КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Фоторезистори, принцип роботи
|
|
|
|
Фоторезистор, з*єднаний з відповідною схемою формування сигналу, є одним з найчутливіших давачів. Його дія заснована на явищі внутрішнього фотоефекту(вивільнення в матеріалі електричних зарядів під впливом оптичного потоку, за рахунок чого збільшується провідність).
Світлові характеристики фоторезисторів визначаються виразом
Іф=СUФγ,де С - коефіцієнт, який залежить від конкретного матеріалу, температури і спектра випромінювання; U - напруга на фоторезисторі; γ - коефіцієнт нелінійності, значення якого знаходиться в інтервалі від 0,5 до 1,0.
У цілому характеристики нелінійні, однак в межах зміни освітленості на одну декаду можливий вибір лінійних ділянок. Із зростанням напруг живлення фоторезистора форма кривих змінюється мало. Нахил характеристики, що визначає інтегральну чутливість, максимальний в тоні слабких освітленостей.
фоторезистори можна характеризувати також кратністю зміни опору, тобто відношенням темнового опору Rtemh до опору освітленого Rcbit- Значення коефіцієнта n може досягати декількох десятків тисяч, чим і пояснюється висока чутливість фоторезисторів. Різні типи фоторезисторів можуть працювати в діапазонах інфрачервоного, видимого і ультрафіолетового випромінювання.
Характеристики фоторезисторів істотно залежать від температури, І тому робочі температури обмежені значеннями -60°С і +60 °С. Із зростанням температури опір освітленого фоторезистора зростає.
Значення сталих часу, що характеризують швидкодію фоторезисторів, залежать від фоточутливого матеріалу і способу виготовлення.
Якщо на фоторезистор діє потік, який періодично змінюється, так що тривалість освітлення і затемнення стає порядку сталої часу, чутливість його зменшується.
Додаткове підсвічування, накладання варіацій освітленості на деяку середню освітленість, розширює частотну характеристику в ділянку високих частот.
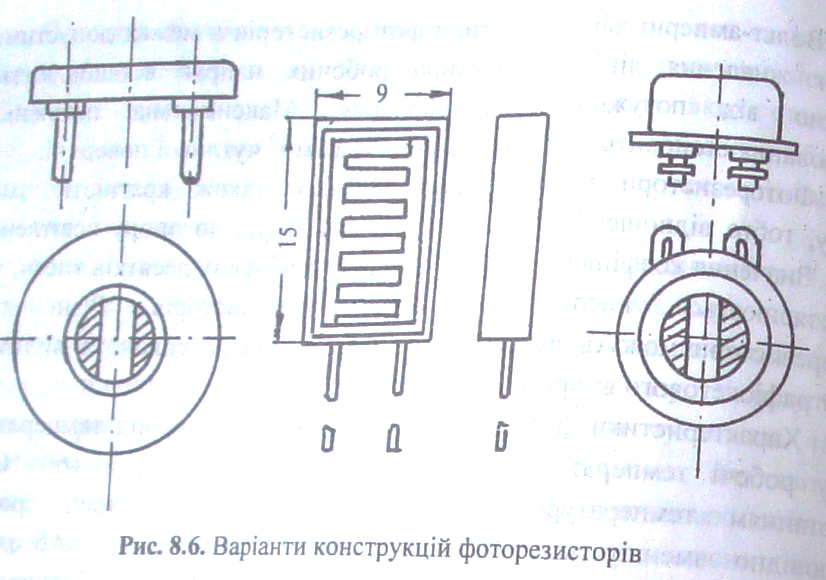 Конструктивно фоторезистори оформляються у пластикових або металоскляних герметизованих корпусах, що дає змогу використовувати їх в умовах підвищеної вологості, рідких непровідних середовищах Напівпровідниковий світлочутливий матеріал наноситься на ізолюючу підложку методом напилення у вакуумі і захищається прозорим вікном. Основними вимірювальними схемами з фоторезисторами є потенціометричні, мостові і диференціальні. Ці схеми можуть працювати як в неперервних режимах, так і в порогових, коли необхідно фіксувати тільки факт відхилення від заданого значення освітленості. За допомогою схем з операційними підсилювачами часто здійснюють перетворення опору фоторезистора у відповідну напругу.
Конструктивно фоторезистори оформляються у пластикових або металоскляних герметизованих корпусах, що дає змогу використовувати їх в умовах підвищеної вологості, рідких непровідних середовищах Напівпровідниковий світлочутливий матеріал наноситься на ізолюючу підложку методом напилення у вакуумі і захищається прозорим вікном. Основними вимірювальними схемами з фоторезисторами є потенціометричні, мостові і диференціальні. Ці схеми можуть працювати як в неперервних режимах, так і в порогових, коли необхідно фіксувати тільки факт відхилення від заданого значення освітленості. За допомогою схем з операційними підсилювачами часто здійснюють перетворення опору фоторезистора у відповідну напругу.
