КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Исходные данные. 8 страница
|
|
|
|
Кп1=2/[(1*2)2-1]=0,67.
Сравнивая двухполупериодную схему выпрямления с однополупериодной, можно сделать следующие выводы:
* в двухполупериодной схеме гораздо лучше используется трансформатор,
* среднее и максимальное значение тока диода уменьшается в 2 раза при одном и том же токе нагрузки,
* меньше коэффициент пульсации.
Однофазный двухполупериодный выпрямитель.
|

|
Одна из диагоналей моста присоединена к вентильной обмотке трансформатора, вторая диагональ- на нагрузку Rd.
Кривая напряжения вентильной обмотки трансформатора приведена на рисунке. В первый полупериод синусоидального напряжения, когда в точке1- положительный, а в точке 2- отрицательный потенциал, ток протекает через диод VD1, сопротивление Rd и диод VD3. Диоды VD2 и VD1 в этот момент тока не пропускают и находятся под обратным напряжением. Во второй полупериод, когда точка 1 вентильной обмотки находится под отрицательным потенциалом, а точка2 под положительным, ток протекает через диод VD2, сопротивление нагрузки Rd и диод VD4. Диоды VD1 и VD3 в этот полупериод тока не пропускают. Таким образом, токи текущие через нагрузку Rd совпадают по направлению, так же как и в выпрямителе со средней точкой. Соотношения те же:
Ud=0,9U2 или U2=1,11Ud.
Максимальное обратное напряжение на диоде Uобр мах=  U2=1,5Ud, то есть обратное напряжение в мостовой схеме в два раза меньше, чем в двухполупериодной с нулевой точкой.
U2=1,5Ud, то есть обратное напряжение в мостовой схеме в два раза меньше, чем в двухполупериодной с нулевой точкой.
Выпрямленный ток в данной схеме в отличие от двухполупериодного выпрямителя с общей точкой протекает в течении обеих периодов то в одном, то в другом направлении. Анодный ток диода Iа в два раза меньше среднего значения выпрямленного тока Id, то есть Id=2Iа, а действующее значение тока вентильной обмотки трансформатора по отношению к постоянной составляющей тока нагрузки определяется выражением:
I2=I2мах =1,11Id.
Недостатком мостовой схемы является наличие 4- х диодов. Но используются низковольтные диоды, то их выпрямители со средней точкой нужно использовать по два в плечо, так как в нем Uобр в 2 раза больше, чем в мостовой.
Трехфазный выпрямитель с нулевой точкой.
Для выпрямления трехфазного тока применяются мостовые и нулевые схемы. В нулевых схемах диод включают на фазное напряжение между фазой и нулем через приемник энергии, в мостовых схемах- на междуфазное напряжение.
Трехфазная схемы выпрямления с нулевой точкой состоит из трансформатора Т и трех диодов.
|
Сетевая обмотка трансформатора может быть соединена в звезду или треугольник, вентильная- только в звезду. Катоды диодов VD1- VD3 соединенные между собой, имеют положительный потенциал по отношению к нагрузке Rd, на нулевой точке трансформатора- отрицательный потенциал. В данной схеме в любой момент времени ток протекает через тот диод, к катоду которого приложен наиболее высокий положительный потенциал. В проводящем состоянии диода потенциал катода равен положительному потенциалу анода, т.к. сопротивление диода и падение напряжения на нем равно нулю, поэтому наличие на аноде какого- либо диода более высокого потенциала, чем у работающего (имеющего в данный момент так же положительный потенциал), приводит к запиранию его обратным (положительным) напряжением, поступающим на его катод от катода диода с более высоким положительным потенциалом на аноде.
Трехфазная мостовая схема выпрямления.
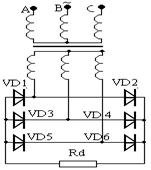
|
|
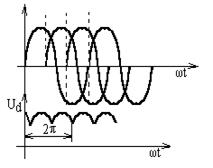
Трехфазная мостовая схема выпрямления состоит из шести диодов и нагрузки Rd. Диоды объединены в две группы: анодную- с объединенными анодами VD1, VD3, VD5 и катодную- с объединенными катодами VD2, VD4 и VD6.
В рассматриваемой схеме в каждый момент времени работают два диода: один из катодной группы и один из анодной.
