КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Копировально-фрезерные станки
|
|
|
|
Копировально-фрезерные станки предназначены для обработки разнообразных плоских профилей (изготовление кулачков, шаблонов, матриц и т. д.) и пространственно-сложных поверхностей (объемное фрезерование). По числу шпинделей станки делят на одношпиндельные и многошпиндельные, а по принципу действия — на станки прямого и станки следящего действия. В копировальных станках прямого действия всякое изменение формы - задающего устройства (шаблона или копира) производит непосредственное воздействие на копировальный ролик или палец, связанный жестко с фрезой. В станках следящего действия посредством копировального ролика или пальца воспринимается всякое изменение формы задающего копира и передается фрезе через усилительное устройство. Фрезерование. производят при помощи ощупывания модели копировальным пальцем двумя способами: способом горизонтальных строчек и способом вертикальных строчек.
При первом способе (рис. 45,а) стол станка совершает автоматическое задающее горизонтальное перемещение, а фрезерная головка — непрерывное следящее продольное и периодическое вертикальное перемещение на величину строки. При втором способе (рис. 45,б) фрезерная головка совершает задающее вертикальное и следящее продольное перемещения, а стол -периодическое горизонтальное перемещение на величину s. Палец следящего устройства касается модели и автоматически дает команду (импульсы) приводам для одновременного перемещения фрезы по обрабатываемой детали и пальца по рельефу копируемой модели, поскольку и следящий палец и фреза смонтированы на общем корпусе фрезерной головки.
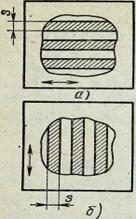
Рис.45. способы ощупывания модели
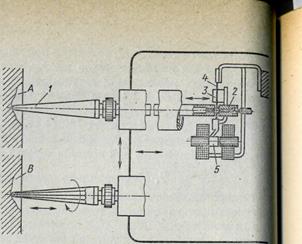
Схема работы следящего пальца показана на рис. 46. Палец 1 касается поверхности (рельефа) модели А под определенным давлением; в случае изменения этого давления палец может иметь осевое перемещение, которое через шарик передается его тыльной частью втулке 2, а последняя через пружину касается острия регулировочного винта. Таким образом, осевые перемещения пальца управляются в зависимости от давления на палец. Указанные осевые перемещения через подвешенный на пружине 4 груз 3, соединенный с втулкой 2, передаются к сердечнику 5 трансформатора. Сердечник подвешен на конце указанных грузов, его перемещение в магнитном поле трансформатора изменяет электромагнитные импульсы, которые направляются в усилительные устройства, а затем поступают в цепи управления электродвигателями подач.
|
Рис. 46. Схема работы следящего пальца
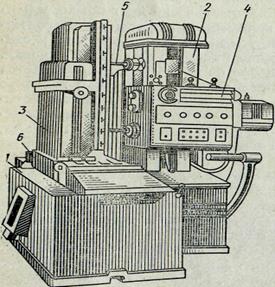
На рис. 47 представлен горизонтальный копировально-фрезерный полуавтомат, предназначенный для объемного фрезерования деталей по моделям выполненным в натуральную величину. Кинематика станка обеспечивает следующие движения детали и фрезы относительно друг друга: главное движение - вращение фрезы 5, вертикальное и поперечное перемещения шпиндельного блока 4 по стойке 2, продольное перемещение стола 6 по станине 1 совместно с кронштейном 3, на котором установлена обрабатываемая деталь и модель.
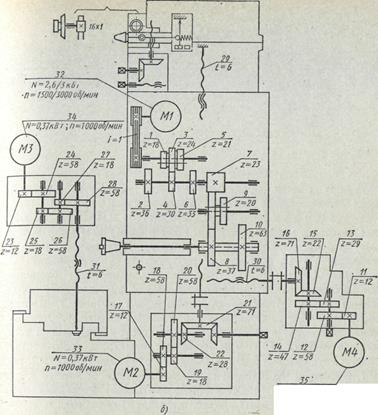
Цепь главного вращательного движения фрезы (рис. 48) начинается от электродвигателя 32 через ременную передачу, зубчатые колеса 1 - 2 или 3 - 4 или 5 - 6, колеса 7 - 9 - 8 или 7 - 9 - 10 и заканчивается шпинделем. Поскольку электродвигатель двухскоростной, то на шпинделе станка можно получить 12 различных скоростей.
Цепь вертикального перемещения шпиндельного блока 4 (см. рис. 47) берет начало от электродвигателя постоянного тока (рис. 48), затем через зубчатые передачи 17 — 18, 19 — 20, 22 —21, и заканчивается винтом 29. Поперечное перемещение шпиндельного блока осуществляется от электродвигателя постоянного тока 35 и через зубчатые колеса 11—12,13 — 14,15 —16 передается на винт 30.
Продольное перемещение стола 6 (см. рис. 47) осуществляется от самостоятельного электродвигателя постоянного тока 34 (рис. 48) и через зубчатые колеса 23 — 24, 25 — 26, 27 — 28 передается на винт 31.
|
Рис. 47. Электрокопировальный фрезерный полуавтомат
Сравнительно наибольшее количество моделей фрезерных станков вполне удовлетворяет промышленность. Консольно-горизонтально-фрезерные, универсальные и вертикально-фрезерные станки имеют унифицированные столы размером 160 х 320, 200 х 800, 250 х 1000, 320 х 1250 и 400 х 1600 мм. Одностоечные станки строят с размером стола от 500 х 1250 до 1600 х 5000 мм, а в двухстоечном исполнении - от 400 х 1250 до 2500 х 8000 мм. Копировально-фрезерные станки выпускают в ограниченном количестве, с размером стола 200 х 320, 320 х 1250 и 630 х 1250 мм.
|
Рис. 48. Кинематическая схема электрокопировапльного фрезерного полуавтомата мод. 6Б443Г
|
|
|
|
|
Дата добавления: 2015-06-25; Просмотров: 758; Нарушение авторских прав?; Мы поможем в написании вашей работы!