КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Управление РВ самолета Суперджет
|
|
|
|
Руль высоты состоит из двух секций, установленных на задней кромке стабилизатора. С помощью руля высоты и стабилизатора осуществляется продольное управление самолётом. Руль высоты используется для маневрирования в вертикальной плоскости, а стабилизатор для балансировки самолёта в установившемся полёте. Обе поверхности руля высоты отклоняются симметрично. Отклонение руля высоты приводит к изменению угла атаки самолёта и угла тангажа. Полный рабочий диапазон углов отклонения руля высоты — от минус 27° до плюс 22°. Знак «+» соответствует отклонению задней кромки руля высоты вниз.
Схема управления рулём высоты в основном режиме приведена на рис.4.14. Управление рулём высоты осуществляется по сигналам от боковой ручки управления самолётом (БРУС) при управлении по тангажу. Для изменения положения руля высоты используются электрогидравлические сервоприводы. Приводы крепятся к кронштейнам на задней кромке стабилизатора (см.Рис.4.15). Для каждой секции руля высоты предусмотрено по два привода — внутренний и внешний. Один из приводов непосредственно приводит поверхность в движение (работает в активном режиме), другой используется в качестве резервного (находится в пассивном/демпфирующем режиме). При каждом следующем полёте режимы работы приводов соответственно меняются. Автоматическое переключение режимов работы приводов также осуществляется при потере питания (потере мощности) или в случае отказа привода: привод, работавший ранее в активном режиме, переключается на пассивный режим с демпфированием, а привод, функционировавший до этого в пассивном режиме, переключается на активный режим работы. При отказе обоих приводов оба привода переключаются в режим демпфирования.
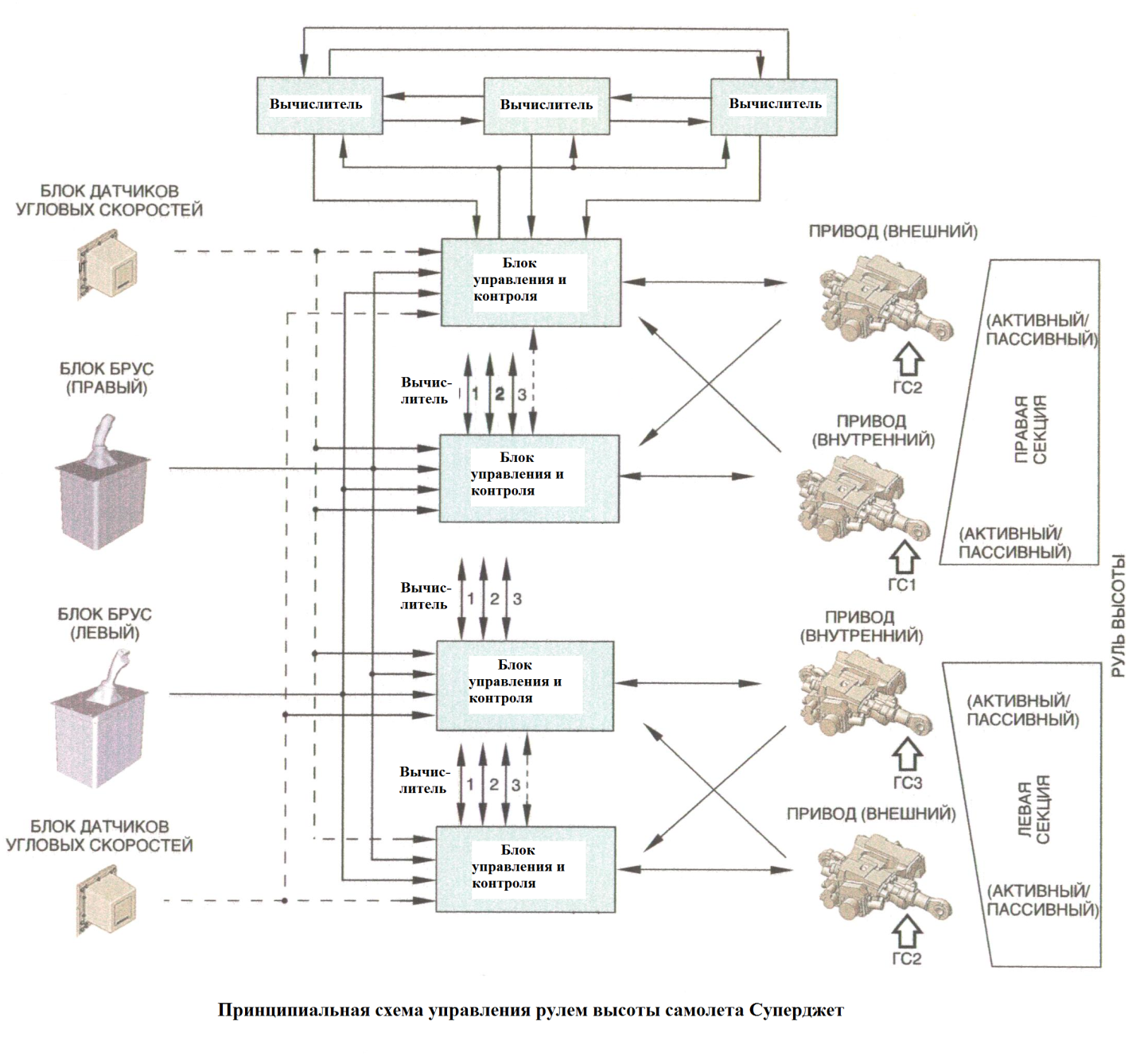
Рис.4.14
Управление работой каждого привода осуществляется одним блоком управления и контроля приводов. Управление рулём высоты осуществляется в двух режимах: основном и минимальном. В основном режиме управление осуществляется с помощью трёх вычислителей системы управления самолётом, работающих совместно с блоками управления и контроля приводов. При функционировании в основном