Сферу застосування оптичних давчів на фоторезисторах визначають гакі їх якості, як висока чутливість, малі габарити і маса, простота виготовлення, низька вартість. Вони входять до складу систем управління освітленням територій і приміщень, сигналізаторів вогню і диму, оптичних автоматів захисту робочих місць, тощо.
46. Давачі вологості, їх типи.
Вологість прийнято характеризувати рядом показників. Так, абсолютна вологсть визначає, яка кількість води міститься в 1м3 повіртя, а вологість насичення характеризує максимальну кількість води в грамах, що може бути в 1 м3 повітря без утворення конденсату. Відносна вологість є відсотковим відношенням абсолютної вологості до вологості насичення, тому вона також залежить від температури. При визначенні вологості оперують також таким показником, як температура точки роси. Це температура, до якої треба охолодити вологе повітря, щоб досягти насичення водяної пари.
Типи давачів вологості:
· конденсаційні
· сорбційні
· психрометричні
· імпедансні
Конденсаційні давачі вологості визначають точку роси газу шляхом вимірювання температури поверхні дзеркала, яке штучно охолоджується, в момент досягнення гідротермічної рівноваги між пароподібною і конденсованою фазами. Визначення абсолютної вологості здійснюється на основі температури роси. В інтервалі температур +50.. 80  похибка вимірювання становить 0,1 . Стала часу – від декількох секунд до хвилини. Перевага – застосування в корозійних середовищах. Недолік – складність, висока вартість.
похибка вимірювання становить 0,1 . Стала часу – від декількох секунд до хвилини. Перевага – застосування в корозійних середовищах. Недолік – складність, висока вартість.
У сорбційних давачах використовують два явища. Перше з них проявляється у тому, що при однаковій температурі тиск пари над насиченим розчином солі нижчий від тиску пари над чистою водою, а друге утому, що електропровідність кристалічної солі нижча від електропровідності розчину на три, чотири порядки. Зведена похибка 1 С, температури точки роси -40.. +65 С
Психрометричний ефект полягає в охолодженні зволоженої поверхні тіла, яке відбувається внаслідок випаровування з неї води. Давач на цьому явищі складається з двох термометрів: «вологого» і «сухого».
У імпеданс них давачах чутливим елементом є гігроскопічна речовина, у якої під впливом вологості змінюється електричний параметр (опір або ємність). Подібні чутливі елементи мють малі розміри і дають можливість проводити порівняно точні вимірювання з малою сталою часу. Похибка вимірювання 2.. 3 %, діапазон вимірювання відносної вологості – 5.. 100% для температур 40.. 80 С.
47. Підсилювальні елементи, загальні відомості, характеристики.
Елементи систем автоматики поділяються на групи: датчики(сенсори), виконавчі елементи та підсилювальні елементи. Підсилювальні елементи – це елементи, які служать для підсилення сигналів, отриманих в САК з чутливих елементів, або для керування виконавчими елементами. Наприклад: електронні підсилювачі, елекртомагнітні реле, магнітні підсилювачі, електромашинні підсилювачі. Основне призначення підсилювальних елементів – підсилення вхідного сигналу за потужністю(магнітний підсилювач, релейний, гідравлічний та інші).
ЕЛЕКТРОННІ ПІДСИЛЮВАЧІ
Підсилювачами називаються пристрої, призначені для збільшення значень параметрів електричних сигналів за рахунок енергії включеного джерела живлення. Підсилювачі застосовуються для переважного посилення значень тих або інших параметрів сигналів. За цією ознакою їх підрозділяють на підсилювачі напруги, токи й потужності.
У підсилювачах з лінійним режимом роботи перекручування форми посилюваного сигналу, що завжди можна представити сукупністю гармонік різної частоти, мінімальне. Перекручування сигналу буде мінімальним, якщо без перекручування будуть підсилюватися всі його гармонійніі тридцятилітні.
Властивість підсилювача збільшувати амплітуду гармонійнихих тридцятилітніх сигналу характеризує його амплітудно-частотна характеристика Типові значення нижньої й верхньої границь частот АЧХ підсилювачів різного типу наведені в. У підсилювачах з нелінійним режимом роботи при збільшенні значення напруги на вході більше деякого граничного рівня зміна напруги на його виході практично відсутній.
ЕЛЕКТРОМАШИННІ ПІДСИЛЮВАЧІ
Електромашинні підсилювачі (ЕМП) – це спеціальні електричні генератори (частіше постійного, рідше змінного струму), вихідна потужність яких регулюється зміною потужності керування (збудження), в багато раз меншої вихідної потужності.
За родом струму їх можна розділити на ЕМП постійного і змінного струму.
