КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Асинхронний двофазний виконавчий двигун, способи керування
|
|
|
|
Рис. 1. Двофазні асинхронні двигуни
а - з короткозамкнутим ротором; б - з порожнистим ротором
Обертові магнітні поля можуть бути створені й двофазними обмотками, якщо обидві фази цих обмоток просторово зміщені на 90 ° один щодо одного. Якщо фази обмотки живити двома струмами, зміщеними на 90 ° по фазі, то виходить, як і в трифазному електродвигуні, що обертається магнітне поле.
У двофазному електродвигуні створюється обертаючий момент, зумовлений струмами, викликаними обертовим магнітним полем у стрижнях ротора електродвигуна. Ротор отримує прискорення до тих пір, поки він - як і в трифазному асинхронному двигуні - не досягне певної кінцевої частоти обертання, яка нижче за частоту обертання поля.
Якщо обидві фази обмотки ротора живити від однієї і тієї ж мережі однофазного струму, то зсув фаз в одній з обмоток, необхідний для отримання обертового поля, може бути реалізований шляхом підключення конденсатора з достатньою місткістю. На рис.1, а показана схема двофазного асинхронного двигуна з конденсатором при живленні від мережі змінного струму.
В даний час розширилася сфера застосування двофазне асинхронного двигуна у вигляді електродвигуна з порожнистим ротором. У такому електродвигуні замість звичайного короткоземкнутого ротора застосовується алюмінієвий циліндр, який може обертатися у повітряному зазорі між зовнішнім і внутрішнім статора (рис.1б).
Обертове поле викликає в алюмінієвому циліндрі вихрові струми, які, взаємодіючи з магнітним полем в повітряному зазорі, створюють обертаючий момент. Циліндр досягає кінцевої асинхронної частоти обертання, яка відповідає навантаженню на валу.
Невеликий момент інерції ротора електродвигуна зумовлює сприятливі робочі характеристики. Електродвигуни з порожнистим ротором розраховані насамперед на невеликі потужності і застосовуються для автоматичного регулювання в компенсаційних і мостових схемах. Одна з обмоток разом з конденсатором підключається до мережі з напругою, а на другу обмотку подається керуюча напруга.
69. Розрахунок параметрів та рівняння асинхронного виконавчого двигуна.
Синхронна швидкість двигуна:
P – число полюсів; f – частота мережі. 
Активна потужність двигуна: 
Номінальний обертовий момент: 
Розраховуємо максимальний і пусковий обертовий момент: 
Номінальний і пусковий струм: 
6. Визначаємо номінальне і критичне ковзання:
Для побудови характеристик M = f(s) та n = f(M), використаємо наступні формули:
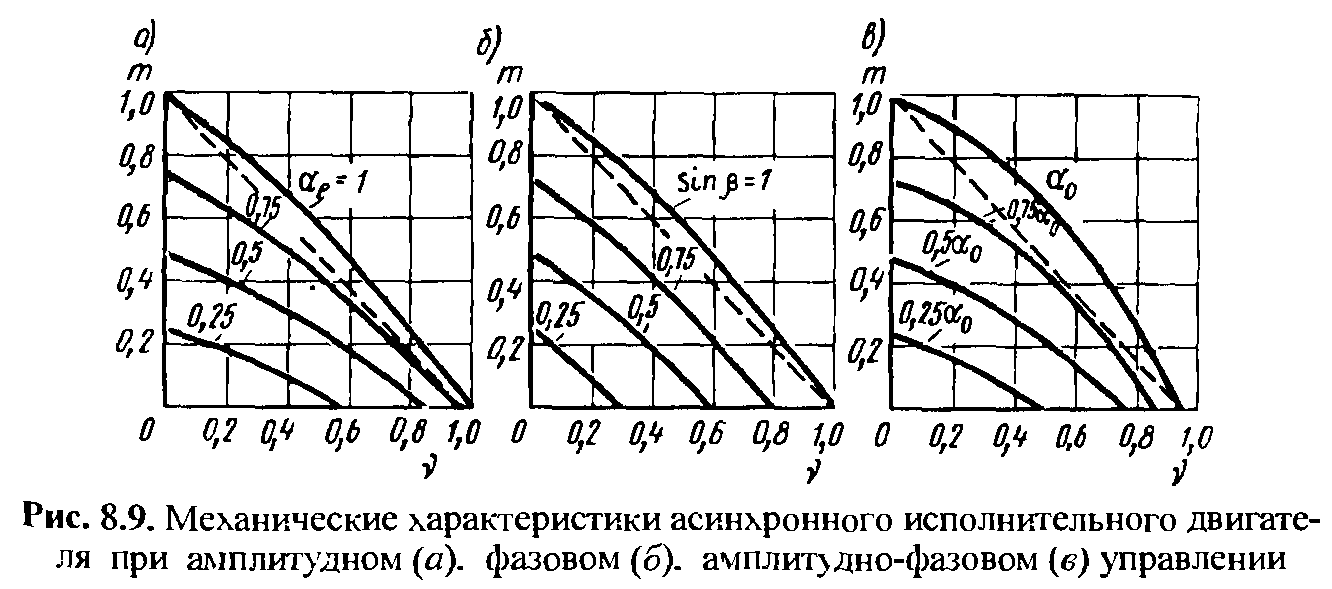
70. Механічні характеристики асинхронного виконавчого двигуна.