В катодной группе ток проводит тот диод, на аноде которого положительный потенциал в данный момент времени является наибольшим. В анодной группе ток проводит тот диод, катод которого в данный момент времени обладает наибольшим отрицательным потенциалом.
Положительные полуволны синусоид выпрямляются диодами катодной группы, так как это направление напряжения является для них проводящим. Отрицательные полуволны выпрямляются вентилями анодной группы. Следовательно, к нагрузке прикладывается сумма выпрямленных напряжений катодной и анодной групп.
СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ И ТОКА.
Стабилизатором называют устройство автоматически обеспечивающее поддержание напряжения нагрузочного устройства с заданной степенью точности.
Напряжение на нагрузке может меняться не только при изменении нагрузочного тока, но из- за воздействия других дестабилизирующих факторов.
Среди них определяющими являются:
* колебания напряжения сети +5…-15%;
* изменение температуры окружающей среды;
* колебания частоты.
Современная электронная аппаратура может нормально функционировать при нестабильности питающего напряжения 0,1-3%, а для таких устройств, как УПТ, эта нестабильность должна быть еще ниже, не должна превышать 10-4 %.
По способу стабилизации бывают параметрические и компенсационные стабилизаторы.
Основным параметром характеризующим работу стабилизатора является коэффициент стабилизации:
Параметрический стабилизатор.
|
С помощью такого стабилизатора можно получать стабильное напряжение от нескольких вольт до нескольких сотен вольт при токе от единиц миллиампер до единиц ампер.
Последовательно со стабилитроном для создания требуемого режима работы включают балластный резистор Rб. Принцип работы параметрического стабилизатора показан на вольт- амперной характеристике балластного резистора Rб.
Uвх1=Uст1+RбIст2.
При увеличении напряжения Uвх1 на DUвх, например, из- за повышения напряжения сети, вольт- амперная характеристика резистора Rб переместится параллельно самой себе и займет положение2.
Из рисунка видно, что напряжение Uст2 мало отличается от напряжения Uст1, то есть практически напряжение на стабилитроне и на нагрузочном резисторе Rн остается неизменным.
Для нормальной работы параметрического стабилизатора сопротивление резистора должно быть таким, чтобы его вольт- амперная характеристика пересекала ВАХ стабилитрона в точке А, соответствующей номинальному току стабилитрона Iст ном, значение которого указанно в паспортных данных стабилитрона.
Коэффициент стабилизации параметрического стабилизатора напряжения на полупроводниковых стабилитронах может достигать от 30 до 50.
К основным достоинствам следует отнести простоту схемы и надежность работы.
К недостаткам- низкий КПД, не более 3%, большое внутреннее сопротивление стабилизатора (5…20 Ом), а так же узкий и нерегулируемый диапазон стабилизации.
В параметрических стабилизаторах тока нелинейный элемент включают последовательно с нагрузочным сопротивлением.

|
В параметрических стабилизаторах тока в качестве нелинейного элемента используют биполярные и полевые транзисторы.
Компенсационные стабилизаторы.
Эти стабилизаторы являются системами автоматического регулирования, в которых благодаря наличию отрицательной обратной связи обеспечивается постоянство напряжения и тока на нагрузочном устройстве с высокой степенью точности. Компенсационные стабилизаторы лишены недостатков, свойственных параметрическим стабилизаторам, что достигается усложнением их схемы.
|
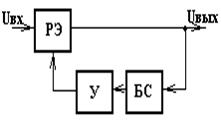
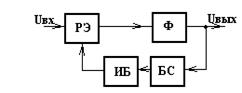
Компенсационные стабилизаторы подразделяют на стабилизаторы непрерывного действия и импульсные.
Любой компенсационный стабилизатор состоит из блока сравнения (БС), в который входит источник опорного напряжения (параметрический стабилизатор) и резистивный делитель, усилителя постоянного тока (У) и регулирующего элемента (РЭ).
|
Здесь изображена схема компенсационного стабилизатора на дискретных пролупроводниковых приборах. В этом стабилизаторе в блок сравнения (БС) входит параметрический стабилизатор, состоящий из стабилитрона Д и резистора R5, и резистивный делитель R1R2R3. Усилителем постоянного тока является усилитель на транзисторе Т2 и резисторе Rк. В качестве регулирующего элемента используется мощный транзистор Т1.