режиме блоки управления и контроля приводов служат для обмена информацией с блоками вычислителями и выдачи командных сигналов от вычислителей на приводы. В случае отказа стабилизатора при функционировании в основном режиме функция автоматической балансировки по тангажу обеспечивается рулём высоты. В управлении рулём высоты задействованы два блока датчиков угловых скоростей. Они измеряют сигналы угловой скорости самолёта по трем ортогональным направлениям и выдают их в блоки управления и контроля приводов.

Рис.4.15
В кабине экипажа предусмотрена индикация положения руля высоты, осуществляемая по сигналам, получаемым от датчиков штоков приводов, а также информации о состоянии приводов, угле триммирования руля высоты и об отказах системы.
Блоки БРУС используются в управлении рулём высоты для выдачи:
— командных сигналов по тангажу путём перемещения боковой ручки управления самолётом вперёд/назад в пределах установленного диапазона,
— командных сигналов приоритета боковой ручки управления самолётом.
В блоках БРУС размещаются 8 датчиков положения для управления по тангажу: четыре используются в каналах управления и четыре — в каналах контроля. Датчики тангажа предназначены для формирования командных сигналов пропорционально отклонению боковой ручки управления самолётом и последующей выдачи их в блоки управления и контроля.
Блоки управления и контроля выполнены по двухканальной схеме. В каждом блоке предусмотрены канал управления и контроля. Управление рулём высоты осуществляется по каналу управления. Канал контроля контролирует работу канала управления и переводит систему в безопасный режим функционирования при возникновении и обнаружении отказов и неисправностей.
Работа на отклонение руля высоты в основном режиме
Командир (второй пилот) перемещает боковую ручку управления самолётом. Датчики, расположенные в блоке БРУС, преобразуют механическую энергию перемещения боковой ручки управления самолётом в электрические сигналы и выдают их в блоки управления и контроля. Блоки осуществляют демодуляцию сигналов (преобразование их в цифровые) и выдают демодулированные сигналы в вычислители, которые обрабатывают сигналы в соответствии с алгоритмами управления основного режима.
