КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Центр тяжести тел. На все точки тела, находящегося вблизи поверхности Земли, действуют силы – силы тяжести этих точек или их вес
|
|
|
|
На все точки тела, находящегося вблизи поверхности Земли, действуют силы – силы тяжести этих точек или их вес  . Вообще эти силы будут сходящимися – линии действия их пересекаются в центре Земли. Но, если пренебречь размерами тела в сравнении с размерами Земли, то можно считать их параллельными.
. Вообще эти силы будут сходящимися – линии действия их пересекаются в центре Земли. Но, если пренебречь размерами тела в сравнении с размерами Земли, то можно считать их параллельными.
Центр этих параллельных сил, сил тяжести точек, называется центром тяжести тела.
Значит находить центр тяжести тел можно как центр параллельных сил. Например, координаты его
 (2)
(2)
где  – вес каждой точки тела, а
– вес каждой точки тела, а  – вес всего тела.
– вес всего тела.
Рис.36
При определении центра тяжести полезны несколько теорем.
1) Если однородное тело имеет плоскость симметрии, то центр тяжести его находится в этой плоскости.
Если оси х и у расположить в этой плоскости симметрии (рис.36), то для каждой точки с координатами  можно отыскать точку с координатами
можно отыскать точку с координатами  . И координата
. И координата  по (2), будет равна нулю, т.к. в сумме
по (2), будет равна нулю, т.к. в сумме  все члены имеющие противоположные знаки, попарно уничтожаются. Значит центр тяжести расположен в плоскости симметрии.
все члены имеющие противоположные знаки, попарно уничтожаются. Значит центр тяжести расположен в плоскости симметрии.
2) Если однородное тело имеет ось симметрии, то центр тяжести тела находится на этой оси.
Действительно, в этом случае, если ось z провести по оси симметрии, для каждой точки с координатами  можно отыскать точку с координатами
можно отыскать точку с координатами  и координаты
и координаты  и
и  , вычисленные по формулам (2), окажутся равными нулю.
, вычисленные по формулам (2), окажутся равными нулю.
Аналогично доказывается и третья теорема.
3) Если однородное тело имеет центр симметрии, то центр тяжести тела находится в этой точке.
И ещё несколько замечаний.
Первое. Если тело можно разделить на части, у которых известны вес и положение центра тяжести, то незачем рассматривать каждую точку, а в формулах (2) – определять как вес соответствующей части и – как координаты её центра тяжести.
Второе. Если тело однородное, то вес отдельной части его  , где
, где  - удельный вес материала, из которого сделано тело, а
- удельный вес материала, из которого сделано тело, а  - объём этой части тела. И формулы (1) примут более удобный вид. Например,
- объём этой части тела. И формулы (1) примут более удобный вид. Например,

И аналогично, 
 где
где  - объём всего тела.
- объём всего тела.
Третье замечание. Если тело состоит из однородных пластин одинаковой, малой толщины, то объём каждой пластины  где
где  – площадь пластины, d – толщина. И координаты центра тяжести будут определяться только с помощью площадей:
– площадь пластины, d – толщина. И координаты центра тяжести будут определяться только с помощью площадей:

где  – координаты центра тяжести отдельных пластин;
– координаты центра тяжести отдельных пластин;  – общая площадь тела.
– общая площадь тела.
Четвёртое замечание. Если тело состоит из стержней, прямых или криволинейных, однородных и постоянного сечения, то вес их  где li – длина,
где li – длина,  – вес единицы длины (погонного метра), а координаты центра тяжести будут определяться с помощью длин отдельных участков:
– вес единицы длины (погонного метра), а координаты центра тяжести будут определяться с помощью длин отдельных участков:

где  – координаты центра тяжести
– координаты центра тяжести  -го участка;
-го участка; 
Отметим, что согласно определению центр тяжести - это точка геометрическая; она может лежать и вне пределов данного тела (например, для кольца).
15.Способы задания движения точки.Определение скорости и ускорения точки при различных способах задания ее движения.
Способы задания движения точки
Для задания движения точки можно применять один из следующих трех способов:
1) векторный, 2) координатный, 3) естественный.
1. Векторный способ задания движения точки.
Пусть точка М движется по отношению к некоторой системе отсчета Oxyz. Положение этой точки в любой момент времени можно определить, задав ее радиус-вектор  , проведенный из начала координат О в точку М (рис. 1).
, проведенный из начала координат О в точку М (рис. 1).
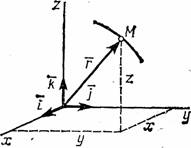
Рис.1
При движении точки М вектор будет с течением времени изменяться и по модулю, и по направлению. Следовательно, является переменным вектором (вектором-функцией), зависящим от аргумента  :
:
 .
.
Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор и найти положение движущейся точки.
Геометрическое место концов вектора , т.е. годограф этого вектора, определяет траекторию движущейся точки.
2. Координатный способ задания движения точки.
Положение точки можно непосредственно определять ее декартовыми координатами х, у, z (рис.1), которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т.е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т. е. знать зависимости
 ,
,  ,
,  .
.
Уравнения представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения.
Чтобы получить уравнение траектории надо из уравнений движения исключить параметр  .
.
Нетрудно установить зависимость между векторным и координатным способами задания движения.
Разложим вектор на составляющие по осям координат:
где  - проекции вектора на оси;
- проекции вектора на оси;  – единичные векторы направленные по осям, орты осей.
– единичные векторы направленные по осям, орты осей.
Так как начало вектора находится в начале координат, то проекции вектора будут равны координатам точки M. Поэтому