Механічні характеристики  при
при  асинхронних виконавчих двигунів при різних способах управління (рис.8.9) майже не відрізняються один від одного. Всі вони криволінійні, особливо при великих значеннях коефіцієнта сигналу. При амплітудно-фазовому управлінні в зоні середніх значень частоти обертання (
асинхронних виконавчих двигунів при різних способах управління (рис.8.9) майже не відрізняються один від одного. Всі вони криволінійні, особливо при великих значеннях коефіцієнта сигналу. При амплітудно-фазовому управлінні в зоні середніх значень частоти обертання ( ) двигун розвиває більший обертовий момент, ніж при амплітудному та фазовому способах управління. Це пояснюється тим, що із ростом частоти обертання збільшується напруга
) двигун розвиває більший обертовий момент, ніж при амплітудному та фазовому способах управління. Це пояснюється тим, що із ростом частоти обертання збільшується напруга  на обмотці збудження (див. рис. 8.7,г), магнітний потік збудження і, відповідно, електромагнітний обертовий момент двигуна. Частота обертання ротора наближається до синхронної (
на обмотці збудження (див. рис. 8.7,г), магнітний потік збудження і, відповідно, електромагнітний обертовий момент двигуна. Частота обертання ротора наближається до синхронної ( ) тільки при найбільших значеннях коефіцієнта сигналу(
) тільки при найбільших значеннях коефіцієнта сигналу( ). Чим менший коефіцієнт сигналу, тим нижча частота обертання холостого ходу, так як із зменшенням напруги управління обертове поле статора стає все більш еліптичним, збільшується зворотна складова цього поля, яка створює на роторі гальмівний момент. Однак при амплітудно-фазовому управлінні навіть при значенні коефіцієнта сигналу
). Чим менший коефіцієнт сигналу, тим нижча частота обертання холостого ходу, так як із зменшенням напруги управління обертове поле статора стає все більш еліптичним, збільшується зворотна складова цього поля, яка створює на роторі гальмівний момент. Однак при амплітудно-фазовому управлінні навіть при значенні коефіцієнта сигналу  частота обертання холостого ходу менше синхронної (
частота обертання холостого ходу менше синхронної ( ). Це пояснюється тим, що значення фазозсуваючої ємності С вибирається з умови отримання колового обертового поля лише при запуску двигуна, тобто при
). Це пояснюється тим, що значення фазозсуваючої ємності С вибирається з умови отримання колового обертового поля лише при запуску двигуна, тобто при  , тому в режимі холостого ходу при
, тому в режимі холостого ходу при  обертове поле двигуна стає еліптичним.
обертове поле двигуна стає еліптичним.
72. Синхронні двигуни змінного струму, їх особливості.
Характерна ознака синхронних двигунів – обертання ротора з синхронною частотою  незалежно від навантаження на валу. Тому ці двигуни використовують в системах автоматики для приводу механізмів, які вимагають стабільної частоти обертання. Існують конструктивні різновиди виконання синхронних двигунів малої потужності, що різняться між собою в основному будовою ротора: явно полюсні з електромагнітним збудженням, явно полюсні з збудженням постійними магнітами, явно полюсні реактивні, неявно полюсні гістерезисні.
незалежно від навантаження на валу. Тому ці двигуни використовують в системах автоматики для приводу механізмів, які вимагають стабільної частоти обертання. Існують конструктивні різновиди виконання синхронних двигунів малої потужності, що різняться між собою в основному будовою ротора: явно полюсні з електромагнітним збудженням, явно полюсні з збудженням постійними магнітами, явно полюсні реактивні, неявно полюсні гістерезисні.
Явно полюсні синхронні двигуни з електромагнітним збудженням.