За числом ступенів підсилення – на одно-, двох- і триступінчаті.
За напрямком потоку збудження вихідного ступеня – на ЕМП поздовжнього і поперечного поля.
ЕЛЕКТРОМАГНІТНІ ПІДСИЛЮВАЧІ
Магнітний підсилювач, підсилювач електричних сигналів, заснований на використанні властивою феромагнітним матеріалам нелінійної залежності магнітної індукції В від напруженості магнітного поля Н. Керованими елементами в М. в. є індуктивності котушки з феромагнітними сердечниками, в яких діють 2 змінних магнітних поля; одне змінюється з частотою джерела живлення, інше — з частотою підсилюваного сигналу.
48. Електромагнітні підсилювачі, принцип роботи, крива намагнічення сердечника.
Магнітним підсилювачем називають електромагнітний пристрій для плавного регулювання змінного струму, який поступає на навантаження, шляхом зміни індуктивного опору XL котушки з феромагнітним сердечником, ввімкненої послідовно з навантаженням. За допомогою такого пристрою можна керувати великими струмами через порівняно слабкі електричні сигнали. МП застосовують на тепловозах для автоматичного регулювання збудження головного генератора, для регулювання напруги джерела струму при заряджанні акумуляторних батарей, в стабілізаторах напруги і ін..
Робота магнітних підсилювачів заснована на використанні властивостей феромагнітних матеріалів. Якщо по обмотці, розташованій на осерді з феромагнітного матеріалу, протікає електричний струм, то в осерді виникає магнітне поле, яке характеризується напруженістю Н і магнітною індукцією В. Напруженість магнітного поля Н створюється струмом, що проходить по обмотці. Магнітна індукція В збільшується при зростанні напруженості Н. Крива, яка характеризує залежність магнітної індукції В від напруженості магнітного поля Н, називається кривою намагнічування феромагнітного матеріалу. Починаючи з деякого значення напруженості магнітного поля, подальше її збільшення практично не призводить до зміни магнітної індукції, магнітний матеріал досяг стану насичення. Максимальна індукція в осерді називається індукцією насичення ВS; напруженість поля при цьому дорівнює НS.
Якщо далі зменшувати напруженість поля, то зміна магнітної індукції відбувається за новою кривою. Індукція при цьому зменшується повільніше, ніж вона зростала при збільшенні Н від 0 до НS. При зменшенні напруженості магнітного поля до нуля індукція в осерді зберігає значення Вr, яке називається залишковою індукцією. При збільшенні напруженості магнітного поля в зворотному напрямку індукція зменшується до нуля при напруженості – НС, яка носить назву коерцитивної сили. Далі при значенні напруженості – Hs осердя знову насичується, індукція в ньому буде дорівнювати -Bs. Таким чином, зміна індукції в залежності від напруженості поля відбувається за графіком, який має вигляд петлі, що називається петлею гістерезису.
 Матеріали з широкою петлею гістерезису називаються магнітно-твердими, зазвичай, вони використовуються для постійних магнітів. Матеріали з вузькою петлею гістерезису називаються магнітно-м’якими і вони використовуються для осердь магнітних підсилювачів та інших електромагнітних приладів: реле, трансформаторів, електричних машин. Для пояснення принципу дії магнітного підсилювача можна знехтувати петлею гістерезису і вважати, що зміна магнітної індукції в залежності від напруженості відбувається по середній (основній) кривій намагнічування.
Матеріали з широкою петлею гістерезису називаються магнітно-твердими, зазвичай, вони використовуються для постійних магнітів. Матеріали з вузькою петлею гістерезису називаються магнітно-м’якими і вони використовуються для осердь магнітних підсилювачів та інших електромагнітних приладів: реле, трансформаторів, електричних машин. Для пояснення принципу дії магнітного підсилювача можна знехтувати петлею гістерезису і вважати, що зміна магнітної індукції в залежності від напруженості відбувається по середній (основній) кривій намагнічування.
Важливою характеристикою матеріалу осердя є відносна магнітна проникність m = В/(m0Н), яка показує, в скільки разів проникність даного матеріалу осердя перевищує проникність вакууму. З кривої намагнічування В(Н) видно, що магнітна проникність феромагнітного матеріалу, з якого виготовлене осердя, непостійна. Саме через нелінійний характер зміни індукції від напруженості, тобто через непостійність магнітної проникності і досягається ефект підсилення в магнітному підсилювачі. Підмагнічування постійним струмом призводить до зменшення магнітної проникності і, як наслідок, до збільшення (підсилення) змінного струму.
49. Однотактний магнітний підсилювач, магнітний підсилювач на  одному та двох сердечниках, особливості, статична характеристика.
одному та двох сердечниках, особливості, статична характеристика.