В рассматриваемом компенсационном стабилизаторе происходит непрерывное сравнение напряжения на нагрузочном резисторе Uн (или части его) с опорным напряжением Uоп.
При увеличении входного напряжения стабилизатора или уменьшении нагрузочного тока Iн, напряжение Uн повышается, отклоняясь от номинального значения. Часть напряжения равная bUн (b- коэффициент деления резистивного делителя), являющаяся сигналом обратной связи, сравнивается с опорным напряжением Uоп, т.к. опорное напряжение остается постоянным, то напряжение между базой и эмиттером транзистора Т2 из- за увеличения напряжения bUн уменьшается. Следовательно, коллекторный ток транзистора Т2 снижается. Это приводит к уменьшению напряжения между базой и коллектором транзистора Т1, что равносильно увеличению его сопротивления. В следствии этого падение напряжения на транзисторе Т1 возрастает, благодаря чему напряжение Uн приобретает значение близкое к номинальному с определенной степенью точности. С помощью переменного резистора R2 осуществляется регулирование напряжения Uн.
В современных стабилизаторах на интегральных микросхемах для повышения коэффициента стабилизации вместо усилителя на транзисторе Т2 применяют интегральный операционный усилитель. Это позволяет получить коэффициент стабилизации равный нескольким тысячам. В таком стабилизаторе помимо уменьшения медленных изменений выходных напряжений, снижаются и пульсации за счет уменьшения переменных составляющих выходного напряжения.
К достоинствам компенсационных стабилизаторов относят:
* высокий коэффициент стабилизации К>100;
* низкое внутреннее сопротивление Riст=10-3…10-4 Ом;
* практическая безинерционность;
* отсутствие собственных помех.
К недостаткам относятся:
* невысокий КПД, не превышающий 0,5…0,6;
* значительная масса из- за необходимости применения радиатора на регулирующем транзисторе при стабилизации больших токов.
В отечественной аппаратуре наиболее широкое распространение получил стабилизатор на микросхемах серий К142, К275, К181, которые оснащены схемами защиты от перегрузок и короткого замыкания.
Импульсные стабилизаторы постоянного напряжения (ИСПН)
Получают все большее распространение из- за высокого КПД, достигающего 0,8…0,85, меньшие габариты и массу.
|
Так же, как и в компенсационном стабилизаторе, в нем применяется отрицательная обратная связь, ослабляющая изменение выходного напряжения или нагрузочного тока. Отличием ИСПН от компенсационных стабилизаторов является работа регулирующего элемента РЭ- транзистора в режиме ключа, когда транзистор либо открыт, либо закрыт. Именно режим ключа позволяет получать очень высокий КПД.
Работа регулирующего транзистора в режиме ключа дает возможность получить с его выхода однополярные импульсы прямоугольной формы. Для последующего преобразования таких импульсов в постоянное напряжение служит сглаживающий фильтр Ф. Регулирующий элемент и сглаживающий фильтр охвачены отрицательной обратной связью, которую осуществляют блок сравнения БС и импульсный блок ИС. В блоке сравнения выходное напряжение сравнивается с эталонным (опорным) напряжением. Получающаяся при этом разность напряжений воздействует на импульсный блок, который вырабатывает управляющие импульсы разной длительности или частоты следования, удовлетворяющие работе регулирующего элемента.
Импульсные стабилизаторы постоянного напряжения по способу управления регулирующего элемента подразделяются на стабилизаторы с частотно- импульсной модуляцией и широтно- импульсной модуляцией (ШИМ).
Рассмотрим работу ИСПН на примере релейного стабилизатора. В этом стабилизаторе в блоке сравнения функции сравнения эталонного (опорного) напряжения с выходным напряжением стабилизатора совмещены с функциями релейного устройства, те и другие функции выполняет стабилитрон Д1.
Релейное устройство через транзисторы Т3, Т2, принадлежащие импульсному блоку, управляет регулирующим элементом- транзистором Т1. В качестве сглаживающего фильтра чаще всего используются Г- образные LC- фильтры.
