КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Система управления
|
|
|
|
Системы управления машин предназначены для силового управления движением рабочих органов или управления режимом работы двигателя, муфт, тормозами, коробкой передач и иными элементами привода.
Требования к системам управления машин сводятся к тому, чтобы управление механизмами осуществлялось с минимальными затратами нервных и физических усилий машиниста (оператора) и обеспечивало максимальную производительность машины.
Управление силовой установкой и машиной в целом связано с регулированием нескольких параметров, которые для удобства объединяют. Такие агрегаты представляют собой пульты управления, механизмы которых связаны между собой кинематически. Обычно их устанавливают в кабине машиниста.
К устройству кабины машиниста и пультов управления предъявляют высокие требования. В частности, крайне важно расположение сидения машиниста относительно рукоятей, рычагов и педалей, их взаимное размещение, а также комфортабельность кабины, величина углов обозрения.
Система управления классифицируется по следующим основным признакам:
– способу передачи энергии к исполнительному механизму – механические (рычажные и канатно-блочные), гидравлические, пневматические, электрические и комбинированные;
– источнику энергии – мускульная энергия машиниста или основная (вспомогательная) силовая установка;
– принципу действия – ручные и автоматические.
Механическая рычажная система используется для управления с помощью рычагов (приводимых в движение педалями и рукоятками), муфт и тормозов. Нормальное усилие на рычагах не более 30-40 Н при ходе 25 см и менее, а на педали не более 80 Н при том же ходе. Прикладываемое к рукоятке или педали усилие увеличивается посредством рычагов трансмиссии и передается к исполнительным органам.
На рисунке 2.7 показано управление ленточным тормозом от рукоятки..
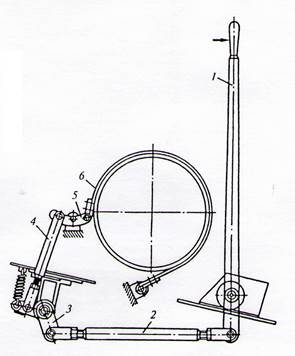
Рисунок 2.7 – Рычажная система управления /1/
Движение рычага – 1 через регулировочную тягу – 2 и рычаг – 3 передается толкателю – 4, который через рычаг – 5 затягивает ленту – 6. Этот вид управления прост по устройству, удобен для обслуживания, но утомителен для машиниста из-за относительно больших усилий на перемещение рукояток и педалей.
Гидравлические системы управления бывают двух видов – насосные и безнасосные. В первом случае рабочее давление жидкости гидросистемы создается насосом, во втором – мускульной силой оператора.
Безнасосные системы управления обычно применяют для управления механизмами, требующими наибольшей чувствительности и плавности включения – тормозами, например. Эти системы не очень уменьшают усилие на рычагах и педалях в сравнении с рычажными механическими системами управления.
Гидравлические безнасосные системы управления (рисунок 2.7) имеют по два цилиндра: командный – 8 и исполнительный – 5, соединенные трубопроводом – 6.
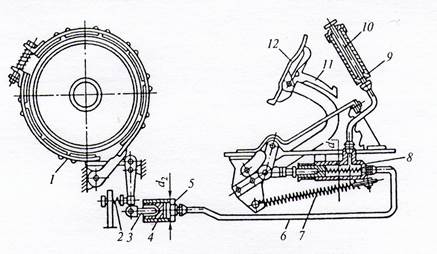
Рисунок 2.7 – Гидравлическая безнасосная система управления /1/
Диаметры цилиндров d 1 и d 2 подбирают так, чтобы при малом усилии и большом ходе на педали управления получить большое усилие и малый ход на штоке – 3 исполнительного цилиндра – 5.
При нажатии на педаль – 12 с фиксирующей защелкой – 11 кулачок поворачивается вокруг своей оси и воздействует на поршень цилиндра – 8 через систему регулировочных тяг. Поршень выдавливает часть рабочей жидкости из командного цилиндра в исполнительный.
Под действием давления рабочей жидкости поршень – 4 перемещается влево, давит на шток – 3, связанный рычагами с тормозной лентой 1.