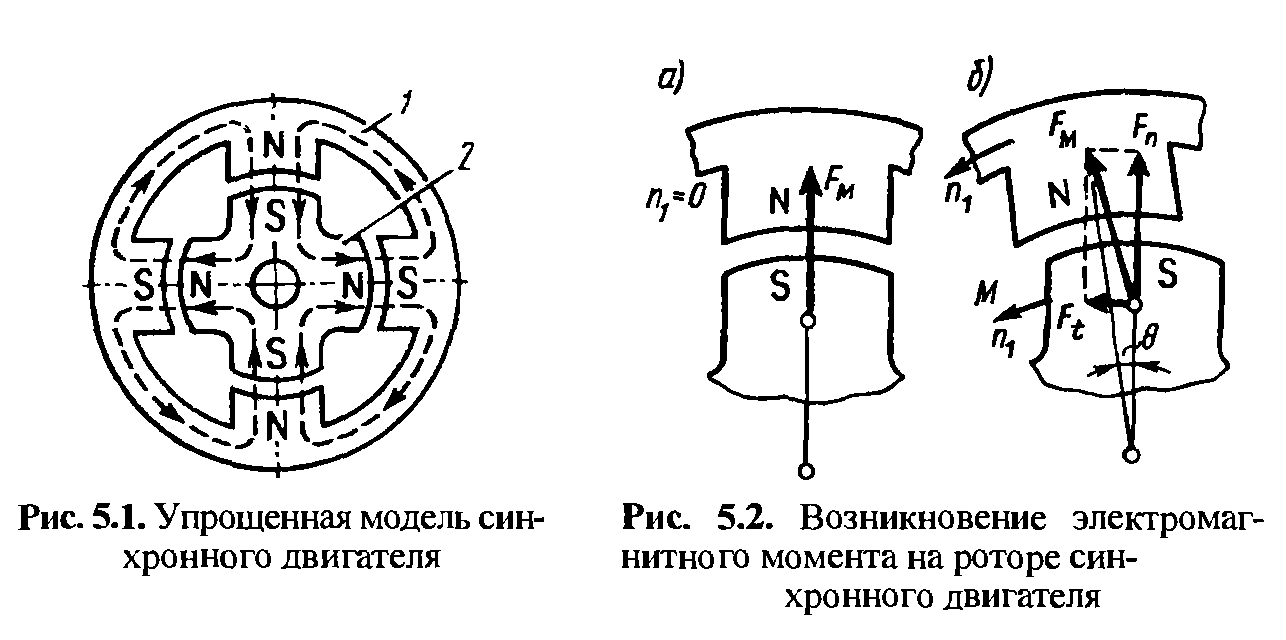
Якщо зовнішня система полюсів нерухома, то завдяки силам магнітного притягання внутрішня полюсів(ротор) розміститься так, що її полюси будуть знаходитися під полюсами зовнішньої системи протилежної полярності. При цьому сили  магнітного притягання діючі на внутрішню систему не будуть створювати електромагнітного моменту (рис. 2.5,а), так як вони спрямовані по осі полюсів. Якщо зовнішню систему полюсів обертати з невеликою частотою
магнітного притягання діючі на внутрішню систему не будуть створювати електромагнітного моменту (рис. 2.5,а), так як вони спрямовані по осі полюсів. Якщо зовнішню систему полюсів обертати з невеликою частотою  , то в початковий момент часу ця система зміститься відносно внутрішньої на деякий кут
, то в початковий момент часу ця система зміститься відносно внутрішньої на деякий кут  (рис. 2.5,б). При цьому вектор сили магнітного притягання також повернеться відносно осі полюса ротора. Тепер ця сила складається з двох складових:
(рис. 2.5,б). При цьому вектор сили магнітного притягання також повернеться відносно осі полюса ротора. Тепер ця сила складається з двох складових:  , причому нормальна складова
, причому нормальна складова  спрямована по осі полюса ротора, а тангенціальна
спрямована по осі полюса ротора, а тангенціальна  - перпендикулярно осі полюса. Сукупність складових , діючих на всі полюси ротора, створює на роторі електромагнітний обертовий момент M, що приводить ротор в обертання з синхронною частотою , тобто синхронному обертанню системи полюсів.
- перпендикулярно осі полюса. Сукупність складових , діючих на всі полюси ротора, створює на роторі електромагнітний обертовий момент M, що приводить ротор в обертання з синхронною частотою , тобто синхронному обертанню системи полюсів.
Неявно полюсні гістерезисні
Конструктивною особливістю є наявність неявно полюсного ротора. У основу принципу дії покладено явище гістерезисного моменту. Гістерезисний двигун може працювати з синхронною та асинхронною частотою обертання.
Явно полюсні реактивні
Ротор такого двигуна може обертатися лише в одну сторону – від неекранованої частини полюса статора до екранованої.
73.Крокові двигуни, їх типи, способи включення.
Кроковий двигун за принципом роботи схожий на синхронний двигун, проте магнітне поле в ньому переміщується дискретно, шляхом послідовної комутації фаз обмотки статора із заданою частотою. Максимальна частота комутації, при якій здійснюється рух ротора без пропуску кроків, називається частотою прийнятності, визначається індуктивністю обмотки статора та моментом інерції ротора. Кроковий двигун може виконуватися з активним чи пасивним ротором та з одно-, дво- чи багатофазною обмоткою статора. Випускаються також лінійні та багатокоординатні крокові двигуни.
Активний ротор найчастіше виконується з постійними магнітами, хоча можливе виконання з електричною обмоткою збудження. Технологічно важко розмістити на роторі багато полюсів, тому активний ротор має достатньо великий крок ротора (15-90)0. Для зменшення кроку повороту ротора використовується багатофазна обмотка статора.
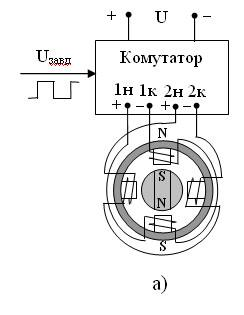 Живлення обмоток статора здійснюється від комутатора імпульсами напруги за сигналом завдання ЧІМ-вигляду.
Живлення обмоток статора здійснюється від комутатора імпульсами напруги за сигналом завдання ЧІМ-вигляду.
Кутове повороту активного ротора дорівнює:  де р – число пар полюсів ротора;
де р – число пар полюсів ротора;
n – число перемикань за цикл.
