит за счет включения обратного диода VD1, через который замыкается ток нагрузки, поддерживаемый за счет эдс индуктивности L.
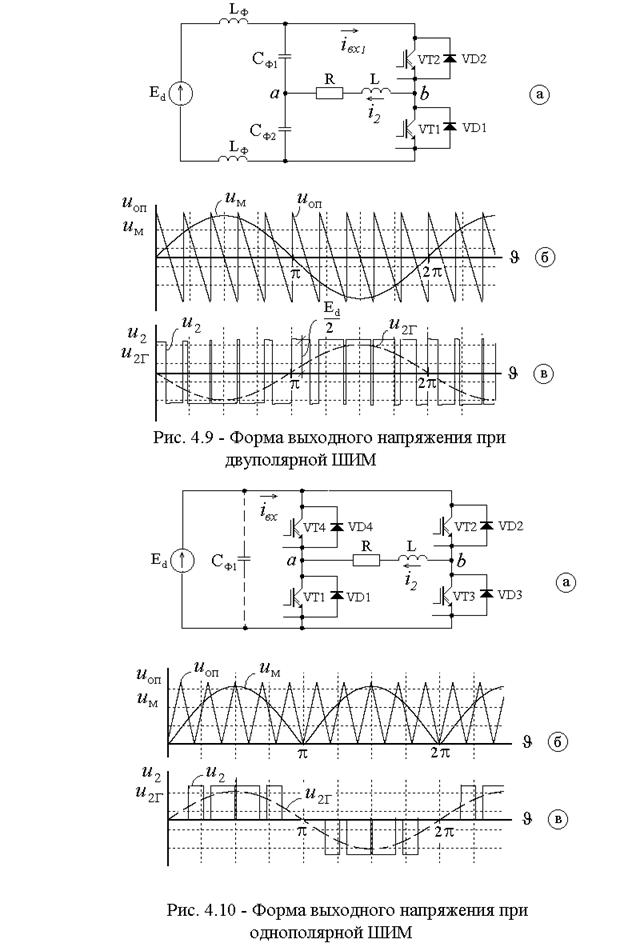
При изменении модулирующего напряжения происходит изменение длительности положительного и отрицательного импульсов выходного напряжения, соответственно, изменяется среднее значение напряжения за период несущей частоты.
Совокупность этих средних значений выходного напряжения и формирует гладкую составляющую, форма которой определяется модулирующим сигналом. Основным недостатком двуполярной модуляции является большая амплитуда первой гармоники несущей частоты.
При однополярной модуляции, как показано на рисунке 4.10, в кривой выходного напряжения в течение одной полуволны модулирующего сигнала формируются импульсы только одной полярности, а вместо импульсов напряжения противоположной полярности формируется интервал с нулевым напряжением (нулевая полочка). При этом, при изменении длительности импульсов напряжения, соответственно, изменяется длительность нулевой полочки таким образом, чтобы период несущей частоты оставался постоянным.
Однополярная модуляция может быть реализована в однофазной мостовой схеме АИН при условии, что одна пара силовых транзисторов, например, VT1 и VT4 переключаются с частотой сигнала модуляции, в моменты  и т.д., а вторая пара транзисторов переключается с несущей частотой. Длительность управляющих импульсов формируется таким же образом, как и в предыдущем случае, в результате сравнения опорного напряжения и модулирующего сигнала. Формирование импульса на выходе инвертора, например, положительной полярности, обеспечивается при одновременном включении транзисторов VT1 и VT2. Поскольку транзистор VT2 переключается с высокой частотой, то при его выключении транзистор VT1 остается включенным, что приводит к замыканию тока нагрузки, запасенного в индуктивности, через транзистор VT1 и диод VD3. При этом на выходе инвертора напряжение равно сумме падений напряжения на транзисторе и диоде, т.е. близко к нулю. Аналогично создается нулевая полочка и при формировании отрицательной полуволны гладкой составляющей: при выключении транзистора VT3 ток нагрузки замыкается через транзистор VT4 и диод VD2. Таким образом, полярность гладкой составляющей выходного напряжения определяется включением транзисторов VT1 или VT4, а высокочастотное заполнение и, соответственно, форма гладкой составляющей - переключением транзисторов VT2 или VT3.