Релейный стабилизатор работает таким образом. При подаче постоянного входного напряжения Uвх регулирующий транзистор Т1 открывается. Благодаря наличию индуктивной катушки Lф, ток через которую не может изменяться скачком, напряжение на выходе стабилизатора будет постепенно увеличиваться, bUвых, где b- коэффициент деления делителя R8R9R10. При некотором значении этого напряжения стабилитрон Д1 открывается, что приводит к отпиранию транзистора Т3 и запиранию транзистора Т2, так как транзистор Т3 закрывает его вход. В свою очередь, транзистор Т2 запирает регулирующий транзистор Т1. После этого, напряжение на выходе стабилизатора и в блоке сравнения начинает уменьшаться. При определенном значении bUвых стабилитрон Д1 закрывается, что приводит к запиранию транзистора Т3 и отпиранию транзисторов Т2 и Т1. Далее процесс повторяется.
Изменения выходного напряжения из- за воздействия дестабилизирующих факторов приводят к соответствующим изменениям длительности закрытого и открытого состояний регулирующего транзистора Т1, в результате, среднее значение выходного напряжения будет поддерживаться с определенной степенью точности.
Стабилитрон Д2- для шунтирования обратного выброса ЭДС.
Основным преимуществом всех релейных ИСПН является их высокое быстродействие, а существенным недостатком- относительно большая амплитуда пульсаций выходного напряжения. Эти пульсации невозможно свести к нулю, т.к. переключение релейных элементов возможно только при изменениях выходного напряжения.
Стабилизаторы с ШИМ.
Существует два типа стабилизаторов с ШИМ.
|
В первом из них, структурная схема состоит из генератора импульсов ГИ, длительность импульсов изменяется в зависимости от постоянного напряжения, подаваемого на ГИ с выхода блока сравнения БС.
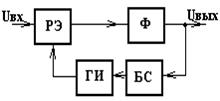
|
В стабилизаторах второго типа генератором импульсов ГИ является генератор линейно изменяющегося напряжения ГЛИН, у которого пилообразные импульсы Uг генерируются с постоянной частотой повторения.
|
Напряжение DU=Uоп-bUвых в блоке сравнения непрерывно сравнивается с линейно изменяющимся напряжением Uг(t). Таким образом, управляющие импульсы Uу имеют разную длительность импульсов. Под воздействием управляющих импульсов регулирующий элемент РЭ в стабилизаторах с ШИМ переключается в зависимости от длительности импульсов, т.е. пауз изменения среднего значения напряжения на выходе фильтра, в результате чего обеспечивается постоянство выходного напряжения стабилизатора в заданных пределах.
МОДУЛЯЦИЯ.
Амплитудная модуляция.
Модуляцией колебаний называется медленное по сравнению с периодом колебаний изменение амплитуды, фазы или частоты колебаний по определенному закону.
Такое изменение осуществляется для того, чтобы с помощью несущего колебания передавать информацию. Несущие колебания характеризуются амплитудой, частотой или фазой. Соответственно различают три основных вида модуляции: амплитудную, частотную и фазовую.
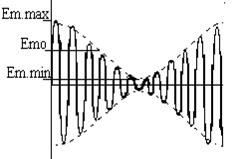
При амплитудной модуляции косинусоидальным сигналом модулированное колебание e(t) имеет вид:
e(t)=Emo(1+mCOSWt)COSwot, (***)
где Emo- амплитуда несущего колебания.
|
Максимальное и минимальное значение амплитуды:
Em max=Emo(1+m),
Em min=Emo(1-m).
Коэффициент амплитудной модуляции есть отношение разности между максимальной и минимальной амплитудой к их сумме:
m=(Em max- Em min)/(Em max+ Em min).
Из выражения (***) видно, что для осуществления амплитудной модуляции необходимо перемножение несущего и модулирующего колебаний.
Это можно сделать как с помощью линейных, так и не линейных преобразований.
|
В этой схеме модуляция осуществляется подачей модулирующего колебания на базу.
Модуляция может осуществляться путем подачи модулирующего колебания на коллектор или эмиттер транзистора, но эти способы требуют больше мощности от источника модулирующего сигнала.

Импульсные способы передачи информации.
Современная автоматика широко использует напряжения и токи имеющие импульсный характер:
* многие производственные процессы имеют импульсный характер: пуск и остановка агрегатов, изменение скорости и торможение, сброс нагрузки, срабатывание защиты и т.д.