Число перемикань при симетричній комутації дорівнює кількості фаз обмотки статора n=m, а при несиметричній - удвоє більше, тобто n=2m.
Крокові двигуни з пасивним ротором розділяються на реактивні та індукторні. Реактивний ротор не має систему збудження, а виготовляється з феромагнітного матеріалу і має явно виражені зубці. Статор також має зубці, проте з меншою кількістю. Кут повороту пасивного ротора визначається різницею чисел зубців на роторі Z р та статорі Z с: 
Розглядаються середні значення швидкості та моменту двигуна. Середня швидкість обертання визначається частотою f комутації фаз 
Кроковий двигун має абсолютно жорсткі механічні характеристики як синхронний двигун. Із збільшенням частоти комутації та відповідно швидкості двигуна струм у фазах не встигає досягнути усталеного значення, тому максимальний середній момент зменшується.
Переваги:
· Кут повороту двигуна пропорційний кількості вхідних імпульсів.
· Працює з повним моментом у стані спокою (якщо обмотки підключені до живлення).
· Прецизійне позиціонування і повторюваність кроку — хороші крокові двигуни мають точність близько 3 — 5% кроку і ці помилки не накопичується від кроку до кроку.
· Можливість швидкого розгону, гальмування і зміни напряму руху.
· Безвідмовність. Довговічність двигуна залежить тільки від довговічності підшипників.
· Керування двигуном без зворотного зв'язку.
· Можливість досягнення дуже низьких швидкостей обертання з навантаженням закріпленим безпосередньо на осі двигуна.
· Широкий діапазон швидкостей обертання отримуваний.
Недоліки:
· Механічний резонанс з'являється при неправильному керуванні.
· Складнощі при роботі з дуже високими швидкостями.
74.Лінійні двигуни, їх особливості.
Лінійний двигун, електродвигун, в якого один з елементів магнітної системи розімкнений і має розгорнуту обмотку, що створює магнітне поле, що біжить, а інший виконаний у вигляді тієї, що направляє, забезпечує лінійне переміщення рухливої частини двигуна. Л. д. постійного струму складається з якоря з розташованою на нім обмоткою, службовці одночасно колектором (направляючий елемент), і розімкненого магнітопровода з обмотками збудження (рухлива частина), розташованими так, що вектори сил, що виникають під полюсами магнітопровода, мають однаковий напрям. Відрізняється простотою регулювання швидкості переміщення рухливої частини. Л. д. змінного струму можуть бути асинхронними і синхронними. Якір асинхронного Л. д. у вигляді бруска зазвичай прямокутного перетину без обмоток закріплюється уздовж дороги переміщення рухливої частини двигуна, що має магнітопровід з розгорнутими багатофазними обмотками, що живляться від джерела змінного струму. Унаслідок взаємодії магнітного поля в магнітопроводі рухливої частини з полем якоря виникають сили, які заставляють переміщатися з прискоренням рухливу частину Л. д. відносно нерухомого якоря до тих пір, поки швидкості переміщення двигуна і магнітного поля, що біжить, не зрівняються. Найбільш перспективне вживання асинхронних Л. д. у тягових електроприводах транспортних машин у поєднанні з магнітними і повітряними подушками, що дає можливість підвищити швидкість руху поїздів до 450—500 км/ч. Синхронні Л. д. практично не виготовляються. Основна гідність Л. д. — здатність створювати великі зусилля і, як наслідок цього, можливість розвитку значних прискорень, що особливо важливе для транспортних засобів, а також відсутність редуктора в конструкції двигуна.
75. Електромагнітні муфти, їх типи, конструктивне виконання.
Електромагнітні муфти використовуються для дистанційного зчеплення, розчеплення, перемикання, реверсування кінематичних цілей при передачі обертання і моменту від провідного елементу до веденого, як гальмо і обмежувач передаваного моменту. Індукційні ЕММ із змінним ковзанням дозволяють регулювати частоту обертання веденого валу, згладжувати поштовхи і високочастотні крутильні коливання. Електромагнітні муфти застосовуються у всіляких пускових, перемикаючих, запобіжних, гальмівних і інших пристроях, в ЕМП, рахунково-вирішальних і стежачих системах, системах автоматичного регулювання.
Основною класифікаційною ознакою ЕММ є характер зв'язку провідного і веденого елементів: механічний (фрикційні і зубчасті ЕММ); електромеханічний (порошкові); магнітний (індукційні і гістерезисні), комбіновані (фрикційно-індукційні, фрикційно-зубчасті, індукційні диференціальні) і ін. По передачі руху ЕММ можуть працювати на зчеплення, розчеплення, перемикання, реверсування, гальмування, виконувати запобіжні, демпферні і спеціальні функції, мати жорсткий (зубчаста ЕММ (ЗЕММ), фрикційна ЕММ (ФЕММ)) або м'яку (порошкова ЕММ (ПЕММ), індукційна ЕММ (ІЕММ)) зв'язок провідного і веденого елементів.
Режим роботи може бути релейний (без прослизання провідного і веденого елементів) і ковзання. Самі елементи бувають одно і багатодискові з одним або декількома зазорами у вигляді дисків, конусів і циліндрів.
