КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механические и скоростные характеристики электродвигателей
|
|
|
|
Статическим или установившимся режимом работы электропривода называется режим при
М = Мс;
Мдин = 0.
В тех случаях, когда статический момент является переменной величиной или функцией какого-либо изменяющегося параметра, установившийся режим может отсутствовать. Например, если в кинематической схеме привода имеется кривошипно-шатунный механизм, то Мс является периодической функцией угла его поворота, и в этом случае режим называется квазиустановившимся.
Зависимости
w = f (М); (2.1)
w = fс (Мс) (2.2)
называются механическими характеристиками электродвигателя и механизма соответственно.
Существующие рабочие механизмы могут иметь самые различные механические характеристики, но наиболее типичными являются три варианта изменения статического момента, показанные на рис.2.1.
1. Мс = const, то есть статический момент не зависит от скорости.
2. Мс = Рс / w; мощность Рс, потребляемая из сети,постоянна, и статический момент обратно пропорционален скорости.
3. Мс = Мн (w / wн)2 - так называемый вентиляторный момент, пропорциональный квадрату скорости.
Если механические характеристики строятся для любого режима работы, в том числе и динамического, то они называются динамическими механическими характеристиками. Если же построение производится при Мдин = 0, то характеристики называются статическими механическими характеристиками или чаще - просто механическими характеристиками.
Статические механические характеристики есть геометрическое место точек на плоскости (w, М), соответствующих установившимся режимам работы электропривода.
Динамические механические характеристики – это геометрическое место точек на плоскости (w, М), где каждая из точек является функцией времени.
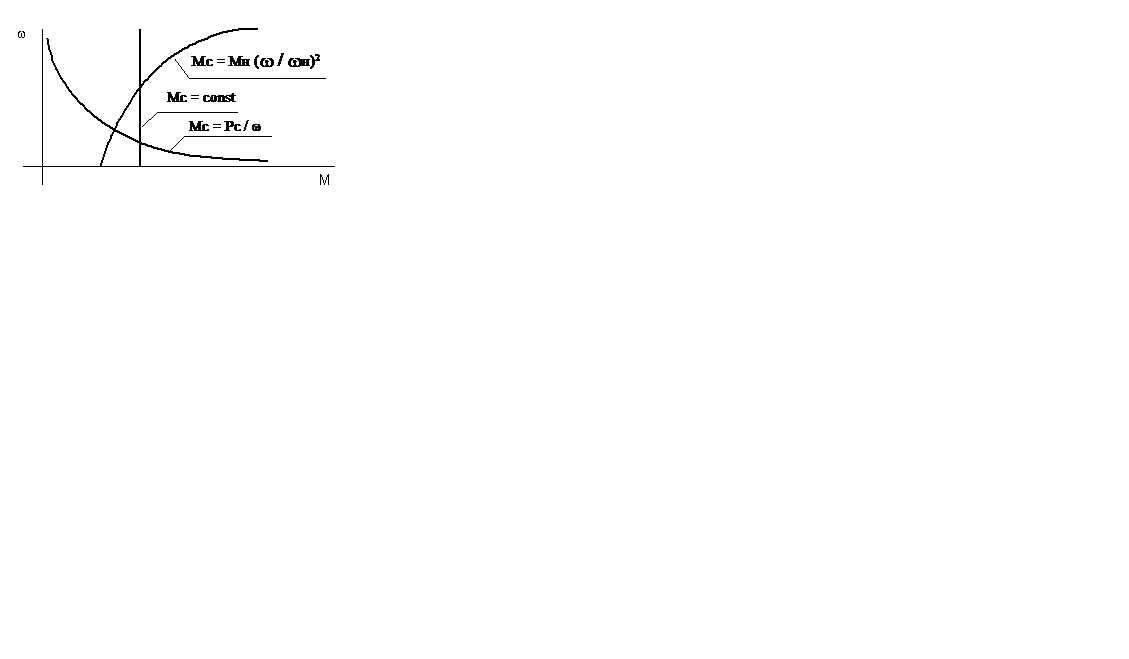
Рис. 2.1. Механические характеристики рабочих механизмов
Из (1.5), (1.18) и (1.19) очевидно, что установившимся режимом работы электропривода является точка пересечения механических характеристик электродвигателя и рабочего механизма.
Скоростными (электромеханическими) характеристиками называются зависимости
w = f (I), (2.3)
где I – ток якоря или ротора электродвигателя.
Для оценки формы механической характеристики используется понятие ее жесткости. Жесткость характеристики – это производная момента по скорости
dМ
b = ¾. (2.4)
dw
В графической интерпретации жесткость – это тангенс угла g наклона касательной в данной точке механической характеристики к оси ординат (скоростей) (рис.2.2)
mМ
b = ¾ tg g, (2.5)
mw
где mМ, mw - масштабы момента и скорости соответственно, Нм / мм;
(1 / с)/ мм.
Жесткость характеристик может быть постоянной, переменной, положительной, отрицательной, равной нулю или бесконечности. На рис.2.3 приведены механические характеристики с различными значениями коэффициента жесткости.

Рис.2.2. Графическое определение жесткости характеристик

Известно, что статический режим – это состояние равновесия относительно угловой скорости w, причем равновесие может быть устойчивым или неустойчивым. Для электроприводов необходимым и достаточным условием устойчивого статического режима является наличие противоположных знаков у приращения скорости и динамического момента при отклонении системы от состояния равновесия, то есть при отрицательном значении коэффициента b жесткости характеристики. Например, на рис.2.3 изображена характеристика при b = var.
Рис.2.3. Механические характеристики с различными
коэффициентами жесткости
Здесь при работе электропривода в точке А при положительном приращении момента М приращение скорости будет отрицательным, то есть жесткость характеристики в этой точке отрицательна и, следовательно, состояние равновесия устойчиво. При работе в точке В при положительном приращении момента приращение скорости также положительно. Следовательно, жесткость характеристики в этой точке положительна и статический режим неустойчив.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 1287; Нарушение авторских прав?; Мы поможем в написании вашей работы!