3. Естественный способ задания движения точки.
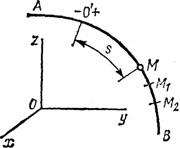
Рис.3
Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис.3) Выберем на этой траектории какую-нибудь неподвижную точку О', которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси).
Тогда положение точки М на траектории будет однозначно определяться криволинейной координатой s, которая равна расстоянию от точки О' до точки М, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка М перемещается в положения M 1, М 2,.... следовательно, расстояние s будет с течением времени изменяться.
Чтобы знать положение точки М на траектории в любой момент времени, надо знать зависимость
 .
.
Уравнение выражает закон движения точки М вдоль траектории.
Определение скорости точки при координатном способе задания движения
Вектор скорости точки  , учитывая, что
, учитывая, что  ,
,  ,
,  , найдем:
, найдем:
 ,
,  ,
,  .
.
Таким образом, проекции скорости точки на координатные оси равны первым производным от соответствующих координат точки по времени.
Зная проекции скорости, найдем ее модуль и направление (т.е. углы  ,
,  ,
,  , которые вектор
, которые вектор  образует с координатными осями) по формулам
образует с координатными осями) по формулам
 ;
;
 ,
,  ,
,  .
.
Итак, численная величина скорости точки в данный момент времени равна первой производной от расстояния (криволинейной координаты) s точки по времени.
Направлен вектор скорости по касательной к траектории, которая нам наперед известна.
Определение скорости точки при естественном способе задания движения
Величину скорости можно определить как предел ( – длина хорды
– длина хорды  ):
):

где  – длина дуги . Первый предел равен единице, второй предел – производная
– длина дуги . Первый предел равен единице, второй предел – производная 
Следовательно, скорость точки есть первая производная по времени от закона движения:

Направлен вектор скорости, как было установлено ранее, по касательной к траектории. Если величина скорости в данный момент будет больше нуля, то вектор скорости направляется в положительном направлении
Определение ускорения при координатном способе задания движения
Вектор ускорения точки  в проекции на оси получаем:
в проекции на оси получаем:
 ,
,  ,
, 
или
 ,
,  ,
,  ,
,
т.е. проекция ускорения точки на координатные оси равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени. Модуль и направление ускорения найдутся из формул
 ;
;
 ,
,  ,
,  ,
,
где  ,
,  ,
,  - углы, образуемые вектором ускорения с координатными осями.
- углы, образуемые вектором ускорения с координатными осями.
Пример 3. Движение точки задано уравнениями  .
.
Из первого уравнения  . Подставив во второе, получим уравнение траектории:
. Подставив во второе, получим уравнение траектории: 
Это уравнение параболы. В начале движения, при  , точка находилась на самом верху, в положении M 0 (
, точка находилась на самом верху, в положении M 0 ( ).
).
А, например, при t =0,5 c она будет в положении M с координатами 