По роду збудження ЕММ можуть бути електромагнітними уніполярними (осв ЕММ і обмоток паралельні, перпендикулярні або тангенціальні) або з постійними магнітами. Підведення струму виконується з контактними кільцями або без них.
76. Гідравлічні виконавчі механізми.
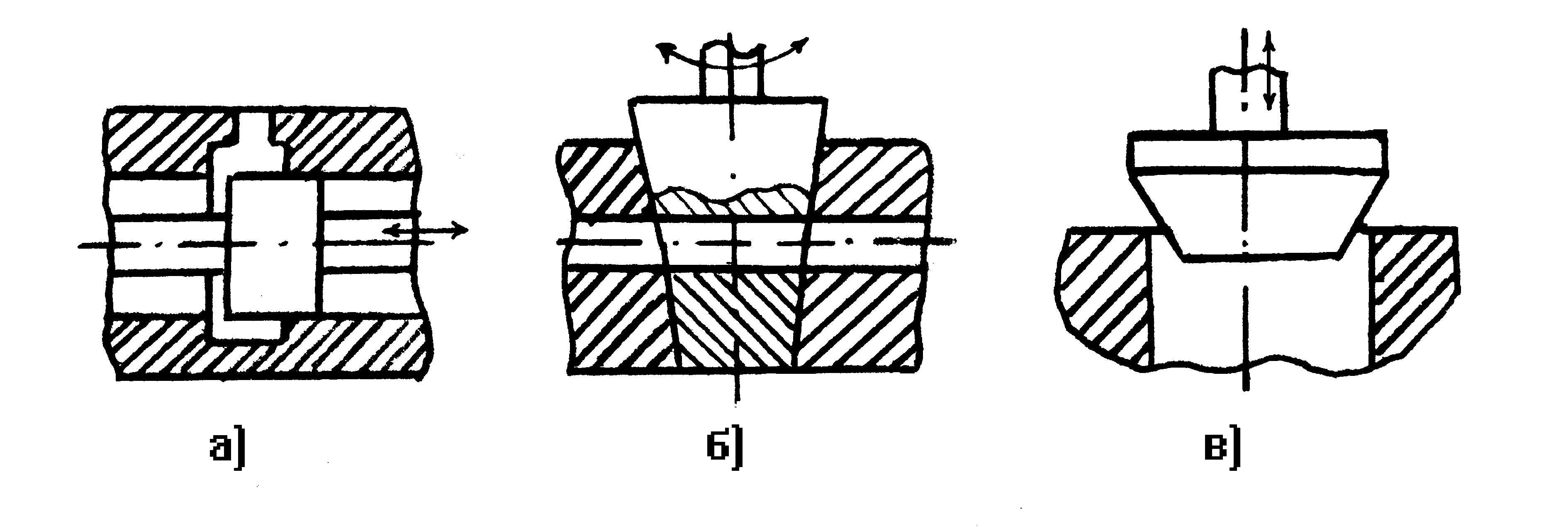 Рис.5.4 Види запірно-регулюючих елементів: а – золотник; б – кран; в – клапан
Рис.5.4 Види запірно-регулюючих елементів: а – золотник; б – кран; в – клапан
Гідравлічний привід дозволяє досить простими засобами автоматизувати роботу багатьох машин. Основна його перевага полягає у високій енергоємності, що характеризується відношенням потужності, що розвивається, до маси гідравлічного устаткування. Через малу інерцію рухливих частин і малої стискальності робочого середовища гідропривід має високу швидкодію. Він також забезпечує безступінчасте регулювання швидкостей, зусиль і моментів і простоту захисту робочих машин від перевантажень. Особливу перевагу в порівнянні з іншими приводами, наприклад з електричним, гідропривід має при передачі великих потужностей і моментів. Характерною рисою будь-якого ГВМ є наявність запірно-регулюючого елемента, їх може бути три види: золотник, кран, клапан. Любий з цих елементів складається з рухливої і нерухомої деталей, що утворять прохідний перетин ГВМ. За рахунок зміни площі прохідного перетину представляється можливим змінювати перепад тиску чи витрат рідини в ГВМ. При перекритті прохідного перетину потік робочої рідини через нього припиняється.
77. Пневматичні виконавчі механізми (ПВМ).
 За видом чутливого елемента, який перетворює тиск стисненого повітря в перестановочне зусилля, пневматичні ВМ поділяються на мембранні, поршневі, сильфонні і лопатеві. З них тільки лопатеві безпосередньо створюють поворотний рух вихідної ланки; інші своїм переміщенням створюють поступальний рух штока, який потім за допомогою додаткового пристрою може бути перетворений у поворотний. Тиск використовуваного в пневматичних ВМ стисненого повітря зазвичай не перевищує 0,6 МПа.
За видом чутливого елемента, який перетворює тиск стисненого повітря в перестановочне зусилля, пневматичні ВМ поділяються на мембранні, поршневі, сильфонні і лопатеві. З них тільки лопатеві безпосередньо створюють поворотний рух вихідної ланки; інші своїм переміщенням створюють поступальний рух штока, який потім за допомогою додаткового пристрою може бути перетворений у поворотний. Тиск використовуваного в пневматичних ВМ стисненого повітря зазвичай не перевищує 0,6 МПа.