При снятии нагрузки с педали, возвратная пружина – 7 возвращает педаль в исходное положение. Одновременно с этим поршень цилиндра – 8 под действием пружины, расположенной внутри, перемещается влево, а рычаги тормозной системы под действием возвратной пружины – 2 освобождаются от шкива. Возможные утечки рабочей жидкости компенсируются ее поступлением из бачка – 9 при открытой запорной игле – 10.
Насосное гидравлическое управление принципиально отличается от безнасосного тем, что необходимое усилие создается насосом, подающим жидкость под давлением в исполнительный цилиндр. При этом не требуется большого усилия на рычагах управления, т.к. машинист перемещает лишь золотники распределителей, соединяющие исполнительные цилиндры с насосом или сливным баком.
Один из основных показателей, характеризующих режим работы гидравлических насосных систем управления, является число включений – за 1 час. По этому показателю режимы работы бывают легкими – Z < 300, средними – Z = 300-700 и тяжелыми – Z > 700.
Достоинством гидравлических систем управления являются компактность и малые размеры пульта управления, рабочих цилиндров и двигателей вследствие применения значительных давлений, возможность передачи усилий к отдаленным точкам, отсутствие сложных рычажных систем и шарнирных соединений.
При гидравлическом управлении усилие на рычагах управления и их ход значительно ниже, чем при рычажном механическом управлении. Это уменьшает утомляемость машиниста и повышает производительность труда.
К недостаткам гидравлических систем относятся резкость включения механизмов, вызывающую возникновение динамических нагрузок, потребность в специальных сортах рабочих жидкостей и повышенный класс точности изготовления гидроаппаратуры. При этом наблюдаются затруднения при эксплуатации машин в условиях холодного и жаркого климата.
Пневматические системы управления отличаются от гидравлических тем, что в них вместо жидкости используют сжатый воздух (рисунок 2.8).
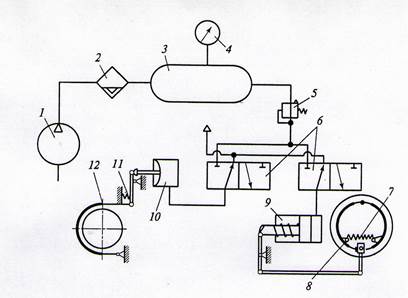
Рисунок 2.8 – Пневматическая система управления /1/
В этой системе сжатый воздух от компрессора – 1 поступает в масловлагоотделитель – 2 и затем в ресивер – 3. Контроль давления воздуха в системе осуществляет манометр – 4, а сброс его избытка – предохранительный клапан – 5. Воздух от ресивера направляется к распределителям – 6, а затем к рабочей камере – 10 и пневмоцелиндру – 9, управляющими соответственно ленточным – 12 и колодочным – 8 тормозами машины. Рабочие пружины – 11 и – 7 осуществляют возврат рабочих органов управления в исходное положение.
Преимущество пневматического управления состоит в в простоте конструкции и мягкости включения механизмов. Его недостатки связаны с трудностями очистки воздуха от влаги и пыли, а также низким его давлением – 0,7-0,8 МПа, что увеличивает габариты пневмоагрегатов.
Электрические системы управления преимущественно используют в машинах с электрическим и дизель-электрическим приводами. Управление электроприводом включает пуск и остановку электродвигателя, его реверсирование, изменение частоты вращения и обеспечения безопасности работы.
Электродвигатели мощностью до 15 кВт включаются контроллерами или магнитными пускателями; более мощные – при помощи магнитных станций-контакторов, управляемых специальными командоаппаратами. При контроллерном и контакторном управлении возможно в определенных пределах регулировать частоту вращения вала асинхронных электродвигателей.
Электрическая система компактна по конструкции, надежна в эксплуатации, позволяет использовать автоматику.
Комбинированные системы управления являются сочетанием электрической системы с гидравлической или пневматической. Их достоинства – применение дистанционного управления и сокращение длины масло- и воздухопроводов, составляющих данную комбинированную систему.