Найпростіша схема МП, яка складається з двох обмоток. Одна обмотка робоча (або обмотка змінного струму) з числом витків wp, інша – обмотка управління з числом витків wy. Обидві обмотки розміщені на спільному феромагнітному замкнутому осерді. На обмотку управління подається вхідний сигнал у вигляді напруги постійного струму Uу, або струму Іу, який підлягає підсиленню. Послідовно з робочою обмоткою включене навантаження Rн, напруга на якому Uн є вихідним сигналом підсилювача. Коло робочої обмотки отримує живлення від джерела напруги змінного струму (наприклад, промислової частоти 50 Гц). Осердя водночас намагнічується двома полями: постійним, створеним струмом Іу, який протікає в обмотці wy, і змінним, створеним струмом Ін, який протікає в обмотці wp. Якщо прийняти опір робочої обмотки тільки індуктивним Хр, а форму струму – близьку до синусоїдальної, то струм в навантаженні:
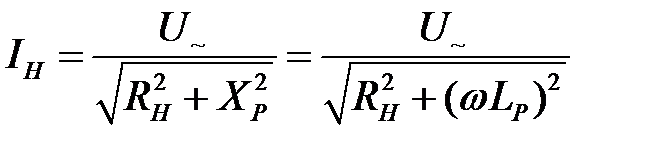 . Оскільки Rн << w Lp,то:
. Оскільки Rн << w Lp,то: 
де  – кутова частота напруги живлення U~, Lp - індуктивність робочої обмотки.
– кутова частота напруги живлення U~, Lp - індуктивність робочої обмотки.
При незмінній напрузі мережі U~ струм в колі навантаження Iн може бути збільшений тільки за рахунок зменшення магнітної проникності mД для змінної складової магнітного поля, бо інші параметри (w; wp, s, m0) не змінюються. Зменшення магнітної проникності mД досягається за рахунок збільшення постійного підмагнічувального поля в осерді, створюваного струмом управління Іу.
При зміні струму навантаження Ін буде змінюватись і падіння напруги Uн на навантаженні Rн, тобто вихідний сигнал. Потужність, що виділяється на навантаженні, може в багато разів перевищувати потужність, що витрачається на управляючій обмотці, тобто схема має властивості підсилювання і її можна розглядати як найпростіший магнітний підсилювач. Такий підсилювач називають ще дросельним, оскільки зміна струму на навантаженні забезпечується за рахунок зміни індуктивності робочої обмо 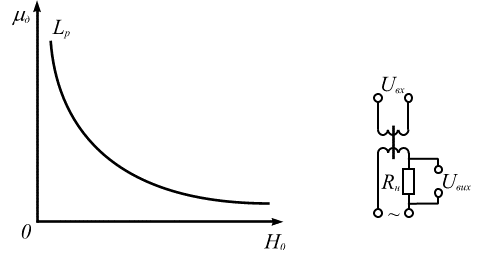 тки, тобто опору дроселя – котушки з осердям.
тки, тобто опору дроселя – котушки з осердям.
Така схема має серйозні недоліки і вкрай рідко застосовується на практиці, оскільки змінний магнітний потік, який замикається по осердю, наводить в обмотці управління змінну ЕРС. Тому вихідний сигнал може впливати на вхідний. А підсилювачі повинні мати однонаправленість дії: тільки від входу до виходу. Для зменшення значення змінного струму, який протікає по колу управління під впливом наведеної ЕРС, послідовно з обмоткою управління Wу включають велику індуктивність Ly. Однак при цьому збільшується інерційність підсилювача: при швидких змінах вхідної напруги струм управління змінюється повільно. Крім того, збільшується витрата матеріалу, зростають габарити і вага підсилювача. Іншим недоліком розглянутої схеми є те, що форма струму в навантаженні істотно відрізняється від синусоїди. Для знищення ЕРС, що наводиться в обмотці управління, використовують схеми магнітних підсилювачів з двома однаковими осердями.
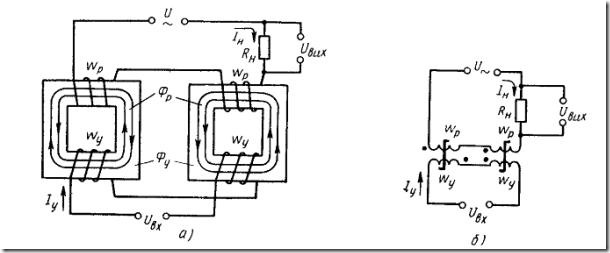 Робоча обмотка wp і обмотка управління wy мають по дві секції – по одній на кожному осерді. Секції обмотки wy з’єднуються послідовно і зустрічно; отже відбувається взаємне віднімання ЕРС, які індукуються в кожній секції. Оскільки осердя і відповідні обмотки на них однакові, відбувається взаємне знищення (компенсація) ЕРС, які наводяться змінним магнітним полем. Секції робочої обмотки Wp включені послідовно і назустріч. В один напівперіод змінної напруги живлення U~ змінний магнітний потік Фp складається з постійним магнітним потоком Фу в одному осерді і віднімається в другому осерді. В наступному напівперіоді осердя міняються ролями. Таким чином, спільна дія на коло навантаження обох секцій робочих обмоток в кожному з напівперіодів цілком однакова. Обидві напівхвилі навантаження будуть симетричні (без парних гармонік), тобто форма кривої струму буде менш викривлена, ніж в схемі з одним осердям.
