КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Индуктивные датчики перемещения
|
|
|
|
Потенциометрические датчики перемещения
Датчик данного типа в своей основе имеет электрический контур, содержащий потенциометр (Рисунок 11). Линейное перемещение объекта приводит к изменению сопротивления потенциометра (переменного резистора). Если через потенциометр пропускать постоянный ток, то падение напряжения на нём будет пропорционально величине сопротивления, и, следовательно, величине линейного перемещения интересующего объекта.
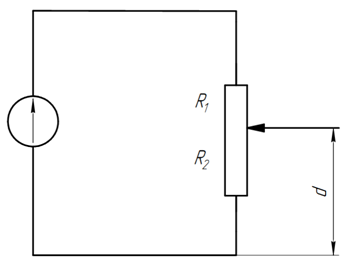
Рисунок 11. Потенциометрический датчик перемещения.
В одной из конфигураций датчика данного типа чувствительным элементом является трансформатор с подвижным сердечником. Перемещение внешнего объекта приводит к перемещению сердечника, что вызывает изменение потокосцепления между первичной и вторичной обмотками трансформатора (Рисунок 5). Поскольку амплитуда сигнала во вторичной обмотке зависит от потокосцепления, по величине амплитуды вторичной обмотки можно судить о положении сердечника, а значит и о положении внешнего объекта.
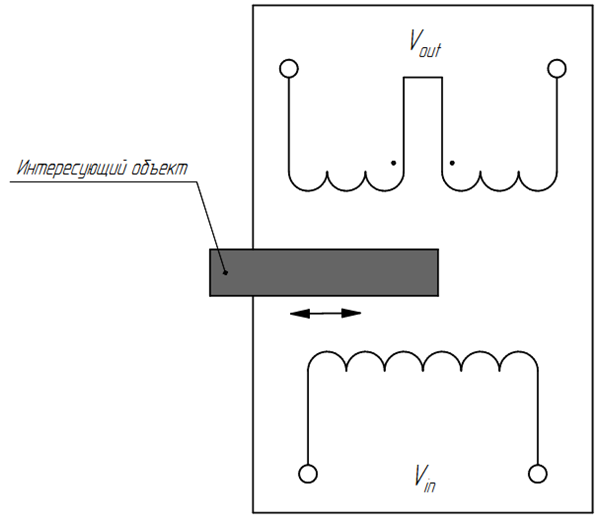
Рисунок 5. Индуктивный датчик перемещения на трансформаторе.
Другая конфигурация имеет более простую схему, однако она пригодна лишь для небольшого количества приложений, где требуется определять незначительные перемещения или вибрации объектов, состоящих из ферромагнитного материала. В данной схеме интересующий ферромагнитный объект играет роль магнитопровода, положение которого влияет на индуктивность измерительной катушки (Рисунок 6).
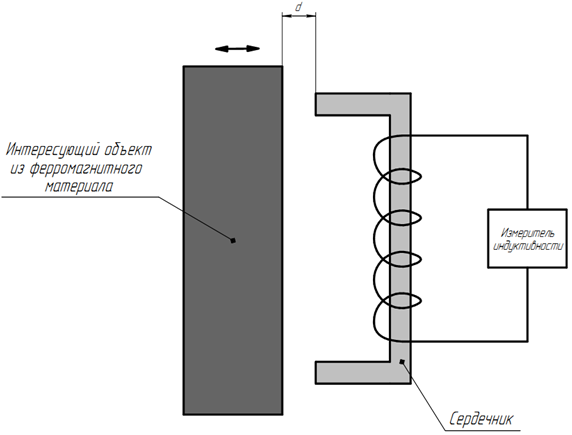
Рисунок 6. Индуктивный датчик перемещения для объектов из ферромагнитных материалов.
12) Частотный_преобразователь — электронное устройство_для_изменения частоты электрического тока (напряжения)
НАЗНАЧЕНИЕ.
Частотный преобразователь служит для плавного регулирования скорости асинхронного электродвигателя или синхронного двигателя за счет создания на выходе преобразователя электрического напряжения заданной частоты. В простейших случаях регулирование частоты и напряжения происходит в соответствии с заданной характеристикой V/f, в наиболее совершенных преобразователях реализовано так называемое векторное управление. Частотный преобразователь — это устройство, состоящее из выпрямителя (моста постоянного тока), преобразующего переменный ток промышленной частоты в постоянный, и инвертора (преобразователя) (иногда с ШИМ), преобразующего постоянный ток в переменный требуемых частоты и амплитуды. Выходные тиристоры (GTO) или транзисторы (IGBT) обеспечивают необходимый ток для питания электродвигателя. Для улучшения формы выходного напряжения между преобразователем и двигателем иногда ставят дроссель, а для уменьшения электромагнитных помех — EMC-фильтр.
Преобразователь частоты состоит из электрического привода и управляющей части. Электрический привод частотного преобразователя состоит из схем, в состав которых входиттиристор или транзистор, которые работают в режиме электронных ключей. В основе управляющей части находится микропроцессор, который обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
В зависимости от структуры и принципа работы электрического привода выделяют два класса преобразователей частоты:
1. С непосредственной связью.
2. С явно выраженным промежуточным звеном постоянного тока.
Каждый из существующих классов преобразователей имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
В преобразователях с непосредственной связью электрический привод представляет собой управляемый выпрямитель. Система управления поочередно отпирает группы тиристоров и подключает статорные обмотки двигателя к питающей сети. Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. Частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие - малый диапазон управления частотой вращения двигателя (не более 1: 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование незапираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя. «Резаная» синусоида на выходе преобразователя с непосредственной связью является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению КПД системы в целом.
Наиболее широкое применение в современных частотно регулируемых приводах находят преобразователи с явно выраженным звеном постоянного тока. В преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе, фильтруется фильтром, сглаживается, а затем вновь преобразуется инвертором в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению КПД и к некоторому ухудшению массо-габаритных показателей по отношению к преобразователям с непосредственной связью.
Для формирования синусоидального переменного напряжения используют автономный инвертор, который формирует электрическое напряжение заданной формы на обмотках электродвигателя (как правило, методом широтно-импульсной модуляции). В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия. Они имеют более высокий КПД (до 98 %) по отношению к преобразователям на IGBT транзисторах.
Преобразователи частоты являются нелинейной нагрузкой, создающей токи высших гармоник в питающей сети, что приводит к ухудшению качества электроэнергии.
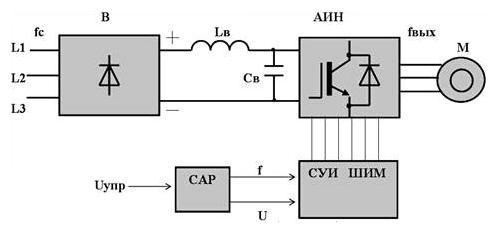
Преобразователь частоты состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора, системы управления ШИМ, системы автоматического регулирования, дросселя Lв и конденсатора фильтра Cв (рис.2). Регулирование выходной частоты fвых. и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления.
Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя.
Длительность этих состояний внутри периода ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи.
13) 
14) Датчик давления — устройство, физические параметры которого изменяются в зависимости от давления измеряемой среды (жидкости, газы, пар). В датчиках, давление измеряемой среды, преобразуется в унифицированный пневматический, электрический сигналы или цифровой код.
|
|
|
|
|
Дата добавления: 2015-04-23; Просмотров: 1565; Нарушение авторских прав?; Мы поможем в написании вашей работы!