После обработки сигналов вычислители выдают консолидированный (результирующий) сигнал по заданному алгоритму обратно в блоки управления и контроля. Блоки управления и контроля передают сигналы на приводы, замыкая цепи управления приводами. Приводы отрабатывают сигналы, отклоняя руль высоты на заданные углы. Принципиальная схема привода системы управления РВ приведена на
На рис.4.16. приведена типовая конструктивная схема привода в системе управления современного ЛА (А-320, Суперджет и др.)
Рассмотрим назначение и конструкцию основных элементов привода.
(а) Силовой гидроцилиндр
Силовой гидроцилиндр включает в себя поршень из коррозионно-стойкой стали со штоком с хромовым покрытием. Поршень уплотнен при помощи двойных кольцевых уплотнений. Шток поршня уплотнён аналогичным образом, путем последовательной установки уплотнений с обеих сторон. Такой метод двойного уплотнения способствует увеличению срока службы и обеспечивает необходимый уровень герметичности.
Внутри полого штока поршня расположен датчик перемещения, представляющий собой линейный индукционный датчик. Функцией датчика является выдача обратного сигнала в блоки управления и контроля о положении штока силового цилиндра привода.
(б) Блок клапанов
Блок клапанов выполнен из алюминиевого сплава, Он включает в себя гидравлические клапаны для управления золотниковым распределителем. В линии нагнетания (Н) гидравлической жидкости установлен фильтр для предотвращения засорения дросселирующих элементов привода. Узел блока клапанов состоит из:
- клапана переключения режима;
- электрогидравлического сервоклапана;
- электромагнитного клапана;
- аккумулятора.
Клапан переключения режима
Клапан переключения режима (КПР) представляет собой сборку цилиндрического подпружиненного золотника и клапанной втулки. Управление золотником осуществляет электромагнитный клапан. В активном режиме под давлением гидравлической жидкости цилиндрический золотник сжимает пружину. При этом клапан переключения режима в «открытом» положении соединяет управляющий электрогидравлический сервоклапан с камерами силового цилиндра привода (по каналам Упр.1 и Упр.2). Клапан переключения имеет датчик линейного перемещения. Он подсоединен к блоку клапанов и выдает сигнал положения цилиндрического золотника. Клапан переключения режима работает в двух режимах:
- активном, когда электромагнитный клапан (ЭМК) также находится в активном режиме (клапан осуществляет соединение линии нагнетания ГС с приводом), как показано на рисунке;
- пассивном/демпфирующем, когда ЭМК также находится в пассивном режиме (клапан отсекает подачу гидрожидкости на торец клапана переключения и тот находится в крайнем левом положении). В этом случае полости гидроцилиндра соединяются через дроссель. Пополнение полостей цилиндра в данном режиме осуществляется из линии слива через анти-кавитационный клапан.
Электрогидравлический сервоклапан
Электрогидравлический сервоклапан является четырехходовым двухпозиционным электрогидравлическим сервоклапаном. Сервоклапан предназначен для преобразования электрического управляющего сигнала в гидравлический.
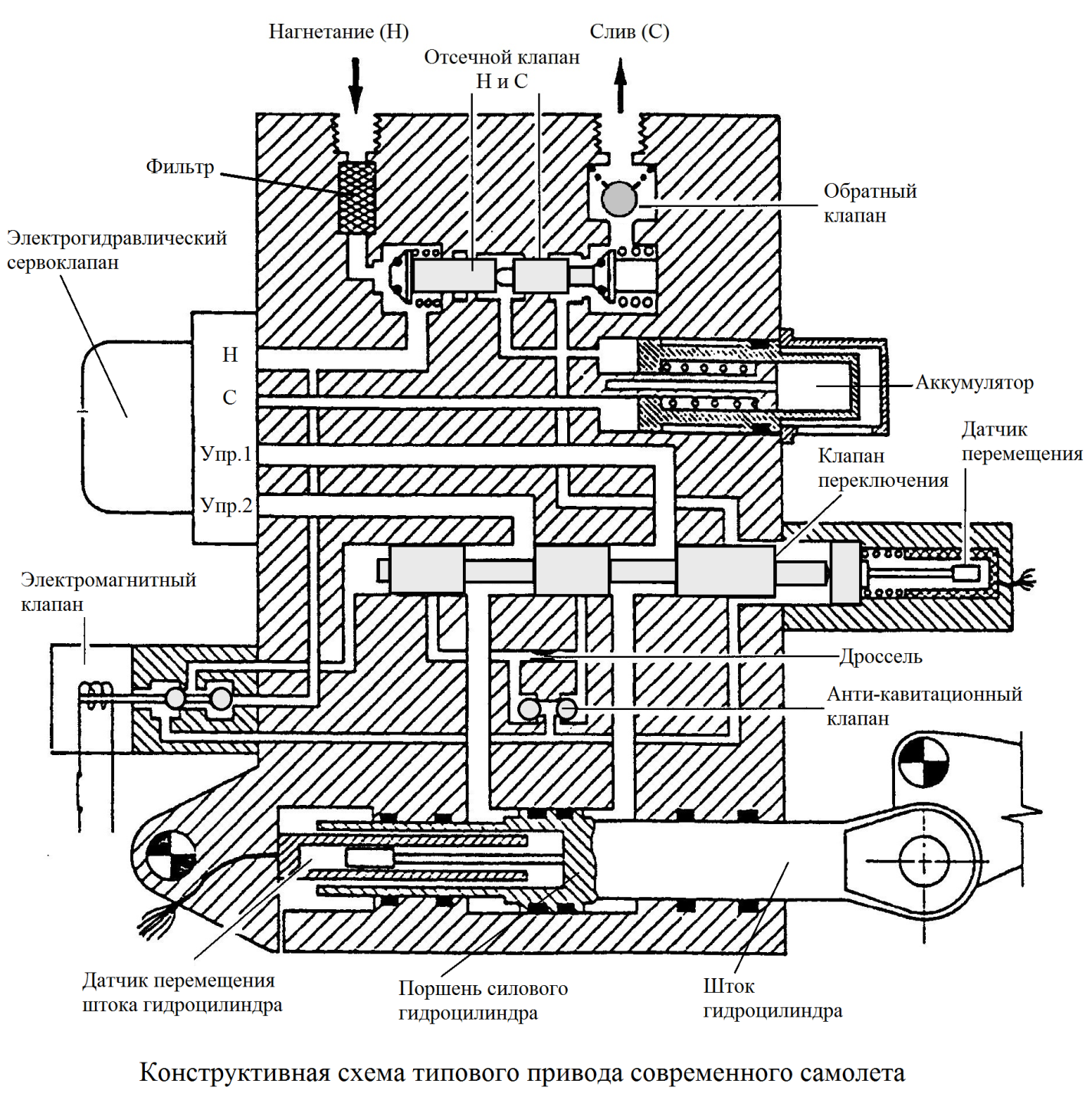
Рис.4.16
Аккумулятор
В дополнение к обеспечению функции демпфирования в случае отказа гидравлической системы, отсечной клапан отсекает привод от линии нагнетания и линии слива. Аккумулятор обеспечивает резерв гидравлической жидкости во внутренних полостях отключенного привода и небольшое давление, достаточное, чтобы сохранять полости цилиндра наполненными. Аккумулятор состоит из пружины и поршня. Наличие гидрожидкости может быть проверено через смотровое окно по положению поршня.
Активный режим работы привода
При работе в основном режиме электропитание напряжением 28 В подается на электромагнитный клапан (запитанный в «открытом» положении). Электромагнитный клапан «открывается» и нагнетает давление в клапан переключения режима. Золотник клапана переключения режима перемещается под давлением в «открытое» положение, сжимая пружину. В «открытом» положении электромагнитного клапана рабочие камеры соединяются с сервоклапаном. Сервоклапан служит, как отклоняющее устройство. Его работой управляет вычислитель через блок управления и контроля. Положение электромагнитного клапана контролируется индуктивным датчиком перемещения (положения), встроенным в крышку золотника.
Пассивный режим работы привода (режим демпфирования)
Привод обеспечивает демпфирование в пассивном режиме. Переход привода в режим демпфирования осуществляется при:
- отключении электромагнитного клапана;
- слишком низком уровне давления в линии нагнетания гидросистемы.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 3091; Нарушение авторских прав?; Мы поможем в написании вашей работы!