Робоча обмотка wp і обмотка управління wy мають по дві секції – по одній на кожному осерді. Секції обмотки wy з’єднуються послідовно і зустрічно; отже відбувається взаємне віднімання ЕРС, які індукуються в кожній секції. Оскільки осердя і відповідні обмотки на них однакові, відбувається взаємне знищення (компенсація) ЕРС, які наводяться змінним магнітним полем. Секції робочої обмотки Wp включені послідовно і назустріч. В один напівперіод змінної напруги живлення U~ змінний магнітний потік Фp складається з постійним магнітним потоком Фу в одному осерді і віднімається в другому осерді. В наступному напівперіоді осердя міняються ролями. Таким чином, спільна дія на коло навантаження обох секцій робочих обмоток в кожному з напівперіодів цілком однакова. Обидві напівхвилі навантаження будуть симетричні (без парних гармонік), тобто форма кривої струму буде менш викривлена, ніж в схемі з одним осердям.
51. Магнітні підсилювачі з зовнішнім та внутрішнім зворотним зв’язком.
Висока стабільність характеристики  магнітних підсилювачів дозволяє вводити позитивний зворотний зв’язок не порушуючи роботи підсилювача. Позитивний зворотній зв’язок сприяє значному підвищенню коефіцієнта підсилення підсилювача.
магнітних підсилювачів дозволяє вводити позитивний зворотний зв’язок не порушуючи роботи підсилювача. Позитивний зворотній зв’язок сприяє значному підвищенню коефіцієнта підсилення підсилювача.
Підсилювачі з зовнішнім зворотним зв’язком – це такі підсилювачі, в яких окрім обмотки управління додатково передбачена спеціальна обмотка зворотного зв’язку.
Принцип роботи:
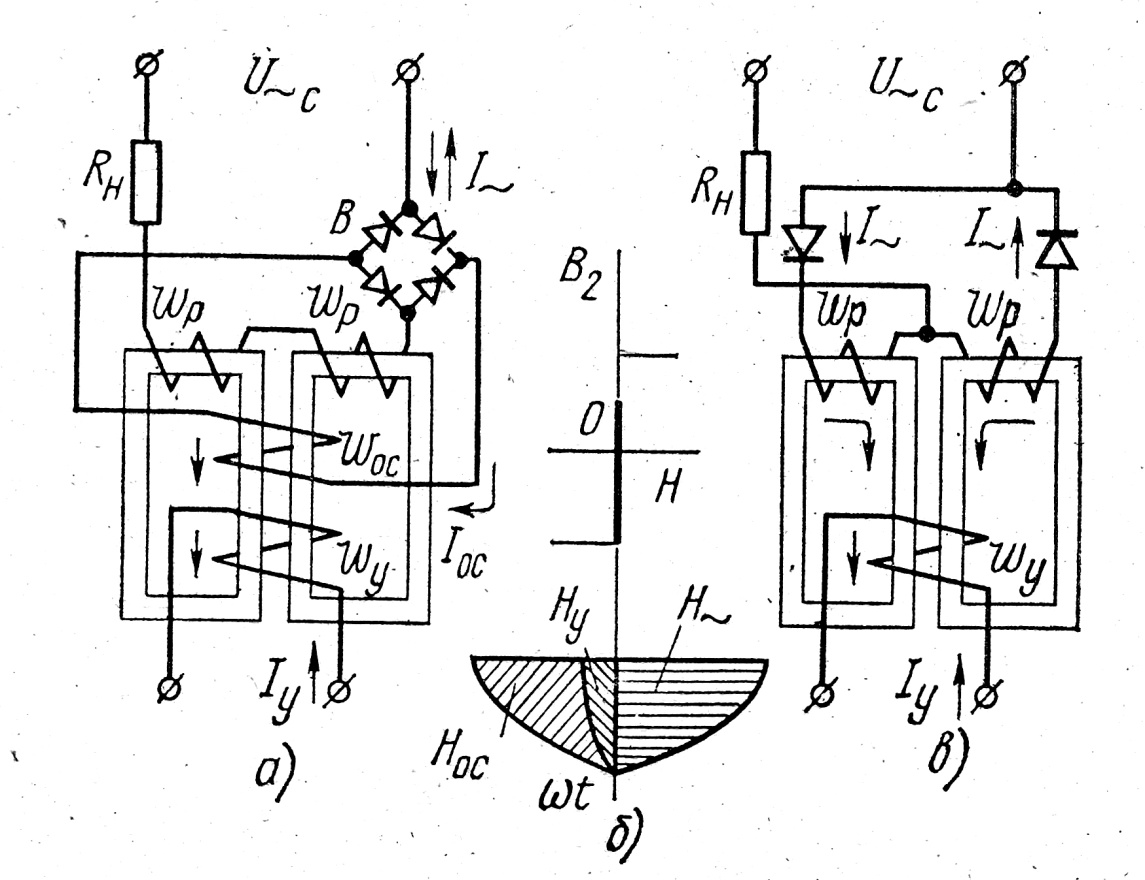
Значення струму управління, необхідне для отримання струму в навантаженні визначається імпульсом напруженості  (рис. 2.7,б) яка повинна коменсувати дію напруженості
(рис. 2.7,б) яка повинна коменсувати дію напруженості  в тому сердечнику, де ці напруженості віднімаються в заданому півперіоді. Таку компенсацію
в тому сердечнику, де ці напруженості віднімаються в заданому півперіоді. Таку компенсацію  можна здійснити і з допомогою вихідного струму
можна здійснити і з допомогою вихідного струму
 , якщо його випрямити і ввести в спеціальну обмотку зворотнього зв’язку
, якщо його випрямити і ввести в спеціальну обмотку зворотнього зв’язку  (рис. 3.1,а). Таким чином, вихідна величина
(рис. 3.1,а). Таким чином, вихідна величина  , створюючи напруженість
, створюючи напруженість  , ніби подається назад на вхід підсилювача, діючи сумісно з вхідною величиною