* большинство технологических процессов разбивается на ряд операций (тактов), и их чередование так же обуславливает импульсный характер работы устройств.
* передача информации в вид импульсов, разделенных паузами, позволяет уменьшать мощность, потребляемую от источника питания, при сохранении достаточной мощности импульса. Это особенно важно при использовании источников питания ограниченной мощности (батареи, аккумуляторы), например, на подвижных объектах.
* передача информации в виде импульсов позволяет значительно разгрузить каналы связи. Так, например, информацию о температуре сталеплавильной печи нет необходимости передавать непрерывно, т.к. температура меняется сравнительно медленно.
* передача информации в импульсной форме позволяет значительно повысить помехоустойчивость, точность и надежность электронных устройств. При подаче непрерывных сигналов точность снижается из- за существования дрейфа нуля усилителей.
Существует много способов передачи непрерывного сигнала импульсными методами.
|
При осуществлении амплитудно- импульсной модуляции (АИМ) амплитуда импульсов пропорциональна входному сигналу. При таком способе передачи информации вредное влияние дрейфа нуля усилителей сохраняется.
При использовании широтно- импульсной модуляции (ШИМ) амплитуда и частота повторения импульсов постоянны, но ширина импульса tи пропорциональна текущему значению входного сигнала.
При частотно- импульсной модуляции (ЧИМ) входной сигнал определяет частоту следования импульсов, которые имеют постоянную длительность и амплитуду.
При ШИМ и ЧИМ дрейф нуля усилителей не влияет на точность передачи входного сигнала, которая в данном случае зависит только от точности фиксации временного положения импульсов.
Наибольшую точность и помехоустойчивость обеспечивают число- импульсные методы: информация передается в виде числа, которому соответствует определенный набор импульсов (код), при этом существенно только наличие или отсутствие импульса.
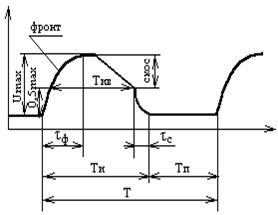
Импульсы прямоугольной формы наиболее часто применяются в электронной технике.
Вообще, импульс- это кратковременное отклонение напряжения или тока от некоторого исходного уровня, называемого основанием импульса.
Исходный уровень основания может иметь разные значения- нулевое, положительное или отрицательное. Длительность паузы (время между смежными импульсами) должно быть достаточным для возврата электрической цепи, находящейся под импульсным воздействием, в исходное состояние, при котором цепь находилась непосредственно перед началом очередного импульсного воздействия.
|
Импульс имеет следующие характерные параметры:
* форма,
* амплитуда Uмах или Iмах,
* полярность,
* полная Ти и активная Тиа длительности импульсов,
* длительность фронта tф и среза tс,
* период следования Т или частота повторения f.
Дополнительными параметрами являются:
n крутизна фронта или среза,
n скважность импульса.
Активная длительность импульса Тиа соответствует интервалу времени на уровне половины амплитуды сигнала.
Крутизна фронта представляет собой отношение Sф=Uмах/tф, а крутизна среза Sс=Uмах/tс.
Скважность импульса s представляет собой отношение периода Т к длительности импульса tи, т.о. s всегда больше 1.
Частота повторения импульсов является величиной, обратной периоду f=1/Т.
По форме импульсы бывают прямоугольными, треугольными, трапецеидальными, зкспоненциальными и т.д. В автоматике наибольшее распространение получили прямоугольные импульсы. Прямоугольный импульс определяют как импульс с бесконечно большой крутизной, состоящий из двух перепадов: положительного и отрицательного.
По полярности различают импульсы положительные, отрицательные и двухсторонние. В ряде случаев полярность импульсов условна, что зависит от уровня их основания.
Формирователи импульсов.
Формирование импульсов основано на изменении одного или нескольких параметров импульсов, поступающих на вход устройства формирования от какого- либо источника.
Формирователь может быть пассивным или активным четырехполюсником.
Различают линейные и нелинейные схемы. В первом случае используются только линейные элементы электрических цепей: R, L и С. Во втором случае- нелинейные элементы- диоды, транзисторы, микросхемы.
Дифференцирующие цепи.
Являются простейшими формирователями импульсов.