У мембранному виконавчому механізмі переміщення вихідного штока в одному напрямі створюється тиском стислого повітря в мембранній порожнині, а в іншому — силою стислої пружини (пружинні мембранні виконавчі механізми). Ці механізми мають вихідний шток з поворотно-поступальним рухом, як правило, конструктивно пов'язаний з регулювальними органами. У залежності від напряму руху штока при підвищенні тиску повітря у мембранній порожнині розрізнюють механізми прямої і зворотної дії. У поршневих виконавчих механізмах зусилля, що переміщує вихідний шток, створюється тиском робочого середовища в поршневих порожнинах. У порівнянні з мембранними вони мають більшу величину переміщення вихідного штока.
78.Генератор постійного струму з незалежним збудженням.
Генератор постійного струму — електрична машина постійного струму (генератор), що перетворює механічну енергію на електричну. Дія генератора постійного струму грунтується на явищі електромагнітної індукції: збудженні змінної електрорушійної сили в обмотці ротора (якоря), при його обертанні в основному магнітному полі, створюваному обмоткою збудження на полюсах. Обмотка ротора з'єднана з колектором, по пластинах якого ковзають контактні щітки, підключаючи обмотку до зовнішнього електричного кола. Розрізняють генератори постійного струму з незалежним збудженням (від стороннього джерела струму) і з залежним збудженням (самозбудженням), зумовленим залишковим магнетизмом у станині й полюсах. Генератори постійного струму застосовують для живлення постійного струму електродвигунів, у зварювальних пристроях, електричних установках літаків, тепловозів, автомобілів, у пристроях автоматики (мікрогенератори постійного струму), для електролізу тощо.
генератори з незалежним збудженням. В цьому генераторі струм збудження Із не залежить від струму якоря Іа, який рівний струмові навантаження Ін. Сила струму Із визначається напругою джерела живлення і опором кола збудження (опором обмотки збудження rз і регулюючого опору rр.з): Із = Uз/(rз + rр.з).
Як правило, струм збудження складає (1¸3)% від номінального струму якоря. Головними характеристиками генератора з незалежним збудженням являються: характеристика холостого ходу, зовнішня, регулююча і навантажувальна характеристики.
Характеристикою холостого ходу (рис.1.4.1, б) є графічне зображення залежності
Ео = f(Із), визначеної при Ін = 0 і n = nном = const. При холостому ході машини напруга на якорі рівна ЕРС: U = Ео = СеФзn.
 Характеристику Ео = f(Із) визначають при поступовому збільшенні струму збудження від нуля до значення, при якому Ео = 1,25Uном, а потім струм збудження зменшують до нуля. Різниця між зростаючою і спадаючою вітками характеристики існує за рахунок гістерезису в магнітопроводі машини. На практиці користуються середньою по ЕРС характеристикою холостого ходу генератора.
Характеристику Ео = f(Із) визначають при поступовому збільшенні струму збудження від нуля до значення, при якому Ео = 1,25Uном, а потім струм збудження зменшують до нуля. Різниця між зростаючою і спадаючою вітками характеристики існує за рахунок гістерезису в магнітопроводі машини. На практиці користуються середньою по ЕРС характеристикою холостого ходу генератора.
Зовнішньою характеристикою (рис. 1.4.1, в) називається графічне зображення залежності U = f(Ін), що визначається при n = nном = const і Із = Із.ном = const.
При наявності навантаження генератора його напруга U = E – IarS, де rS – сума всіх опорів, ввімкнених послідовно в коло якоря (якоря, додаткових полюсів, компенсаційної обмотки і т.д.).
Регулюючою характеристикою (рис.1.4.1, г) називається графічне зображення залежності Із = f(Ін), що визначається при U = const, nном = const. Вона встановлює закон регулювання струму збудження при зміні навантаження і постійній напрузі генератора. Характеристика показує, що з збільшенням навантаження для підтримки U = const необхідно збільшити струм збудження.
Релейні підсилювачі
Реле – пристрої, в яких вихідна величина міняється стрибком при досягненні вхідною величиною деяких певних значень. Реле має нелінійну статичну характеристику. Ці елементи є підсилювальними, оскільки потужність вихідного сигналу може бути набагато більша, ніж вхідного.
Найбільше поширення в САК отримали електромеханічні реле. В основі роботи електромагнітного реле покладено явище електромагніту притягувати феромагнітні метали при проходженні струму через котушку керування. В системах автоматики часто зустрічаються електромагнітні реле, керовані сигналами постійного струму. В залежності від способу підключення джерела енергії до виходу електромагнітні реле класифікують на контактні та безконтактні.
В контактних це підключення здійснюється замиканням контактів.
В безконтактних – стрибкоподібною зміною провідності керованого вхідним сигналом елемента, який має нелінійну характеристику і охоплений додатнім зворотним зв’язком.