В зависимости от характера воздействия машиниста на управляемые механизмы различают системы управления непосредственного действия и с усилителями (сервоприводы). К первым относятся механическая рычажная и гидравлическая безнасосная системы управления, ко второй – пневматическая, гидравлическая насосная, электрическая и комбинированная системы.
В системах автоматизированного управления рабочими органами используют следящие системы гидропривода – гидравлическая система с обратной связью, обеспечивающей усиление мощности.
Конструкция унифицированного гидроруля пневмоколесных машин разработана ВНИИстроймашем (цит. по /1/). Гидроруль представляет собой рулевой механизм дозирующего типа с обратной связью по объему рабочей жидкости и отсутствием связи с механизмом поворота машины (рисунок 2.9).
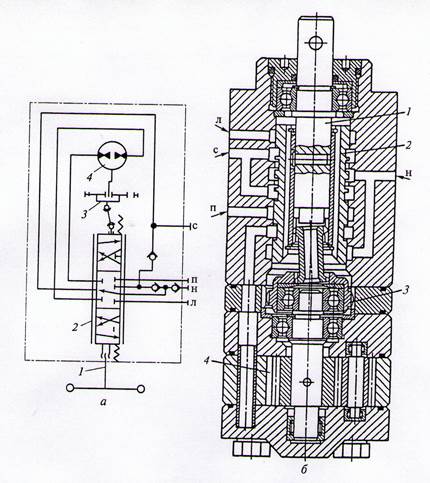
Рисунок 2.9 – Схема (а) и конструкция (б) унифицированного гидроруля для пневмоколесных машин: н, с, л, п – гидролинии напора, слива и поворота колес в лево и вправо /1/
Основным параметром гидроруля является объем рабочей жидкости (подача), подаваемой на один оборот вала гидроруля. Для машин с небольшой мощностью гидроруль (рисунок 2.9, а) выполнен в виде моноблочной конструкции по модульному принципу и состоит из трех модулей распределительного блока с золотником – 2, рулевым валом – 1 и винтовым дифференциальным устройством; планерного редуктора – 3 и дозатора – 4.
Дозирующее устройство, выполненное в виде гидромотора обратной связи, позволяет рулевой системе контролировать объем рабочей жидкости, поступающей к исполнительному цилиндру. При этом обеспечивается пропорциональность дозируемого объема рабочей жидкости угловому перемещению вала гидроузла.
Такие гидрорули бывают четырех типоразмеров с объемами подачи 125, 250, 500 1000 см3. Для машин большей мощности предусмотрен выпуск рулевых механизмов с объемом подачи 8000 см3.
В последние годы для автоматизации машин средней и большой мощностей стали использовать микроэлектронику, микропроцессоры и бортовые ЭВМ. В системе автоматизированного управления современных машин подсистема контроля над работой отдельных агрегатов и узлов может обеспечить проверку 20-30 параметров.
Контролируемые параметры часто разбивают на следующие основные группы: предпускового контроля; эксплуатационные, постоянно контролируемые во время работы; диагностические, облегчающие определение причин неполадок или указывающие на необходимость ТО или ремонта машины.
К параметрам предпускового контроля относят уровень топлива, масла в картере, рабочей и охлаждающей жидкости, а также положение передач, муфт и тормозов трансмиссии.
В эксплуатационных параметрах выделяют предупредительные и аварийные. К аварийным относят минимальное давление масла в двигателях, максимальную температуру охлаждающей и рабочей жидкости, максимальную частоту вращения вала двигателя, минимальный уровень жидкости в системах управления муфтами и тормозами, в баке системы гидропривода, минимальное давление в тормозных линиях, рулевом управлении, максимальный крен машины относительно горизонта, максимальное напряжение бортовой сети и др.
Выбор конкретных контролируемых параметров при установке на машине бортовой контрольно-информационной системы обязательно согласовывается с потребителями.
|
|
|
|
|
Дата добавления: 2015-06-25; Просмотров: 1114; Нарушение авторских прав?; Мы поможем в написании вашей работы!