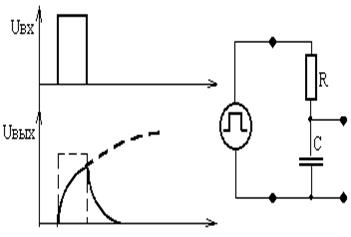
Дифференцирующие цепи это такие цепи, у которых постоянная времени (t=RC) значительно меньше длительности входных импульсов, а выходное напряжение снимается с активного сопротивления.
Рассмотрим процесс воздействия прямоугольного входного импульса на RC- дифференцирующую цепь.

|
При подаче Uвх, через RC- цепь протекает ток заряда iз и напряжение на конденсаторе Uс возрастает по экспоненциальной кривой:
 ,
,
Разряд конденсатора происходит согласно уравнению:
 .
.
Ток в цепи RC изменяется скачкообразно до максимума в моменты образования перепадов напряжения на входе и затем спадает по экспоненте, стремясь к нулю. Направление тока зависит от характера процесса. Кривая напряжения на резисторе будет иметь ту же форму, что и кривая тока в цепи. При этом, если потенциал нижнего вывода с резистора R фиксирован на нулевом уровне, как в нашем случае, то потенциал выходного зажима будет отклоняться от этого уровня в положительном направлении в момент заряда и в отрицательном в момент разряда конденсатора.
Ток конденсатора дифференцирующей цепи связан с напряжением на нем выражением:  .
.
Напряжение на резисторе R (оно же и выходное):  .
.
Дифференцирующие цепи находят широкое применение в импульсных схемах для формирования коротких сигналов экспоненциальной формы, которыми осуществляется управление электронными переключающими устройствами.
Интегрирующие цепи.
Интегрирующей называется такая цепь, у которой постоянная времени (t=RC) во много раз больше длительности входных импульсов, а выходное напряжение образуется на конденсаторе.
|
Для схемы, приведенной на рисунке, выходное напряжение образуется на конденсаторе:
 .
.
Согласно закону Ома, для участка последовательной цепи, ток:
iC=iR=UR/R,
следовательно,
При условии t>>Ти напряжение Uс за время действия входного импульса возрастает незначительно, поэтому им можно пренебречь и считать Uвх»UR в интервале от t1 до t2, в этом случае формулу можно записать:
 ,
,
то есть в интервале соответствующего промежутка времени выходное напряжение пропорционально интегралу от входного напряжения, что и определило название цепи. Как видно из рисунка, амплитуда выходного напряжения Uвых пропорциональна длительности прямоугольного импульса, поступающего на вход интегрирующей цепи.
Большим недостатком этой схемы является то, что по окончании входного импульса требуется довольно большое время Т=(3¸5)t>>Тн для возврата интегрирующей цепи в исходное состояние.
При импульсах, разделенных паузами небольшой продолжительности необходим быстрый возврат интегрирующей цепи в исходное состояние.
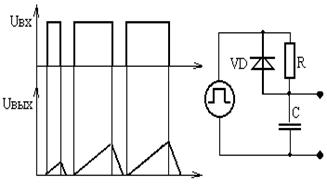
Для выполнения этого требования применяют шунтирование резистора R диодом VD.
|
Интегрирующие цепи применяются главным образом для подавления коротких импульсных помех значительной амплитуды, кроме того, эти цепи, обладая способностью переводить разницу длительностей входных импульсов, могут быть использованы для селекции импульсов по длительности.
Дифференциальные трансформаторы.
Те же функции, что и дифференцирующие цепи, может выполнять дифференцирующий трансформатор, при этом он изменяет соотношение между амплитудами входных и выходных напряжений, а так же полярность выходных импульсов.
Процессы, происходящие в дифференцирующем трансформаторе значительно сложнее процессов, происходящих в дифференцирующих RC- цепях, поэтому рассмотрим только качественную сторону явлений.
|
Перепад напряжений, поступающих на входной зажим, вызывает в трансформаторе возникновение неустановившегося режима, характер и длительность которого зависит от ряда факторов: индуктивности намагничивания трансформатора, индуктивности рассеяния, емкости между обмотками, а так же параметров обмотки.
|
|
|
|
|
Дата добавления: 2015-05-06; Просмотров: 997; Нарушение авторских прав?; Мы поможем в написании вашей работы!