, ніби подається назад на вхід підсилювача, діючи сумісно з вхідною величиною  . Здійснений по схемі (рис. 3.1,а) зворотній зв’язок із спеціальною зовнішньою обмоткою зворотнього зв’язку називають зовнішнім зворотним зв’язком.
. Здійснений по схемі (рис. 3.1,а) зворотній зв’язок із спеціальною зовнішньою обмоткою зворотнього зв’язку називають зовнішнім зворотним зв’язком.
Підсилювачі з внутрішнім зворотним зв’язком — це такі підсилювачі, де постійне магнітне поле створюється за рахунок постійної складової струму навантаження, яка протікає по робочим обмоткам підсилювача.
Принцип роботи:
Отримати постійну складову напруженості з допомогою вихідного струму можна, використавши схему на (рис. 3.1, в), де цей струм за рахунок діодів проходить в додатній півперіод по робочій обмотці одного, а в від’ємний півперіод – по обмотці другого сердечника. Робочі обмотки почергово створюють напруженість, спрямовану в одну і ту ж сторону відносно обмотки управління. Таким чином виникає постійна складова напруженості . Такі магнітні підсилювач називають підсилювачами з внутрішнім зворотним зв’язком.
52. Двохтактний магнітний підсилювач, особливості, характеристики.
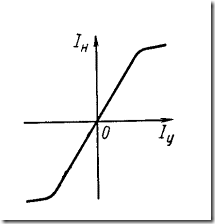
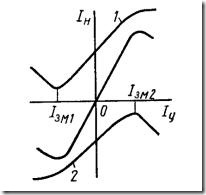
Реверсивні магнітні підсилювачі відрізняються тим, що при зміні полярності вхідного сигналу (струму керування) змінюється полярність вихідного сигналу (струму навантаження). Реверсивні магнітні підсилювачі можуть живити навантаження постійного або змінного струму. В останньому випадку, в залежності від полярності струму керування, змінюється на 180  фаза вихідної напруги. Статична характеристика реверсивного магнітного підсилювача має вигляд симетричної кривої, що проходить через початок координат. Таким чином, за відсутності сигналу управління (Іу=0) струм в навантаженні також дорівнює нулю. Нагадаємо, що в нереверсивних (однотактних) магнітних підсилювачах при Іу=0 через навантаження проходить струм холостого ходу, для зменшення якого використовують, наприклад, зміщення.
фаза вихідної напруги. Статична характеристика реверсивного магнітного підсилювача має вигляд симетричної кривої, що проходить через початок координат. Таким чином, за відсутності сигналу управління (Іу=0) струм в навантаженні також дорівнює нулю. Нагадаємо, що в нереверсивних (однотактних) магнітних підсилювачах при Іу=0 через навантаження проходить струм холостого ходу, для зменшення якого використовують, наприклад, зміщення.