Основні характеристики реле:
· Струм спрацювання Іуспр – мінімальний струм управління, при якому проходить стрибкоподібне збільшення вихідного струму;
· Струм відпускання Іувідп – мінімальний стум управління, при якому вихідний струм зменшується до початкового значення;
· Час спрацювання tспр – час від моменту подачі вхідного струму управління до стрибкоподібного збільшення вихідного струму;
· Час відпускання tвідп – час від моменту відключення струму управління до змешення вихідного струму до початкового значення;
· Робочий струм Іу.р – величина струму управління, при якому забезпечується надійне утримання максимального значення вихідного струму. Iу.р>Іуспр;
· Потужність, яка комутується Рвих.мах – максимальна потужність, яка знімається з виходу реле при включенні;
· Коефіцієнт підсилення по потужності:  ;
;
Ry – опір обмотки управління;
Рсер – потужність у колі управління при спрацюванні реле;
· Число спрацювань N – гарантоване число спрацювань номінально навантаженого реле при заданій надійності;
· Коефіцієнт повернення реле  ;
;
Реле бувають нейтральні і поляризовані.
В нейтральних характеристика вихідного сигналу не залежить від полярності вхідного.
В поляризованих будь-яка з характеристик вихідного сигналу (полярність, фаза) змінюються при зміні полярності вхідного сигналу управління.
Електро(магнітні/механічні) реле.
Цей тип реле найбільш часто застосовується в СА. Основними елементами нейтрального електромагнітного реле з поворотним якорем є такі:
1 – котушка
2 – магнітопровід (осердя і ярмо)
3 – пружна повернення
4 – якір
5 – контактна група
6 – штифт
Якір в електромагнітному реле може бути і втяжного типу. В цьому випадку при подачі Іу якір втягується в котушку, розвиваючи при цьому велике зусилля на контактні групи. Це дозволяє застосовувати такі реле для комутації потужних електричних кіл.
Контактні групи електромагнітного реле можуть мати контакти, які при спрацюванні замикаються або розмикаються.
Статична характеристика нейтрального електромагнітного реле:
В аналітичній формі запис статичної характеристики наступний:

Тягові механічні характеристики електромагнітного реле.
При проходженні по обмотці реле постійного струму (обмотка має W витків) створюється магнітний потік Ф, який замикається через осердя, ярмо, якір і повітряний проміжок між осердям і якорем. Цей магнітний потік створює тягове зусилля:
S – площа перетину магнітопроводу;
μ0 – магнітна проникність повітря;
σ – довжина повітряного проміжку між якорем і осердям;
З формули випливає, що тягове зусилля прямо пропорційне квадрату намагнічуючої сили (IW) і обернено пропорційна квадрату довжини повітряного проміжку. Ця сила не залежить від напряму проходження струму управління.
Залежність  при
при  називають тяговою характеристикою електромагнітного реле. В процесі спрацювання електромагнітного реле змінюється повітряний проміжок (зменшується), отже і сила, яка діє на якір. З приведеного виразу випливає, що ідеальна тягова характеристика являє собою гіперболу
називають тяговою характеристикою електромагнітного реле. В процесі спрацювання електромагнітного реле змінюється повітряний проміжок (зменшується), отже і сила, яка діє на якір. З приведеного виразу випливає, що ідеальна тягова характеристика являє собою гіперболу
Залежність протидіючих сил FM від проміжку між якорем і осердям називають механічною характеристикою електромагнітного реле.
При проектуванні електромагнітного реле слід забезпечити узгодження тягової і механічної характеристик. Тягова характеристика, яка відповідає ампервиткам спрацювання, повинна проходити в усіх точках вище механічної характеристики, а тягова характеристика, яка відповідає ампервиткам відпускання, повинна бути нижче механічної, в іншому випадку не буде чіткого спрацюваня електромеханічного реле.
Контакти реле. Способи іскрогасіння.
Контакти – найвідповідальніший елемент реле, які служать для перемикання керованих кіл. Надійність реле в основному визначають контакти.
Контакти поділяють на:
· Замикаючі (нормально розімкнуті, при відсутності струму керування розімкнуті);
· Розмикаючі (нормально замкнуті, при відсутності струму керування замкнуті);
· Перемикаючі (з загальним рухомим контактом);
Головною причиною руйнування контактів є газовий розряд, який супроводжується появою іскри. Іскра появляється при розмиканні контактів. Особливо сильний і затяжний розряд виникає при розриві кола, яке містить індуктивність внаслідок виникаючої при цьому перенапруги на контактах. Для зменшення іскри і збільшення терміну служби реле застосовують спеціальні заходи:
Іскрогасячі контури – підключаються паралельно контактам або послідовно контуру навантаження.
Призначення іскрогасячих контурів – зменшення напруги на контактах при їх розмиканні.
В ПА часто необхідно змінити часові параметри спрацювання і відпускання реле. Один з найбільш ефективних конструктивних методів збільшення часу спрацювання і відпускання полягає у встановленні на осердя реле коротко замкнутого витка, втулки або кільця. При зміні струму в обмотці реле в цьому витку наводиться ЕРС, протікає струм, що створює магнітний потік, який протидіє основному. Оскільки ця протидія проявляється тільки при перехідних режимах, то при цьому сповільнюється час спрацювання і відпускання.