Проекции скорости на оси 
При 

И модуль скорости 
Составляющие скорости по осям и вектор её показаны в масштабе на рис. 7.
Рис.7
Проекции ускорения 
 . Так как проекция вектора ускорения на ось x равна нулю, а на ось y – отрицательна, то вектор ускорения направлен вертикально вниз, и величина его постоянна, не зависит от времени.
. Так как проекция вектора ускорения на ось x равна нулю, а на ось y – отрицательна, то вектор ускорения направлен вертикально вниз, и величина его постоянна, не зависит от времени.
Определение ускорения при естественном способе задания движения. Касательное и нормальное ускорение точки
При естественном способе задания движения вектор  определяют по его проекциям на оси
определяют по его проекциям на оси  , имеющие начало в точке М и движущиеся вместе с нею (рис.8). Эти оси, называемые осями естественного трехгранника (или скоростными (естественными) осями), направлены следующим образом: ось
, имеющие начало в точке М и движущиеся вместе с нею (рис.8). Эти оси, называемые осями естественного трехгранника (или скоростными (естественными) осями), направлены следующим образом: ось  - вдоль касательной к траектории в сторону положительного отсчета расстояния s; ось
- вдоль касательной к траектории в сторону положительного отсчета расстояния s; ось  - по нормали, лежащей в соприкасающейся плоскости и направленной в сторону вогнутости траектории; ось
- по нормали, лежащей в соприкасающейся плоскости и направленной в сторону вогнутости траектории; ось  - перпендикулярно к первым двум так, чтобы она образовала с ними правую тройку. Нормаль , лежащая в соприкасающейся плоскости(вплоскости самой кривой, если кривая плоская), называетсяглавной нормалью, а перпендикулярная к ней нормаль - бинормалью.
- перпендикулярно к первым двум так, чтобы она образовала с ними правую тройку. Нормаль , лежащая в соприкасающейся плоскости(вплоскости самой кривой, если кривая плоская), называетсяглавной нормалью, а перпендикулярная к ней нормаль - бинормалью.
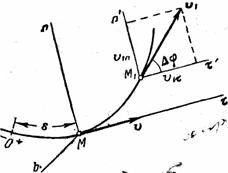
Рис.8
Было показано, что ускорение точки лежит в соприкасающейся плоскости, т.е. в плоскости  ; следовательно, проекция вектора на бинормаль равна нулю (
; следовательно, проекция вектора на бинормаль равна нулю ( ).
).
Вычислим проекции , на две другие оси. Пусть в моментвремени t точка находится в положении М и имеет скорость , a в момент  приходит в положение М 1 и имеет скорость
приходит в положение М 1 и имеет скорость  .
.
Тогда по определению
 .
.
Перейдем в этом равенстве от векторов к их проекциям на оси  и , проведенные в точке М (рис.8). Тогда на основании теоремы о проекции суммы (или разности) векторов на ось получим:
и , проведенные в точке М (рис.8). Тогда на основании теоремы о проекции суммы (или разности) векторов на ось получим:
 ,
,  .
.
Учитывая, что проекция вектора на параллельные оси одинаковы, проведем через точку М 1 оси  параллельные
параллельные  и обозначим угол между направлением вектора
и обозначим угол между направлением вектора  и касательной через
и касательной через  . Этот угол между касательными к кривой в точках М и М 1 называется углом смежности.
. Этот угол между касательными к кривой в точках М и М 1 называется углом смежности.
Напомним, что предел отношения угла смежности к длине дуги  определяет кривизну k кривой в точке М. Кривизна же является величиной, обратной радиусу кривизны
определяет кривизну k кривой в точке М. Кривизна же является величиной, обратной радиусу кривизны  в точке М. Таким образом,
в точке М. Таким образом,
 .
.
Обращаясь теперь к чертежу (рис.9), находим, что проекции векторов  и
и  на оси будут равны:
на оси будут равны:
 ,
,
где и - численные величины скорости точки в моменты и  .
.
Следовательно,
 .
.
Заметим что при  точка М 1 неограниченно приближается к М и одновременно
точка М 1 неограниченно приближается к М и одновременно
 .
.
Тогда, учитывая, что в пределе  , получим для
, получим для  выражение
выражение
 .
.
Правую часть выражения  преобразуем так, чтобы в нее вошли отношения, пределы которых нам известны. Для этого умножим числитель и знаменатель дроби, стоящей под знаком предела, на
преобразуем так, чтобы в нее вошли отношения, пределы которых нам известны. Для этого умножим числитель и знаменатель дроби, стоящей под знаком предела, на  . Тогда будем иметь
. Тогда будем иметь
 ,
,
так как пределы каждого из стоящих в скобке сомножителей при равны:

Окончательно получаем:
 .
.
Итак, мы доказали, что проекция ускорения точки на касательную равна первой производной от численной величины скорости или второй производной от расстояния (криволинейной координаты) s noвремени, а проекция ускорения на главную нормаль равна квадрату скорости деленному на радиус кривизны траектории в данной точке кривой; проекция ускорения на бинормаль равна нулю ( ). Эти результаты выражают собою одну из важных теорем кинематики точки.
). Эти результаты выражают собою одну из важных теорем кинематики точки.
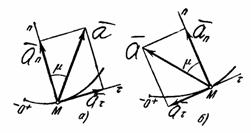
Рис.9
Отложим вдоль касательной и главной нормали векторы  и
и  , численно равные и (рис. 9). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая будет всегда направлена в сторону вогнутости кривой (величина a всегда положительна), а составляющая может быть направлена или в положительном, или в отрицательном направлении оси в зависимости от знака проекции (см. рис.9, а и б).
, численно равные и (рис. 9). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая будет всегда направлена в сторону вогнутости кривой (величина a всегда положительна), а составляющая может быть направлена или в положительном, или в отрицательном направлении оси в зависимости от знака проекции (см. рис.9, а и б).
Вектор ускорения точки изображается диагональю параллелограмма, построенного на составляющих и . Так как эти составляющие взаимно перпендикулярны, то по модулю:
 .
.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 513; Нарушение авторских прав?; Мы поможем в написании вашей работы!