 <<<Статична характеристика реверсивного магнітного підсилювача
<<<Статична характеристика реверсивного магнітного підсилювача
Побудова статичної характеристики реверсивного магнітного підсилювача >>>
Відповідну статичну характеристику реверсивного магнітного підсилювача можна отримати, якщо з’єднати два однакових нереверсивних підсилювача таким чином, щоб вони діяли на загальне навантаження зустрічно при загальному сигналі управління. На рис. показані дві характеристики (1 і 2) однотактних магнітних підсилювачів із зміщенням і без зворотного зв’язку. При зустрічному включенні таких підсилювачів їх підсумкова статична характеристика одержується графічним додаванням кривих 1 і 2. Для того щоб струм навантаження при Іу = 0 дорівнював нулю, необхідна ідентичність характеристик магнітних підсилювачів, що складають реверсивний магнітний підсилювач. Однотактні магнітні підсилювачі, на основі яких виконується реверсивний магнітний підсилювач, можуть бути включені за диференціальною або мостовою схемами.
Розрізняють реверсивні магнітні підсилювачі з вихідним постійним і змінним струмом, зі зворотними зв’язками і без них. Оскільки реверсивний магнітний підсилювач складається з двох однотактних підсилювачів, то він має чотири осердя, але розроблені схеми і з меншим числом осердь.
Реверсивні підсилювачі, у яких при зміні полярності керуючого сигналу змінюється полярність струму навантаження є підсилювачами з вихідним постійним струмом.
Підсилювачі, які змінюють фазу вихідного струму на 180 при зміні полярності керуючого сигналу є підс. З вихідним змінним струмом. Така зміна фази необхідна при реверсі двофазних двигунів, працюючих в слідкуючих системах та ін.. Є три основні види схем таких підсилювачів: диференціальна, мостова і трансформаторна.
53. Мостовий магнітний підсилювач, принцип побудови, особливості роботи.
Рис. 4.6. Мостова схема реверсивного магнітного підсилювача з виходом змінного струму без оберненого зв’язку, а- сердечник з обмотками; б- схема з’єднань робочих обмоток
У мостовій схемі робочі обмотки W1a i W1б і робочі обмотки другого W2a i W2б нереверсивного підсилювача створюють чотири плеча моста, в одну діагональ якого включають навантаження, а в другу – напругу (рис.4.6.б).
При відсутності струму керування індуктивності всіх обмоток Wр однакові, міст врівноважений і струм у навантаженні дорівнює нулю. При подачі струму керування індуктивність зменшується у тієї пари робочих обмоток, в сердечниках яких напруженість зміщення і керування накладаються. І збільшуються у двох інших обмотках Wp. Так як робочі обмотки одного нереверсивного підсилювача знаходиться у протилежних плечах моста, міст виходить із рівноваги, і по навантаженні тече струм, фаза якого міняється на 180 градусів при зміні полярності струму керування.
Мостова схема реверсивного підсилювача може бути виконана на підсилювачах з самонасиченням.
Мостова схема реверсивного підсилювача з виходом змінного струму з само насиченням: а- сердечник з обмотками; б-схеми з’єднань робочих обмоток.
В реверсивному магнітному підсилювачі з вихідним постійним струмом при зміні полярності вхідного сигналу струм в навантаженні змінює напрямок на зворотний. Такі підсилювачі виконуються за диференціальною схемою, тобто струм в навантаженні є різниця двох випрямлених струмів.
54. Трансформаторний МП, принцип побудови, особливості роботи.
Трансформаторна схема реверсивного підсилювача також складається із двох нереверсивних підсилювачів (рис. 4.8). Трансформаторні підсилювачі крім звичайних робочих обмоток, роль яких виконують первинні обмотки Wр1, мають вторинні обмотки Wр2, ЕРС яких зв’язана з напругою, яка прикладається до первинних робочих обмоток коефіцієнтом трансформації.
У реверсивній схемі обмотки Wр1 обох підсилювачів включені послідовно з джерелом живлення. Включені зустрічно вторинні обмотки замкнуті на опір навантаження.
При відсутності струму керування сердечники двох підсилювачів підмагнічені обмотками зміщення в однаковому степені, індуктивності двох обмоток Wр1 однакові і напруга джерела живлення порівну ділиться між двома підсилювачами.
Вторинні ЕРС рівні, і їх різниця, яка прикладена до навантаження рівна нулю. При подачі струму в обмотки керування зменшується індуктивність тієї пари обмоток Wр1, в сердечниках яких напруженість керування і зміщення накладаються, індуктивність другої пари обмоток збільшується. Напруга U1 розподіляється відповідно опорами первинних обмоток, разом з ним міняються вторинні напруги. На навантаженні появляється зміна вторинної напруги, яка міняє фазу на 180 градусів при зміні полярності керуючого сигналу.
Шляхом відповідного вибору коефіцієнта трансформації можна отримати різну величину напруги на навантаженні, незалежно від напруги живлення. Таким чином, схема зміщує функції підсилювача і трансформатора.