Схемні методи полягають у під'єднанні до обмотки реле паралельно або послідовно в різних комбінаціях активних, реактивних, лінійних чи нелінійних елементів.
Схема 1 збільшує час відпускання за рахунок ЕРС самоіндукції. При розмиканні контакту реле деякий час знаходиться під струмом самоіндукції, який проходить через діод. Час спрацювання практично не міняється.
Схема 2. при замиканні контакту струм в початковий момент проходить через конденсатор. По мірі його зарядження напруга на обмотці реле збільшується і воно спрацьовує. В результаті збільшується час спрацювання. Аналогічно збільшується і час відпускання. При ємностях 100..2000 мкФ і використанні реле з великим опором (1..10 кОм) час відпускання може змінюватись від десятих часток секунди до десятків секунд.
Магнітокеровані контакти (геркони)
Геркони складаються з герметизованого керованого магнітним полем контакту. Контакти (язички) виготовляють з феромагнітного дроту і впаяні в герметичн капсулу.
Контактні поверхні язичків покривають золотом або платиною для зменшення опору контакту. Проміжок між язичками 300..500 мкм. Капсула наповнена інертним газом, що покращує надійність контакту.
При дії зовнішнього магнітного поля контакти притягуються один до одного і замикають електричне коло. Дія магнітокерованого контакту ґрунтується на використанні сил взаємодії, що виникають між феромагнітними тілами в магнітному полі. Зовні геркона поміщають котушку керування. При проходження струм керування утворюється магнітний потім, силові лінії якого замикаються через язички і проміжок. В результаті виникає електромагнітне зусилля, яке притягує між собою язички. При зменшенні магнітного поля нижче певного значення язички під дією пружних сил повертаються в початковий стан і розмикають контакти. Геркони випускаються на замикання розмикання і перемиканя. Широко застосовуються в якості кінцевих вимикачів.
+ висока швидкодія (час спрацювання – частки мс)
+ висока надійність
+ мала собівартість
+ граничне число спрацювань - 107..109
- мале навантаження на контакти
Поляризовані реле.
Будуються за різними схемами, але принцип такий, що в одній частині магнітопроводу магнітний потік підмагнічування шумується з потоком керування, а в другій - віднімається. Підмагнічування магнітопроводу здійснюється постійним магнітом, в окремих випадках обмоткою підмагнічування.
Особливість поляризованих реле - реагують на знак (напрямок) струму керування.
В даній конструкції реле магнітний потік підмагнічування шумується з потоком керування, в іншій – віднімається. Сумарна різниця потоків в зазорах створює зусилля притягання якоря. При зміні напрямку струму керування змінюється напрям сили притягання якоря і він переміщається в протилежному напрямку. Є різні типи реле, в яких різне настроювання контактів.
Якщо якір поляризованого реле при відсутності сигналу управління займає середнє положення, то таке настроювання називається трипозиційне.
Якщо для зміни положення якоря треба змінити напрямок струму в обмотці керування, а після зняття цього струму якір залишається в цьому положенні, то таке настроювання називається двопозиційним. Якір може мати стійке положення біля лівого або правого контакту при відсутності струму керування.
Електромагнітні реле змінного струму.
Реле цього типу застосовують при живленні обмотки керування змінною напругою. Робота таких реле має ряд особливостей, які визначають їх конструкцію. Для зменшення витрат на гістерезис і вихрові струми осердя,якір і ярмо реле змінного струму виготовляють з електротехнічної сталі, аналогічно як в трансформаторів. Окрім того в таких реле передбачається пристрій, який запобігає відпаданню якоря в момент рівності нулю струму живлення обмотки керування.
При синусоїдальній напрузі живлення струм в обмотці, а відповідно і магнітний потік в якорі, буде мінятися майже за синусоїдальним законом, а отже крива електромагнітного зусилля Fем:
В момент, коли тягове зусилля стане меншим протидіючого зусилля пружини, якір на деякий час відходить від осердя і знову притягається при зростанні тягового зусилля. Такі періодичні удари по якорю проводять до зносу механіки реле. Вібрацію можна припинити різними методами.
1. Встановлення двофазного реле
Таке реле має магнітопровід з двох осердь, двох котушок та спільного якоря. Одна обмотка живиться безпосередньо від змінної напруги керування, інша – через конденсатор. Струм в другій обмотці випереджає струм в першій на 900. Оскільки тягове зусилля пропорційне сумі потоків, середнє значення не буде мінятися в часі.
2. Реле з коротко замкнутою обмоткою. Таке реле має розрізне осердя, одну з 2х частин якого охоплює декілька витків товстого мідного дроту. Протікаючий по обмотці керування змінний струм створює потоки Ф1 і Ф2. Зсув по фазі цих потоків створює коротко замкнутий виток. Сумарне зусилля Fем на якір визначається сумою потоків і є завжди більше зусилля протидії.
Часто в колах змінного струму застосовують нейтральні реле постійного струму, обмотку керування якого включають через випростовував.
|
|
|
|
|
Дата добавления: 2015-05-26; Просмотров: 3724; Нарушение авторских прав?; Мы поможем в написании вашей работы!