КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Построение профиля кулачка
|
|
|
|
Определение полярных координат профиля кулачка
Аналитический расчет основных размеров механизма
Аналитически минимальный радиус кулачка определяется из той же диаграммы  по формуле:
по формуле:  где
где  - минимальное значение аналога ускорения толкателя, Sc – перемещение толкателя в том положении, в котором
- минимальное значение аналога ускорения толкателя, Sc – перемещение толкателя в том положении, в котором  Тогда:
Тогда: 
Сравним результаты расчетов, полученные графическим и аналитическим методами.
Таблица 5.4 – Сравнение результатов.
| Графический метод | Аналитический метод | |

| 0,08 | 0,0831 |
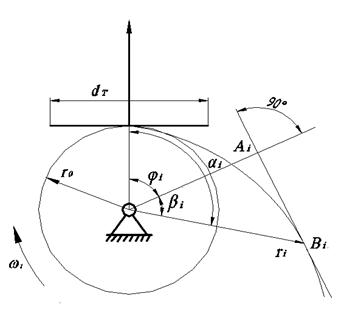
Рисунок 5.2 – Расчетная схема для определения полярных координат точек профиля
На основании этой схемы радиус-вектор профиля кулачка равен:

Полярный угол:

где

причем при удалении  , а при возвращении
, а при возвращении  .
.
Выполняем расчет полярных координат для контрольных положений 3 и 16.

 º,
º,
 º,
º,


Профиль кулачка строим следующим образом. Проводим окружность радиуса r0 и через ее центр O линию движения толкателя, на которой наносим разметку хода толкателя в соответствии с графиком ST (φ1) – точки A1, A3, A5 и т. д. Используя метод обращения движения, от линии движения толкателя в направлении, противоположном вращению кулачка, откладываем фазовые углы φУ, φДС, φВ. Дуги, стягивающие углы φУ и φВ, делим на 12 равных частей в соответствии с графиком ST (φ1) и отмечаем точки C3, C5 и т. д. Из этих точек проводим лучи в центр O, а из точек A3, A5, A7 … проводим дуги с центром в точке O до пересечения с соответствующими лучами. Из точек пересечения проводим перпендикуляры к лучам. Эти перпендикуляры определяют положения плоскости толкателя в обращенном движении. На них откладываем отрезки, равные соответствующим аналогам скоростей S’Ti, получая точки B’3, B’5 и т. д. Соединив их плавной кривой, получаем профиль кулачка.
|
|
|
|
|
Дата добавления: 2015-03-29; Просмотров: 452; Нарушение авторских прав?; Мы поможем в написании вашей работы!