Із схем без зворотнього зв’язку найбільш проста мостова схема, яка не має трансформатора, і яка володіє меншими втратами в обмотках порівняно з трансформаторною схемою. Останнє пояснюється тим, що у трансформаторній схемі максимальний струм навантаження тече по всім чотирьом вторинним обмоткам, а з урахуванням коефіцієнта трансформації по всім чотирьом первинним. У мостовій схемі цей струм проходить по двох обмоткам із чотирьох, які розміщені у протилежних плечах моста.
Однак мостову схему можна застосувати тільки у тому випадку, якщо максимальна напруга на навантаженні не перевищує 65-75% напруги джерела живлення, так як досягнути ідеального випадку  - неможливо.
- неможливо.
Трансформаторну схему добре використовувати тоді, коли максимальна напруга на навантаженні повинна бути більша, або набагато менша напруги живлення мережі.
56.Модулятори, властивості, принцип побудови та застосування.
Магнітні модулятори (ММ) призначені для перетворення постійної напруги (або струму) у пропорційну їй змінну напругу (або струм). Необхідність у такому перетворенні виникає при вимірюванні малих сигналів постійного струму або напруги, що не можуть бути безпосередньо подані на вимірювальні або виконавчі пристрої без попереднього підсилення. У той же час безпосереднє підсилення сигналів постійного струму електронними і напівпровідниковими підсилювачами має суттєвий недолік – нестабільність нульового сигналу, так званий дрейф нуля. У випадку перетворення сигналу постійного струму у змінний можна замінити низькостабільний підсилювач постійного струму високостабільним підсилювачем змінного струму. Для такого перетворення можна використовувати й електромеханічний пристрій – віброперетворювач. Проте наявність у віброперетворювача контактів, що періодично розмикаються і замикаються, є причиною його порівняно невисокої надійності. Оскільки магнітний модулятор не має контактів, тобто є безконтактним елементом автоматики, то і надійність його вища, ніж у віброперетворювача. За принципом дії та будовою магнітний модулятор нічим не відрізняється від магнітного підсилювача. Слід зазначити, що безконтактне перетворення постійного струму в змінний виконують і модулятори інших типів, наприклад напівпровідникові (у тому числі транзисторні).У порівнянні з напівпровідниковими, окремі типи магнітних модуляторів мають кращу стабільність нуля (особливо при зміні температури навколишнього середовища). Так само як і напівпровідникові, магнітні модулятори можуть виконувати перетворення постійної напруги в змінну з одночасним підсиленням. Магнітні модулятори простими способами забезпечують підсумовування великого числа сигналів без необхідності введення гальванічного зв’язку між ними. Гальванічний зв’язок полягає в безпосередньому з’єднанні електричних кіл. Він іноді буває вкрай небажаним, оскільки призводить до шкідливого впливу одного елемента автоматики на інший. Найбільший недолік магнітних модуляторів у порівнянні з напівпровідниковими – це великі габарити і вага.Досить часто комбінують магнітний модулятор із напівпровідниковим підсилювачем, тобто проектують магніто-напівпровідникові перетворювачі. У цьому випадку можна одержати оптимальне співвідношення між такими технічними характеристиками, як точність, чутливість, коефіцієнт підсилення, вага, габарити, вартість, надійність.Магнітні модулятори, призначені для роботи на наступний електронний або напівпровідниковий каскад підсилення, називають магнітними підсилювачами напруги. Розрізняють магнітні модулятори з вихідним змінним струмом основної і подвійної частоти.
58.Електромашинні підсилювачі. Однокаскадний ЕМП, його характеристики.
Однокаскадний ЕМП. Цей тип ЕМП є генератором пост. струму з незалежним збудженням.
Генератор постійного струму конструктивно складається з ротора і статора. На статорі намотана обмотка збудження (двополюсні, або 4-ри полюсні), на яку подається вхідний струм. З рухомого якоря через колектор з допоміжних щіток знімається вихідна напруга. Статична характеристика генератора (ідеалізована):
Відношення вихідної потужності генератора до вхідної визначає коефіцієнт підсилення за потужністю. Для роботи генератора його якір треба обертати від зовнішнього приводу з постійною номінальною швидкістю.
Робота полягає в тому, що при подачі вхідної напруги на обмотку збудження створюється потік збудження. За рахунок обертання якоря, в пазах якого намотана якірна обмотка, в ній індукується ЕРС, полярність якої залежить від полярності вхідної напруги. коефіцієнта підсилення по потужності отримуємо за рахунок енергії привідного двигуна, який обертає якір.
Для збільш. коефіцієнта підсилення можна використовувати двокаскадний ЕМП.
|
|
|
|
|
Дата добавления: 2015-05-26; Просмотров: 2305; Нарушение авторских прав?; Мы поможем в написании вашей работы!