и т.д., а вторая пара транзисторов переключается с несущей частотой. Длительность управляющих импульсов формируется таким же образом, как и в предыдущем случае, в результате сравнения опорного напряжения и модулирующего сигнала. Формирование импульса на выходе инвертора, например, положительной полярности, обеспечивается при одновременном включении транзисторов VT1 и VT2. Поскольку транзистор VT2 переключается с высокой частотой, то при его выключении транзистор VT1 остается включенным, что приводит к замыканию тока нагрузки, запасенного в индуктивности, через транзистор VT1 и диод VD3. При этом на выходе инвертора напряжение равно сумме падений напряжения на транзисторе и диоде, т.е. близко к нулю. Аналогично создается нулевая полочка и при формировании отрицательной полуволны гладкой составляющей: при выключении транзистора VT3 ток нагрузки замыкается через транзистор VT4 и диод VD2. Таким образом, полярность гладкой составляющей выходного напряжения определяется включением транзисторов VT1 или VT4, а высокочастотное заполнение и, соответственно, форма гладкой составляющей - переключением транзисторов VT2 или VT3.
Основным преимуществом однополярной модуляции, по сравнению с двуполярной, является уменьшение амплитуд высокочастотных гармоник.
Следует отметить, что однополярная модуляция в некоторых схемах, например, в однофазной полумостовой, невозможна. В этом случае для реализации однополярной модуляции приходится использовать более сложные схемы, например, схему, показанную на рисунке 4.7.
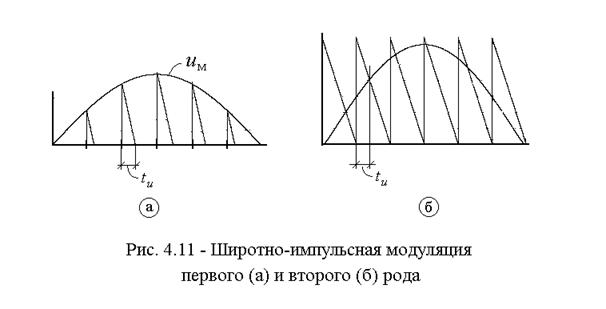
По способу формирования длительности высокочастотных импульсов различают несколько родов широтно-импулсной модуляции, наиболее распространенными из которых является ШИМ первого и второго рода. При широтно-импульсной модуляции первого рода (ШИМ-1) длительность формируемого импульса пропорциональна значениям модулирующего сигнала, выбираемым в определенные, наперед заданные моменты времени. Принцип формирования длительности импульсов при ШИМ-1 проиллюстрирован на рис. 4.11(а).
Принцип формирования длительности импульсов при ШИМ-2 показан на рис. 4.11(б). В этом случае длительность импульса определяется значением модулирующего сигнала в момент окончания импульса.
По способу изменения длительности различают одностороннюю и двустороннюю модуляцию. Например, на рис. 4.9 показана одно-
сторонняя модуляция, так как при изменении модулирующего сигнала изменяется момент выработки только заднего фронта импульса. Соответственно, на рис. 4.10 показан пример двусторонней модуляции.
Отношение величины несущей частоты к частоте модулирующего сигнала называется кратностью несущей частоты. Кратность может быть как целым числом, так и дробным, причем в общем случае кратность может быть и иррациональной дробью. Кратность существенно влияет на спектральный состав выходного напряжения, причем при дробно-рациональных кратностях в спектре выходного напряжения появляются гармоники с частотой ниже частоты модулирующего сигнала [4]. Такие гармоники называются субгармониками, и их амплитуды растут при уменьшении кратности несущей частоты, что может приводить к нарушению нормальной работы инвертора. Для подавления субгармоник следует увеличивать кратность несущей частоты, однако при этом неизбежно увеличиваются коммутационные потери в силовых приборах инвертора.
Полезная составляющая выходного напряжения определяется формой гладкой составляющей, которая в свою очередь зависит от формы модулирующего сигнала или, как это принято называть, от закона модуляции. В настоящее время чаще всего используется модуляция по синусоидальному, трапецеидальному или прямоугольному закону. В частности, рассмотренный выше способ широтно-импульсного регулирования на несущей частоте является ничем иным, как применением ШИМ по прямоугольному закону.
|
|
|
|
|
Дата добавления: 2015-05-06; Просмотров: 2730; Нарушение авторских прав?; Мы поможем в написании вашей работы!